
软地面智能气垫车自主导航研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

软地面智能气垫车自主导航研究的综述报告.docx
软地面智能气垫车自主导航研究的综述报告智能气垫车是一种能够在软地面自由行驶的机器人,其主要特点是具备较强的承载能力和适应性,可以适应泥沼等软土地形条件,满足人工操作或机动车难以完成的任务。然而,由于软土地形条件的复杂性和不确定性,气垫车在自主导航方面仍存在许多挑战,如导航精度、路径规划、动态障碍物避障等。本文将对近年来软地面智能气垫车自主导航研究的进展情况进行综述。一、导航技术在软土地面行驶时,气垫车需要准确地知道自身的位置和环境信息,并根据此信息规划行驶路径。传统的导航方法,如GPS和惯性导航等,在软土

软地面半履带气垫车姿态控制研究任务书.docx
软地面半履带气垫车姿态控制研究任务书一、研究背景半履带气垫车是一种能够在软地面上行驶的特种车辆,由于其专门用于在沙漠、泥泞的地形中行驶,所以具有越野能力强、通过性好、载荷能力高、稳定性好等优点,广泛应用于油田、农业、工程机械等领域。然而,半履带气垫车的姿态控制一直是研究的难点。因为软地面的复杂地形,行驶的稳定性、平稳性以及悬挂稳定性都会受到影响,如果不及时进行姿态控制,就容易导致车辆失控、侧翻等意外情况的发生,对人身和财产造成极大的伤害。因此,研究半履带气垫车的姿态控制技术,对于提高其行驶的稳定性和安全性

基于单目视觉反馈的智能车导航研究的综述报告.docx
基于单目视觉反馈的智能车导航研究的综述报告随着智能化技术的发展,自动驾驶汽车成为了近年来的热门研究领域之一。自动驾驶需要实时获得道路、车辆、行人等信息,以及进行决策和路径规划,而这些任务都依赖于视觉感知技术。在自动驾驶汽车中,视觉感知技术的一项重要任务是实现车道线检测和车道保持,其中,基于单目视觉反馈的车道保持技术日益受到人们的重视。基于单目视觉反馈的车道保持技术利用车载摄像头获得道路图像,通过对图像信息的处理,提取出道路中的车道线和车辆当前位置,然后通过对车道线和车辆位置的比较,控制汽车沿着预定轨迹行驶

校园场景下智能车的自主导航系统设计的开题报告.docx
校园场景下智能车的自主导航系统设计的开题报告一、选题背景随着物联网技术和智能化技术的不断发展,自主导航技术逐渐成为了当前热门的研究方向之一。智能车的自主导航系统是其中的一项重要应用。在校园场景下,智能车的自主导航系统可以帮助学生、教职工等人群方便快捷地到达目的地,规划最优路径,提高出行效率,同时也可以减少交通事故的发生。二、研究目的和意义本项目旨在研究校园场景下智能车的自主导航系统,设计出一种能够实现在不确定环境中的自主行驶的智能车,并通过实验验证其可行性。该系统将具有实时感知、环境建模、路径规划和控制等
一种农用自主导航的智能无人打药车及导航方法.pdf
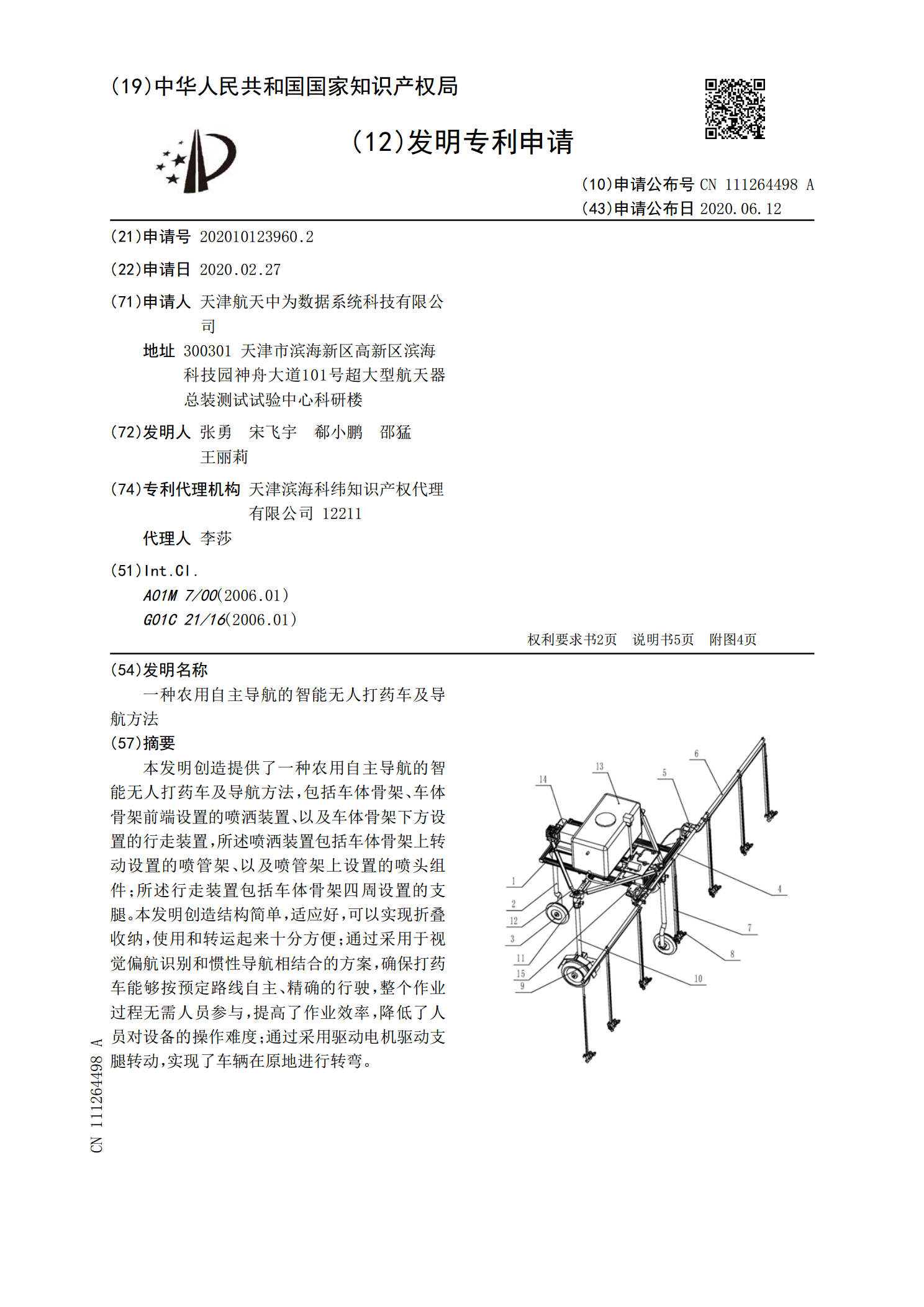
本发明创造提供了一种农用自主导航的智能无人打药车及导航方法,包括车体骨架、车体骨架前端设置的喷洒装置、以及车体骨架下方设置的行走装置,所述喷洒装置包括车体骨架上转动设置的喷管架、以及喷管架上设置的喷头组件;所述行走装置包括车体骨架四周设置的支腿。本发明创造结构简单,适应好,可以实现折叠收纳,使用和转运起来十分方便;通过采用于视觉偏航识别和惯性导航相结合的方案,确保打药车能够按预定路线自主、精确的行驶,整个作业过程无需人员参与,提高了作业效率,降低了人员对设备的操作难度;通过采用驱动电机驱动支腿转动,实现了