
柑橘采摘机器人末端执行器研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柑橘采摘机器人末端执行器研究的综述报告.docx
柑橘采摘机器人末端执行器研究的综述报告随着科技的不断发展,机器人技术也在不断地发展。机器人被广泛应用于各个领域。其中,柑橘采摘行业也不例外,由于柑橘果实的受伤率较高,为了保证采摘的效率和质量,柑橘采摘机器人被广泛研发和应用。而柑橘采摘机器人中的末端执行器则是机器人具备柑橘采摘能力的关键部件,这篇综述报告将对柑橘采摘机器人末端执行器的研究进行分析。首先,柑橘采摘机器人末端执行器的研发目标是确保柑橘果实不受损伤,同时还能够确保采摘效率和准确性。末端执行器需要能够提供各种采摘力度和方向,同时具备柔软性、轻量化和

柑橘采摘机器人末端执行器研究.pdf
浙江工业大学硕士学位论文柑橘采摘机器人末端执行器研究作者姓名:张水波指导教师:张立彬教授、杨庆华教授浙江工业大学机械工程学院2011年4月DissertationSubmittedtoZhejiangUniVersi时of1’echnologyfortheDegreeofMasterResearchonEnd.EffectorofCitrusHarvestingRobotCandidate:ZhangShuiboAdVisor:Pro£ZhangLibin&YrangQinghuaCollegeofMec

柑橘采摘机器人末端执行器研究.docx
柑橘采摘机器人末端执行器研究标题:柑橘采摘机器人末端执行器研究摘要:随着农业机械化的快速发展,柑橘采摘机器人作为一项新兴技术受到了广泛的关注。作为柑橘采摘机器人的关键部件之一,末端执行器的设计与功能直接关系到机器人的采摘性能和效率。本文通过综合分析当前柑橘采摘机器人末端执行器的研究现状和存在的问题,探讨了提高机器人的采摘性能的关键技术,包括机械结构设计、传动系统、感知与控制等方面。同时,通过实验验证了优化设计的末端执行器的可行性和性能。研究结果表明,末端执行器的设计对柑橘采摘机器人的性能和效率具有重要影响
一种柑橘采摘机器人的末端执行器.pdf
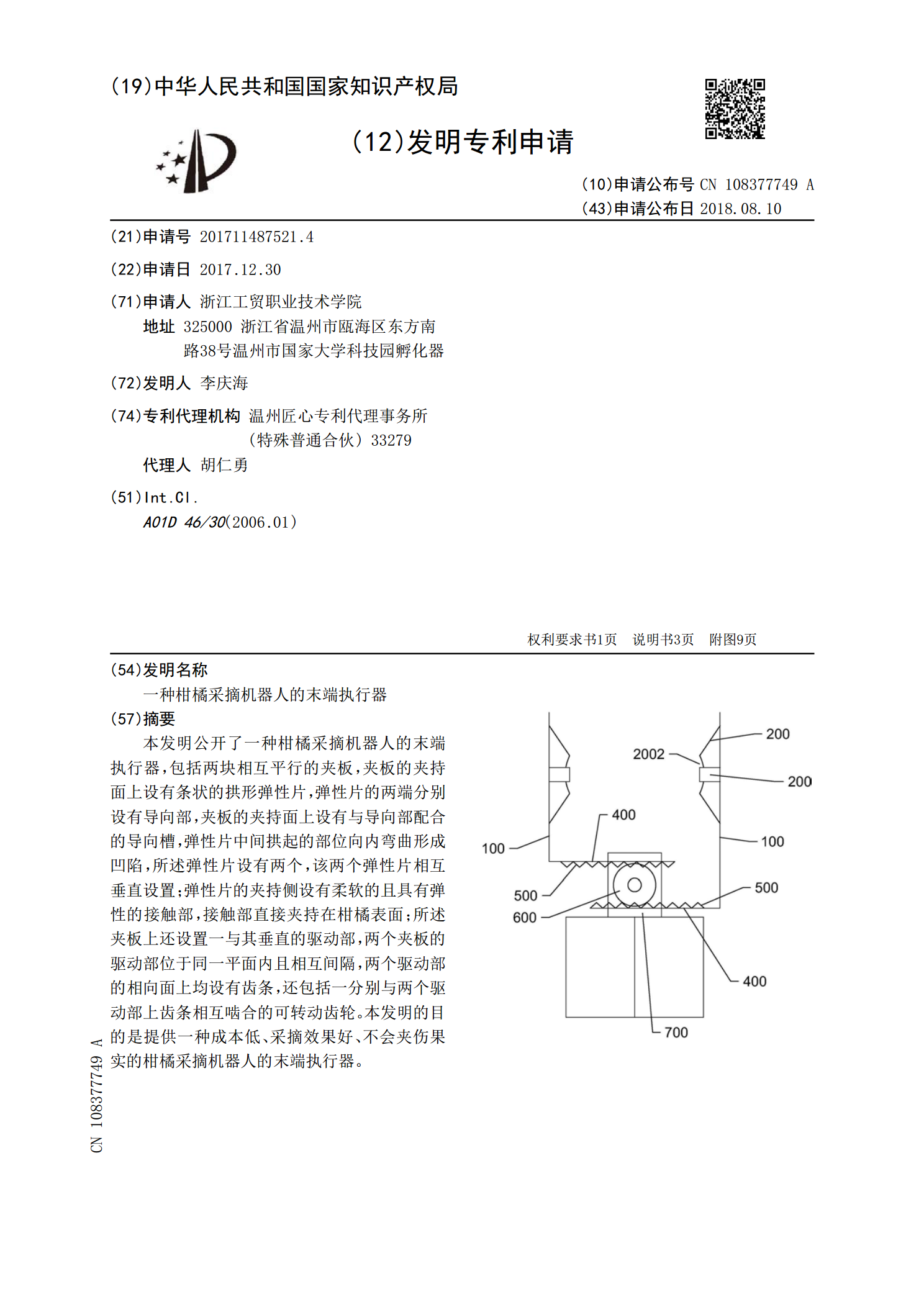
本发明公开了一种柑橘采摘机器人的末端执行器,包括两块相互平行的夹板,夹板的夹持面上设有条状的拱形弹性片,弹性片的两端分别设有导向部,夹板的夹持面上设有与导向部配合的导向槽,弹性片中间拱起的部位向内弯曲形成凹陷,所述弹性片设有两个,该两个弹性片相互垂直设置;弹性片的夹持侧设有柔软的且具有弹性的接触部,接触部直接夹持在柑橘表面;所述夹板上还设置一与其垂直的驱动部,两个夹板的驱动部位于同一平面内且相互间隔,两个驱动部的相向面上均设有齿条,还包括一分别与两个驱动部上齿条相互啮合的可转动齿轮。本发明的目的是提供一种

苹果采摘机器人末端执行器的设计与研究的开题报告.docx
苹果采摘机器人末端执行器的设计与研究的开题报告一、选题背景随着国家在农业领域大力发展智能化技术,农业生产方式也正在发生着巨大转变。采摘机器人作为智能化农业技术的代表,成为了人们极为关注的研究课题之一。尤其是在苹果采摘领域,其高强度、高危险性使得机械化采摘的需求日益增加。本课题旨在研究设计基于末端执行器的苹果采摘机器人,以提高农业生产效率和保障采摘工人的安全。二、研究内容本课题主要研究内容包括:1.苹果采摘机器人的工作原理和系统结构设计;2.基于末端执行器的苹果采摘机器人末端执行器设计;3.末端执行器控制系