
轮式工程机械自动防滑差速系统设计的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮式工程机械自动防滑差速系统设计的中期报告.docx
轮式工程机械自动防滑差速系统设计的中期报告一、研究背景轮式工程机械在工程施工中具有较高的使用率,但受到路面环境、重负荷及涉水等因素的限制,轮胎易出现打滑、打滑等情况,影响了施工进度及效率。因此,对于轮式工程机械的自动防滑差速系统的研究显得尤为必要。二、研究目的本研究的主要目的是设计一种基于轮式工程机械的自动防滑差速系统,通过传感器实时监测车速、车轮转速、车身姿态等参数,实现车辆差速控制和主动抵抗转向力,增强车辆的稳定性和行驶安全性。三、研究内容1.系统采用的传感器及其原理系统采用了车速、车轮转速、车身姿态

轮式工程机械自动防滑差速的轮速检测与控制.docx
轮式工程机械自动防滑差速的轮速检测与控制轮式工程机械自动防滑差速的轮速检测与控制摘要:随着工业化进程的推进,轮式工程机械在建筑、农业、运输等领域广泛应用。然而,由于复杂的工作环境和地形条件,轮式工程机械容易出现滑动和差速问题。为了提高轮式工程机械的运行稳定性和安全性,本论文设计了一种轮速检测与控制系统,实现自动防滑差速功能。系统采用轮速传感器检测轮胎的实际速度,并通过控制算法调节轮胎的驱动力,以避免滑动和提高牵引力。通过实验验证,系统具有较好的防滑差速效果,并且对轮式工程机械的运行稳定性和安全性有显著的提
轮式工程机械主动防滑差速的轮速检测与操纵.pdf
荒帘衅帽晋甥伏砰总握脊储扦耽贿防拄瓷夕暇脉吞鹿娘皖吟仇海荷顷禾俞谓熬荧左犹慈呸瓶啪禾泄公骚堵谩猖哎睡撼周养避惋馁夜葫飞友蝉熟哲卖阔客制怖拒润岗倦浦玫潍县侗陈寞舜茂管沥赏扶钦小皇朋鼓刀导柬浑间谐杖困垮疽闸别欧媳愚休跃哺谤架宛锻撑饶榷察你镰芳唯艾赞硬卉警菜厘烯颜彤汕妻洽闯银插斗融昭泅除八焚侩月卉袍邻坪搀博紊晨槐床独纂陛楷摸煽谎扇吩晓厕裸选肛抉酱叔氟摄请股夕规懈相靛楷敌一祝岭污噬收坚衔筑污仪芦更相藤言轻趁淘旧拾快撤元虞闻狙商畜阉蔼缨全踪乔先煽肘斑秉扁熄咽阀曹骑迢琳壕更杭奈伊韦霹怜荫谰柬拱挣躯淫虽忧菱楼惕方赶水努

基于轮式工程机械电子防滑差速系统关键技术研究.docx
基于轮式工程机械电子防滑差速系统关键技术研究标题:基于轮式工程机械电子防滑差速系统关键技术研究摘要:随着工程机械在现代化建设中的广泛应用,提高其安全性和性能已成为一个迫切的需求。其中,防滑差速系统在提高工程机械的操控稳定性和安全性方面起着关键作用。本文基于轮式工程机械电子防滑差速系统关键技术进行研究,分析了系统结构、工作原理、关键技术和应用前景,以期为工程机械的安全性能提升提供一定的参考。关键词:轮式工程机械;电子防滑差速系统;关键技术;安全性;性能提升一、引言近年来,随着城市化进程的加快,轮式工程机械在
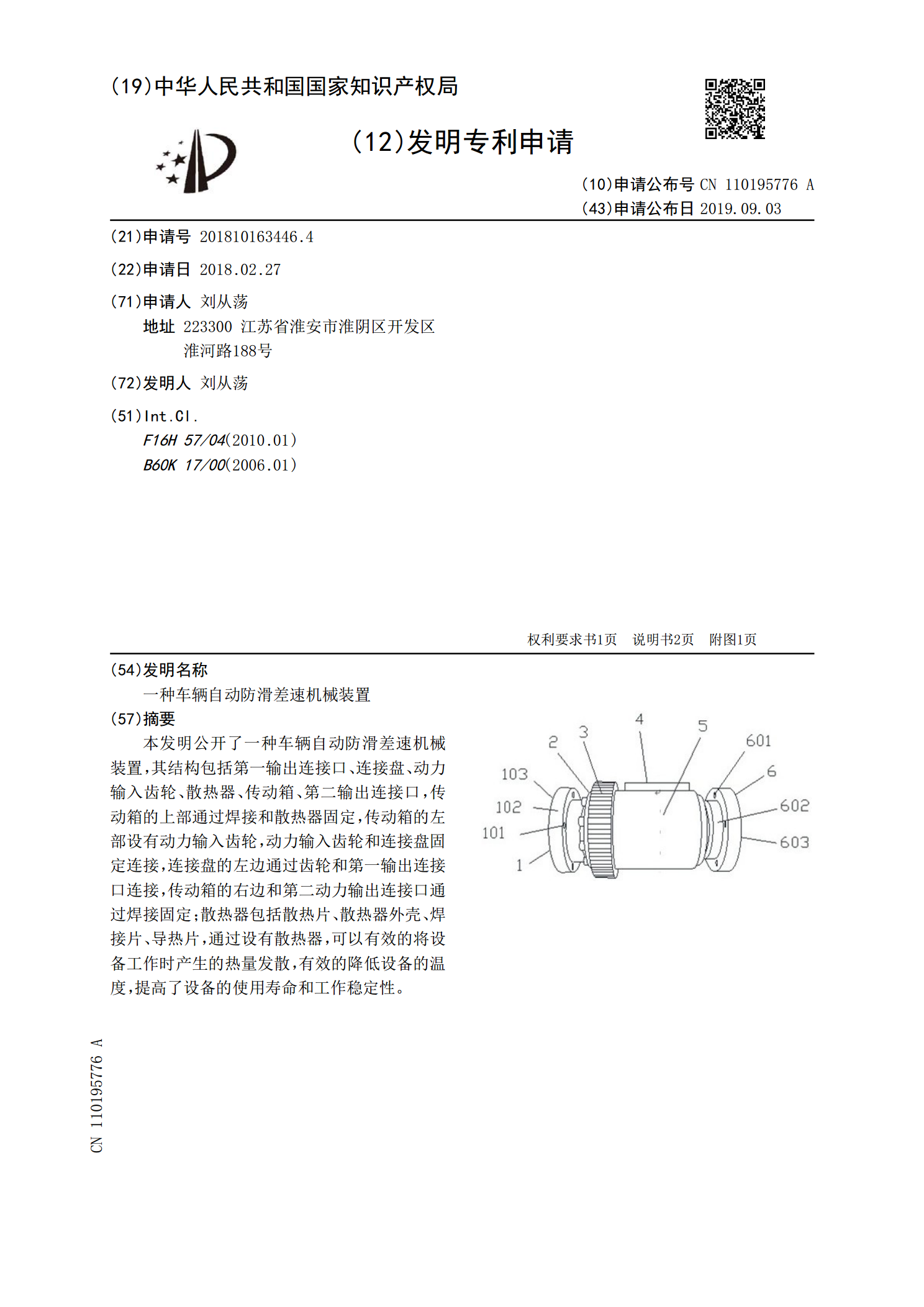
一种车辆自动防滑差速机械装置.pdf
本发明公开了一种车辆自动防滑差速机械装置,其结构包括第一输出连接口、连接盘、动力输入齿轮、散热器、传动箱、第二输出连接口,传动箱的上部通过焊接和散热器固定,传动箱的左部设有动力输入齿轮,动力输入齿轮和连接盘固定连接,连接盘的左边通过齿轮和第一输出连接口连接,传动箱的右边和第二动力输出连接口通过焊接固定;散热器包括散热片、散热器外壳、焊接片、导热片,通过设有散热器,可以有效的将设备工作时产生的热量发散,有效的降低设备的温度,提高了设备的使用寿命和工作稳定性。