
一种农用自主导航的智能无人打药车及导航方法.pdf

努力****弘毅

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种农用自主导航的智能无人打药车及导航方法.pdf
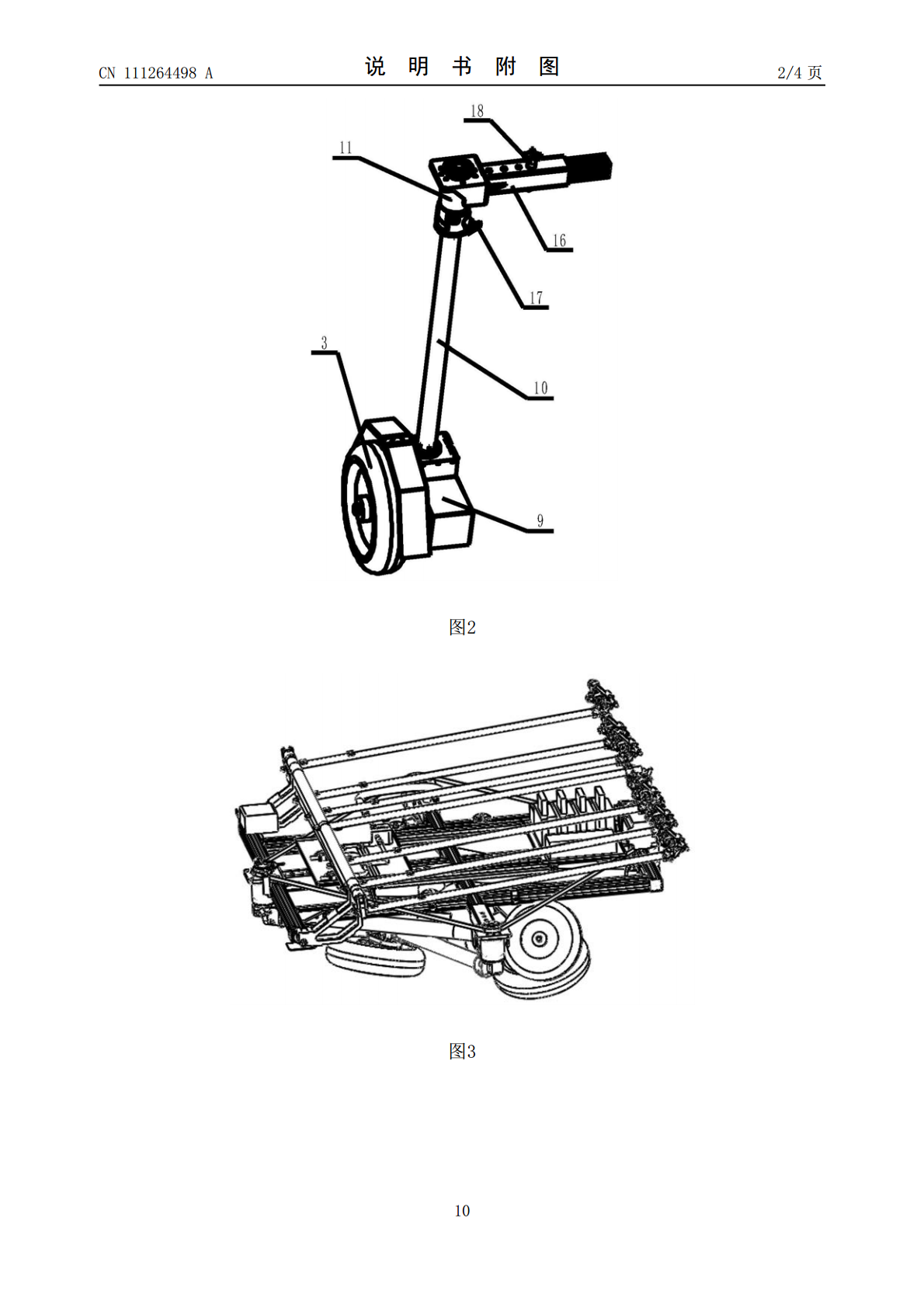
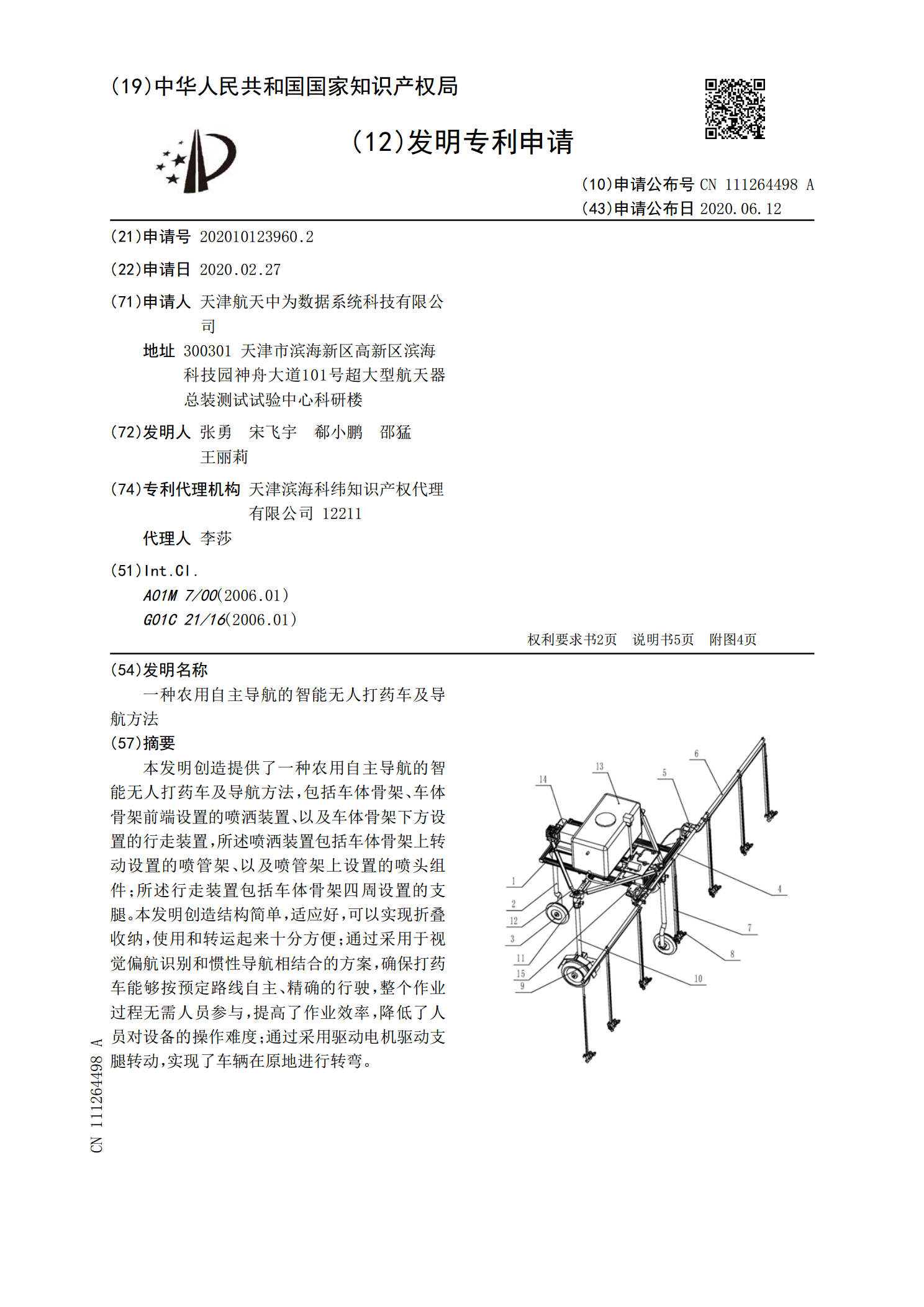
本发明创造提供了一种农用自主导航的智能无人打药车及导航方法,包括车体骨架、车体骨架前端设置的喷洒装置、以及车体骨架下方设置的行走装置,所述喷洒装置包括车体骨架上转动设置的喷管架、以及喷管架上设置的喷头组件;所述行走装置包括车体骨架四周设置的支腿。本发明创造结构简单,适应好,可以实现折叠收纳,使用和转运起来十分方便;通过采用于视觉偏航识别和惯性导航相结合的方案,确保打药车能够按预定路线自主、精确的行驶,整个作业过程无需人员参与,提高了作业效率,降低了人员对设备的操作难度;通过采用驱动电机驱动支腿转动,实现了

基于北斗的农用无人机自主导航方法研究的中期报告.docx
基于北斗的农用无人机自主导航方法研究的中期报告一、研究背景随着现代科技的发展和农业生产的不断升级,农用无人机技术也逐渐得到广泛应用。无人机具有高效、快速、便捷、经济的特点,已成为农业生产中一种重要的工具。北斗卫星定位系统是中国自主建设的全球卫星导航系统,具有高精度、高稳定性、高可靠性和全天候可用等特点。结合北斗卫星导航系统,实现农用无人机的自主导航,可以大大提高农业生产效率,降低人力成本,优化农业生产结构,改善生态环境。因此,本研究旨在探究基于北斗的农用无人机自主导航方法,为高效、智能的农业生产提供技术支
一种用于表型检测无人车的自主导航方法及装置.pdf
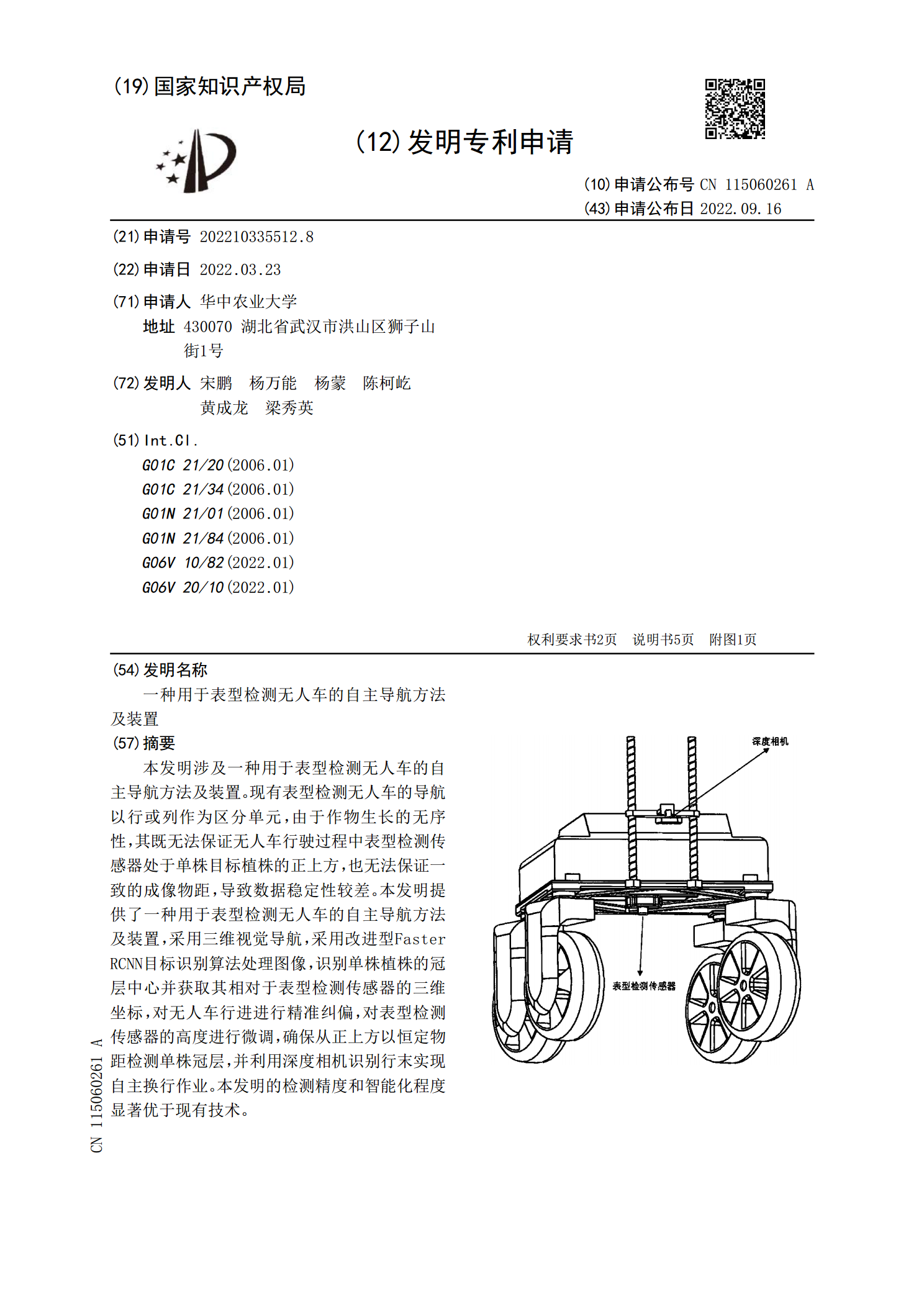
本发明涉及一种用于表型检测无人车的自主导航方法及装置。现有表型检测无人车的导航以行或列作为区分单元,由于作物生长的无序性,其既无法保证无人车行驶过程中表型检测传感器处于单株目标植株的正上方,也无法保证一致的成像物距,导致数据稳定性较差。本发明提供了一种用于表型检测无人车的自主导航方法及装置,采用三维视觉导航,采用改进型FasterRCNN目标识别算法处理图像,识别单株植株的冠层中心并获取其相对于表型检测传感器的三维坐标,对无人车行进进行精准纠偏,对表型检测传感器的高度进行微调,确保从正上方以恒定物距检测

无人车自主定位与导航研究的任务书.docx
无人车自主定位与导航研究的任务书任务书一、研究背景目前自动驾驶技术在全球范围内处于快速发展的阶段。无人车是其中的一个重要应用领域,其核心是自主定位和导航技术。无人车的自主定位和导航技术研究,将有助于实现无人车的真正普及和应用。同时,无人车也可以应用在许多领域,如环境监测、农业、灾害救援等,为人们生活带来更多便利。二、研究目标本研究旨在解决无人车在自主定位和导航方面的核心技术问题,建立一套可靠、高效、安全的自主定位和导航系统,为无人车普及和应用奠定技术基础。三、研究任务(一)技术路线1.研究无人车自主定位和

无人搬运车导航控制系统及其导航控制方法.pdf
本发明公开了一种无人搬运车导航控制系统及其导航控制方法,无人搬运车导航控制系统包括有中央控制器,设置于每个无人搬运车上且与中央控制器连接的分控制器,以及设置于每个无人搬运车上且分别与对应的分控制器连接的QR码定位系统、网格路径导航系统和货物登记系统。本发明采用QR采集传感技术采集仓库内无人搬运车的坐标信息,方便统一监控管理;采用网格路径导航系统,判断无人搬运车实际运行和预定轨迹的偏差,从而调整两轮差动底盘,进行轨迹补偿,保证了无人搬运车按规划的路径行驶。本发明结构简单、安装方便,且便于无人搬运车的导航运输