
基于MATLAB的PID参数整定算法的仿真研究.doc

运升****魔王

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于MATLAB的PID参数整定算法的仿真研究.doc
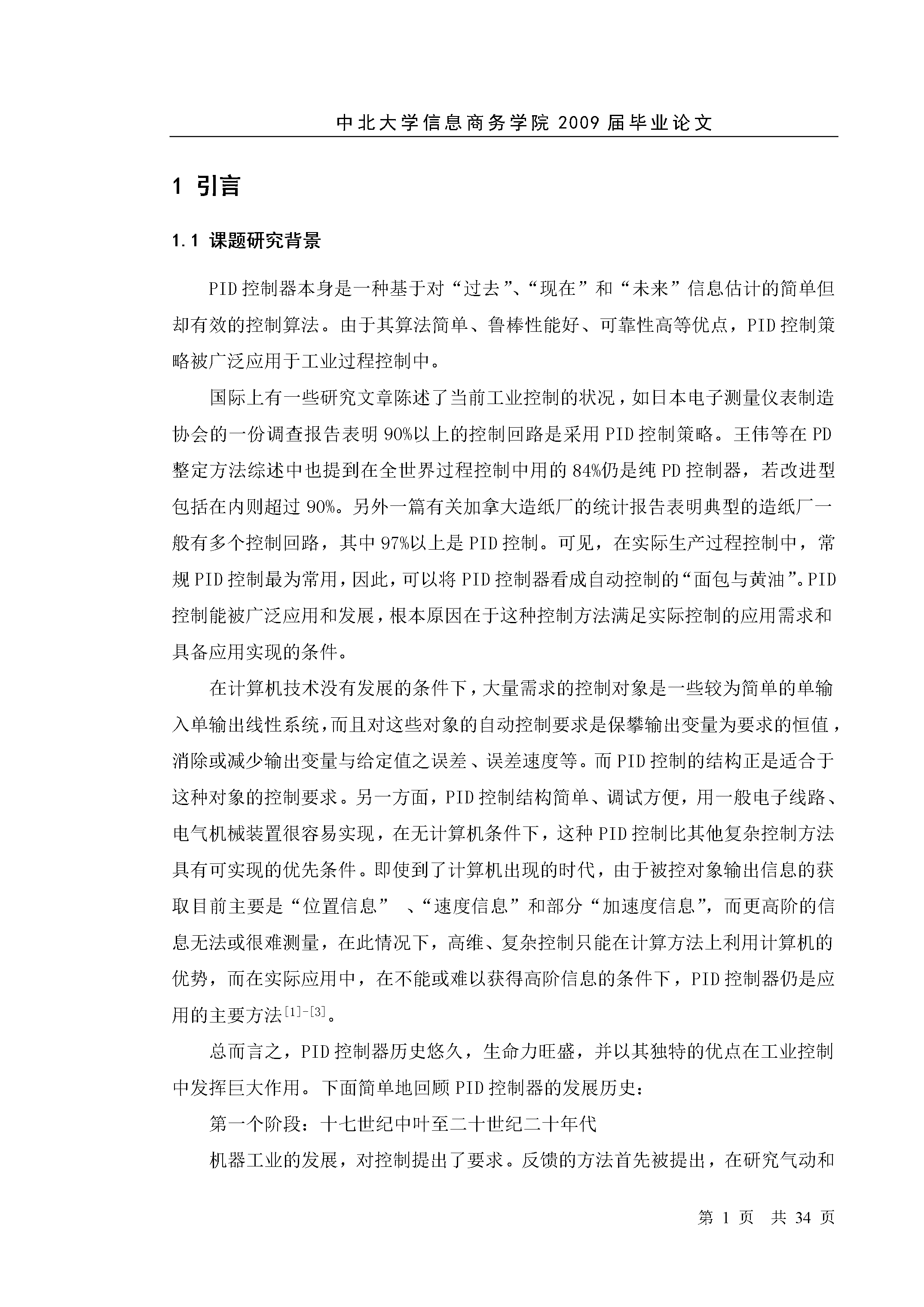
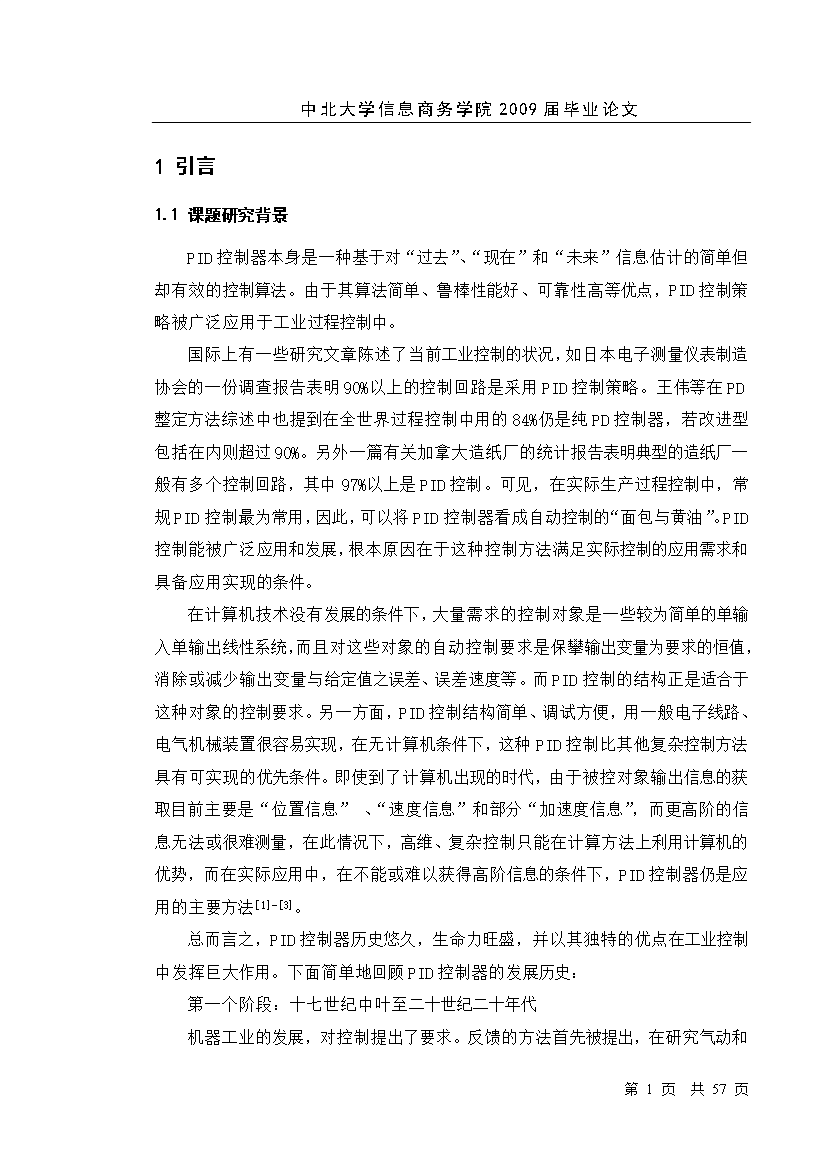
中北大学信息商务学院2009届毕业论文1引言1.1课题研究背景PID控制器本身是一种基于对“过去”、“现在”和“未来”信息估计的简单但却有效的控制算法。由于其算法简单、鲁棒性能好、可靠性高等优点PID控制策略被广泛应用于工业过程控制中。国际上有一些研究文章陈述了当前工业控制的状况如日本电子测量仪表制造协会的一份调查报告表明90%以上的控制回路是采用PID控制策略。王伟等在PD整定方法综述中也提到在全世界过程控制中用的84%仍是纯PD控制器若改进型包括在内则超过90%。另外一
基于MATLAB的PID参数整定算法的仿真研究.doc
中北大学信息商务学院2009届毕业论文1引言1.1课题研究背景PID控制器本身是一种基于对“过去”、“现在”和“未来”信息估计的简单但却有效的控制算法。由于其算法简单、鲁棒性能好、可靠性高等优点PID控制策略被广泛应用于工业过程控制中。国际上有一些研究文章陈述了当前工业控制的状况如日本电子测量仪表制造协会的一份调查报告表明90%以上的控制回路是采用PID控制策略。王伟等在PD整定方法综述中也提到在全世界过程控制中用的84%仍是纯PD控制器若改进型包括在内则超过90%。另外一
基于MATLAB的PID参数整定算法的仿真研究.doc
中北大学信息商务学院2009届毕业论文1引言1.1课题研究背景PID控制器本身是一种基于对“过去”、“现在”和“未来”信息估计的简单但却有效的控制算法。由于其算法简单、鲁棒性能好、可靠性高等优点PID控制策略被广泛应用于工业过程控制中。国际上有一些研究文章陈述了当前工业控制的状况如日本电子测量仪表制造协会的一份调查报告表明90%以上的控制回路是采用PID控制策略。王伟等在PD整定方法综述中也提到在全世界过程控制中用的84%仍是纯PD控制器若改进型包括在内则超过90%。另外一
基于MATLAB的PID参数整定算法的仿真研究 精品资料.doc
中北大学信息商务学院2009届毕业论文1引言1.1课题研究背景PID控制器本身是一种基于对“过去”、“现在”和“未来”信息估计的简单但却有效的控制算法。由于其算法简单、鲁棒性能好、可靠性高等优点,PID控制策略被广泛应用于工业过程控制中。国际上有一些研究文章陈述了当前工业控制的状况,如日本电子测量仪表制造协会的一份调查报告表明90%以上的控制回路是采用PID控制策略。王伟等在PD整定方法综述中也提到在全世界过程控制中用的84%仍是纯PD控制器,若改进型包括在内则超过90%。另外一篇有关加拿

基于MATLAB Simulink的PID参数整定.docx
基于MATLAB/Simulink的PID参数整定摘要:针对PID参数整定过程的复杂性,基于MATLAB/Simulink仿真环境,模拟临界比例度法PID参数整定的方法和步骤,给出了一种简单有效的PID参数整定方法。与通常的整定方法比较,其优点是非常直观、可以随意修改仿真参数,节省了大量的计算和编程工作量。通过仿真实例验证了该方法的有效性。关键词:PID控制;参数整定;MATLAB/Simulink;临界比例度法Abstract:ThePIDtuningisacomplicatedprocess.Toso