
控制装置和减速机系统.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共56页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制装置和减速机系统.pdf
本申请公开了一种控制装置和减速机系统。该控制装置对用于驱动摆动型减速机的马达进行控制,该摆动型减速机具有至少一个孔形成于偏心的位置的摆动齿轮部。控制装置具备:角度获取部,其获取与表示上述马达的旋转角的输入旋转角有关的输入信息;估计部,其基于上述孔的数量来估计上述输入旋转角与表示上述摆动型减速机的旋转角的输出旋转角之间的角度误差;以及校正部,其根据上述角度误差来决定补偿电流值,使用上述补偿电流值来校正指令电流值,由此设定向上述马达供给的电流的大小。

减速机监控装置及减速机工作系统.pdf
本申请涉及减速机技术领域,尤其是涉及一种减速机监控装置及减速机工作系统,减速机监控装置包括:温度压力感测器,温度压力感测器连接于减速机的齿轮油注油口上,用于检测减速机内部的油温以及油压。可见,通过其具有的温度压力感测器感测减速机内部的温度以及油压,进而便于用户监测减速机内部齿轮油的升温情况,以及减速机内部是否存在油液泄露的情况发生,进而能够保证减速机的正常工作,更加安全、可靠,此外,本温度压力感测器直接可拆卸地连接于减速机的齿轮油注油口上,无需电缆连接,适用范围更广。
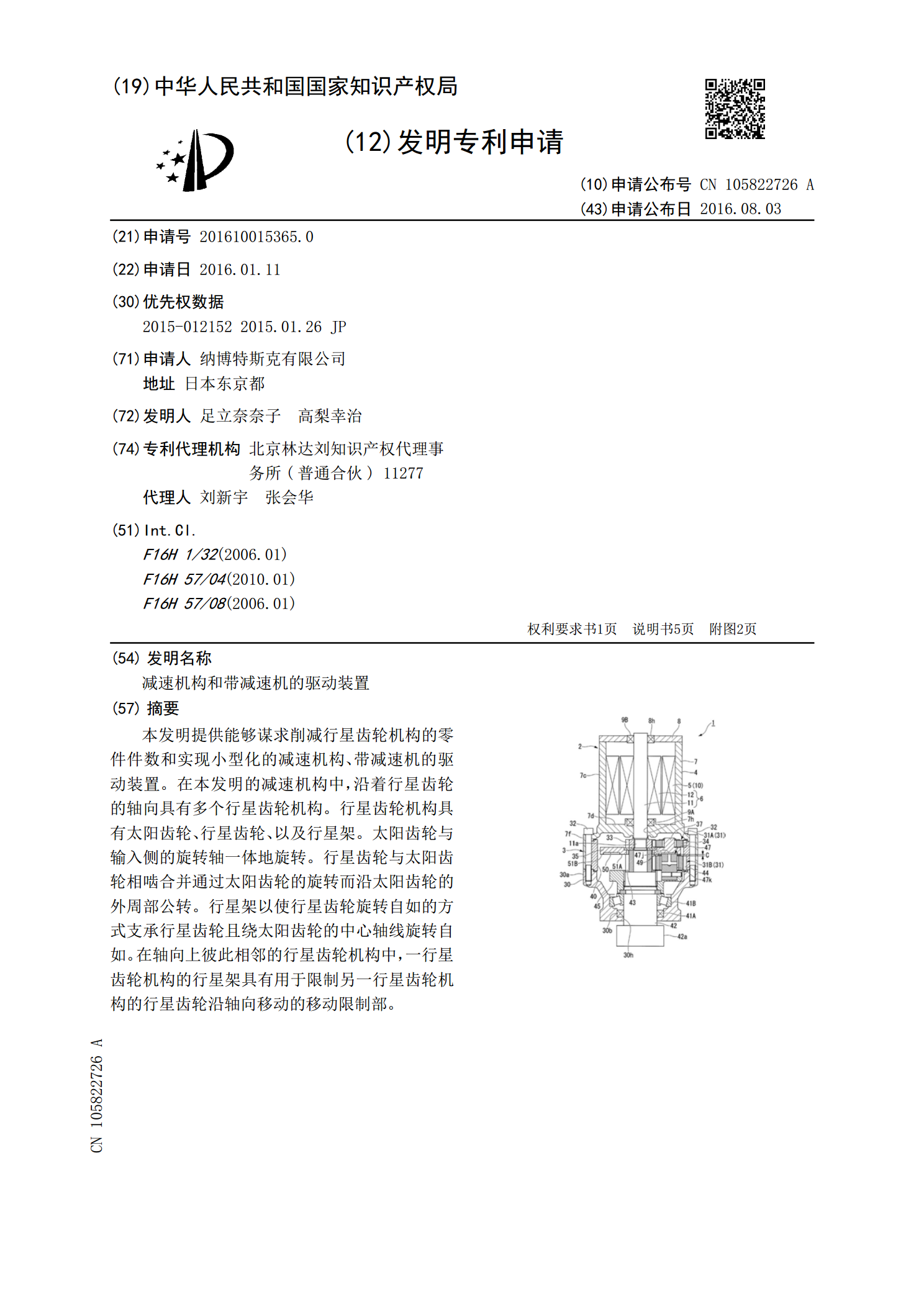
减速机构和带减速机的驱动装置.pdf
本发明提供能够谋求削减行星齿轮机构的零件件数和实现小型化的减速机构、带减速机的驱动装置。在本发明的减速机构中,沿着行星齿轮的轴向具有多个行星齿轮机构。行星齿轮机构具有太阳齿轮、行星齿轮、以及行星架。太阳齿轮与输入侧的旋转轴一体地旋转。行星齿轮与太阳齿轮相啮合并通过太阳齿轮的旋转而沿太阳齿轮的外周部公转。行星架以使行星齿轮旋转自如的方式支承行星齿轮且绕太阳齿轮的中心轴线旋转自如。在轴向上彼此相邻的行星齿轮机构中,一行星齿轮机构的行星架具有用于限制另一行星齿轮机构的行星齿轮沿轴向移动的移动限制部。
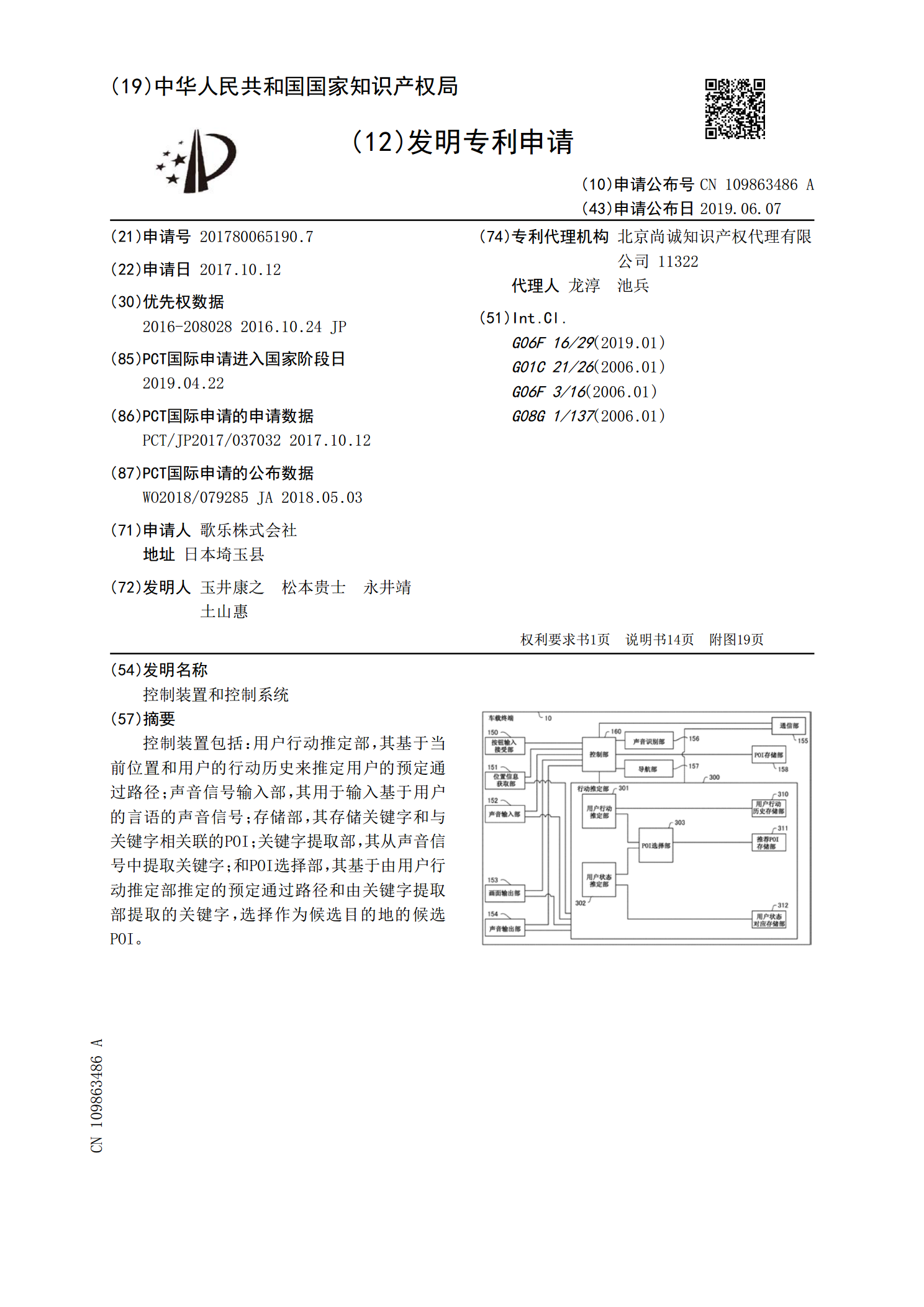
控制装置和控制系统.pdf
控制装置包括:用户行动推定部,其基于当前位置和用户的行动历史来推定用户的预定通过路径;声音信号输入部,其用于输入基于用户的言语的声音信号;存储部,其存储关键字和与关键字相关联的POI;关键字提取部,其从声音信号中提取关键字;和POI选择部,其基于由用户行动推定部推定的预定通过路径和由关键字提取部提取的关键字,选择作为候选目的地的候选POI。

控制车载系统的方法、装置和车载系统及其控制方法、装置.pdf
本发明公开了控制车载系统的方法、装置和车载系统及其控制方法、装置。其中,一种控制车载系统的方法,包括:与车载系统建立连接;将触摸屏的部分或全部设置为触摸板范围;获取触摸板范围内的触摸信息;将触摸信息发送至车载系统。通过本发明将智能控制设备触摸屏的触摸信息发送至车载系统从而控制车载屏幕的光标,当车载系统的屏幕发生故障,触摸功能失效时,可以解决用户继续使用车载系统的屏幕。