
基于驾驶员模型的汽车防侧翻控制研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于驾驶员模型的汽车防侧翻控制研究的中期报告.docx
基于驾驶员模型的汽车防侧翻控制研究的中期报告1.研究背景和意义侧翻是一种严重的汽车事故类型,特别是对于高速行驶的大型货车和客车而言,侧翻事故的危害更为显著。为了减少车辆侧翻事故的发生,需要对车辆的防侧翻控制系统进行研究和开发。传统的防侧翻控制方法主要基于车辆本身的动力学和几何特性进行设计,但是这种方法存在一些不足,例如无法考虑驾驶员的人机交互,无法对驾驶员的行为进行预测和干预。因此,本研究旨在基于驾驶员模型,设计一种更加智能化和人性化的汽车防侧翻控制系统,提高车辆的安全性和驾驶舒适性。2.研究内容和方法本

基于驾驶员模型的汽车防侧翻控制研究的开题报告.docx
基于驾驶员模型的汽车防侧翻控制研究的开题报告一、研究背景在车辆行驶过程中,侧翻是一种严重的安全隐患。特别是针对SUV、皮卡等高车身车型,在过弯、行驶在高速公路、山区等复杂路况下容易发生侧翻意外。在过去的研究中,已经有很多针对侧翻控制的相关研究,如采用传感器等硬件进行车辆侧翻预测等。然而,这些方法存在着高成本、耗能量大等问题,无法满足实际应用需求。因此,本研究将结合驾驶员行为及其对车辆的影响,探寻一种根据驾驶员模型的汽车侧翻控制方法,以提高车辆侧翻控制的准确性和普适性。二、研究目标本研究的主要目标是设计一种

基于驾驶员模型的汽车防侧翻控制研究的任务书.docx
基于驾驶员模型的汽车防侧翻控制研究的任务书任务书题目:基于驾驶员模型的汽车防侧翻控制研究1.研究背景随着汽车行业的发展和人们对于行车安全的要求越来越高,汽车防侧翻控制技术成为汽车行业的一个重要研究领域。侧翻事故是相对常见的车祸类型之一,其中不可避免的因素包括路况、车辆本身的动力学特性以及驾驶员的操作。因此,对于汽车防侧翻控制技术的研究具有十分重要的意义。2.研究目的本研究旨在基于驾驶员模型,开展汽车防侧翻控制技术的探讨,具体目的为:1)总结近年来防侧翻技术研究的现状和问题;2)构建基于驾驶员模型的汽车侧翻

基于差动制动技术的汽车防侧翻控制研究的中期报告.docx
基于差动制动技术的汽车防侧翻控制研究的中期报告【摘要】汽车侧翻事故在道路交通事故中属于较为严重的一种,因此如何防止汽车侧翻事故发生成为一个热门的研究课题。本研究通过对汽车侧翻力学模型分析,设计了一种基于差动制动技术的汽车防侧翻控制系统。通过理论分析和计算机仿真,该系统能够在保证行驶稳定性和舒适性的前提下实现对车辆侧翻角度的有效控制。【关键词】汽车侧翻控制;差动制动技术;力学模型;仿真【引言】汽车侧翻事故在道路交通事故中属于较为严重的一种,具有突发性和严重性,往往会导致车辆和乘车人员的重大损失。因此,如何防
基于驾驶员输入预测的汽车防侧翻系统及控制策略.pdf
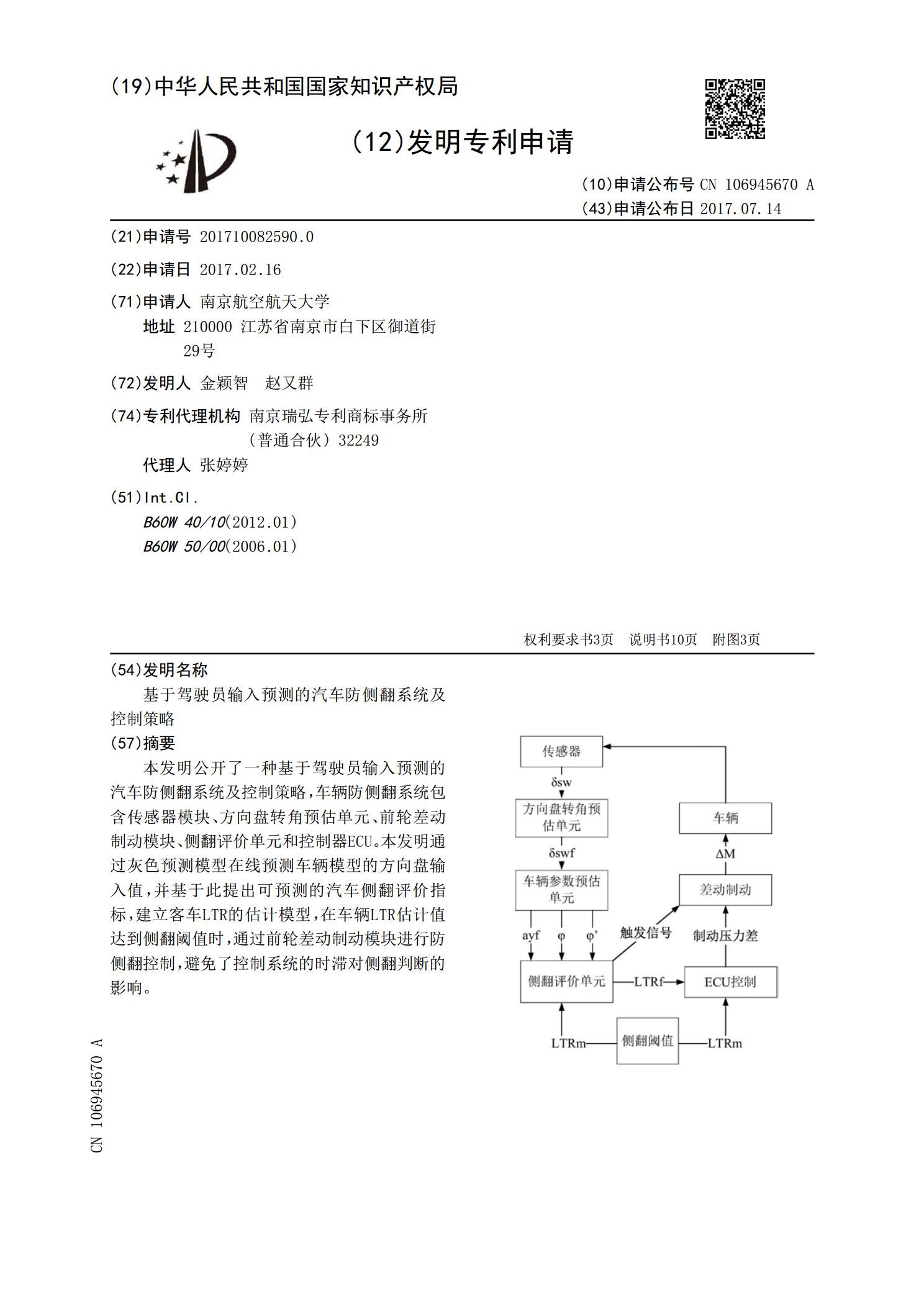
本发明公开了一种基于驾驶员输入预测的汽车防侧翻系统及控制策略,车辆防侧翻系统包含传感器模块、方向盘转角预估单元、前轮差动制动模块、侧翻评价单元和控制器ECU。本发明通过灰色预测模型在线预测车辆模型的方向盘输入值,并基于此提出可预测的汽车侧翻评价指标,建立客车LTR的估计模型,在车辆LTR估计值达到侧翻阈值时,通过前轮差动制动模块进行防侧翻控制,避免了控制系统的时滞对侧翻判断的影响。