
复杂卫星快速机动时的姿态控制工程的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

复杂卫星快速机动时的姿态控制工程的中期报告.docx
复杂卫星快速机动时的姿态控制工程的中期报告1.研究背景及意义随着卫星应用范围的不断扩大,卫星的机动性能要求也越来越高,例如,对于地球观测卫星,需要针对不同的目标区域进行快速姿态调整;对于通信卫星,需要在传输过程中保持对地通信信号的最优质量等等。此外,在太空交通领域,卫星也需要进行复杂的机动以避免碰撞或与其他卫星进行对接等任务。因此,对于卫星进行快速机动时的姿态控制工程的研究具有重要的意义。本文旨在介绍该领域的中期研究进展并提出未来的研究方向。2.研究进展目前,对于卫星进行快速机动时的姿态控制工程的研究主要

复杂卫星快速机动时的姿态控制工程.docx
复杂卫星快速机动时的姿态控制工程标题:复杂卫星快速机动时的姿态控制工程摘要:随着卫星技术的不断发展,卫星的任务越来越复杂,需要实现更精确的机动能力。本文针对复杂卫星快速机动时的姿态控制问题进行研究,分析了姿态控制的重要性和挑战。然后,从传统控制方法到现代控制方法的发展,介绍了一些常用的姿态控制技术。最后,提出了一种基于模型预测控制的姿态控制方案,并通过数值仿真验证算法的有效性。一、引言随着卫星技术的不断发展,卫星的任务越来越复杂,需要实现更精确的机动能力。卫星的姿态控制是保证其正常运行的重要基础。复杂卫星

复杂卫星快速机动时的姿态控制工程的任务书.docx
复杂卫星快速机动时的姿态控制工程的任务书任务书:任务名称:复杂卫星快速机动时的姿态控制工程任务背景:卫星是人类探索宇宙和使用空间资源的重要工具。随着技术的发展,卫星的应用范围越来越广,功能越来越强大。在卫星的运行过程中,姿态控制是一项关键的工程技术。对于某些需要快速机动的卫星而言,姿态控制更是至关重要。任务目标:本项目的任务目标是针对复杂卫星快速机动时的姿态控制问题,设计并实现一套高精度、高稳定性的姿态控制系统。该系统能够快速响应卫星的姿态变化,有效控制卫星的姿态稳定,保证卫星的正常运行。任务内容:1.对

快速机动卫星质量矩姿态控制技术研究.docx
快速机动卫星质量矩姿态控制技术研究快速机动卫星质量矩姿态控制技术研究摘要:快速机动卫星是一种能够快速变换自身运动状态的卫星,具有快速机动、高灵活性和能够应对复杂任务的能力。在卫星实际应用中,为了稳定姿态、提高定位精度和满足任务要求,质量矩姿态控制技术起着关键作用。本论文主要研究了快速机动卫星质量矩姿态控制技术的原理、方法及其应用。关键词:快速机动卫星;质量矩姿态控制;原理;方法;应用一、引言近年来,卫星技术的发展日益迅速,对卫星的要求也越来越高。快速机动卫星是一种具备快速机动能力的卫星,其具有极高的机动性
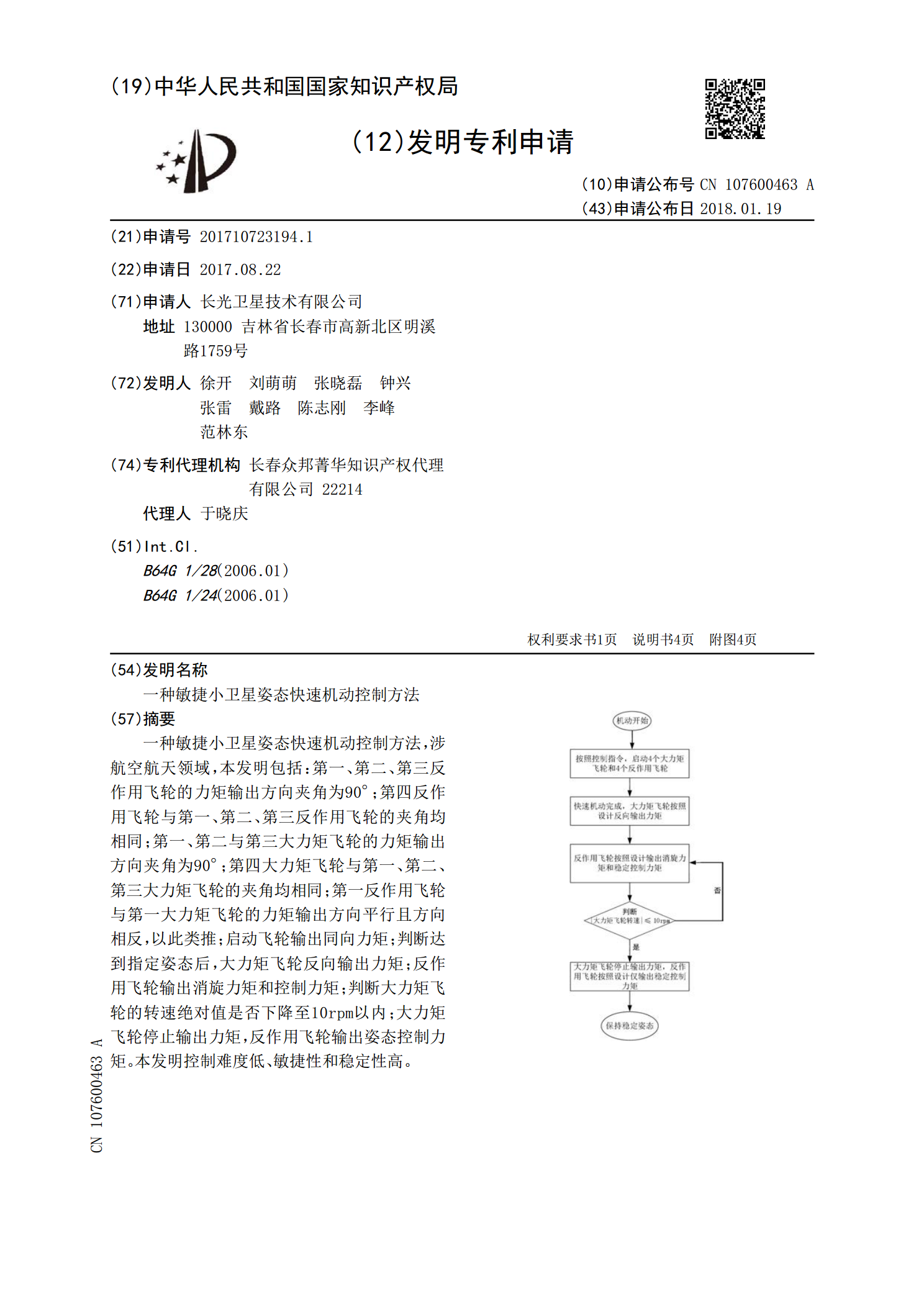
一种敏捷小卫星姿态快速机动控制方法.pdf
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力