
智能轮椅的向导路径预测方法的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能轮椅的向导路径预测方法的综述报告.docx
智能轮椅的向导路径预测方法的综述报告智能轮椅是一种集成了多种智能技术的辅助性生活设备,旨在提升行动不便人士的生活质量。其中,向导路径预测方法是智能轮椅的核心技术之一,其准确度和实时性直接关系到用户的使用体验和安全。本综述将对当前智能轮椅向导路径预测方法进行分析和总结,探讨其优缺点及未来发展趋势。首先,目前智能轮椅向导路径预测方法主要包括基于传感器技术和机器学习技术两类。前者主要通过安装在智能轮椅上的各类传感器,如激光雷达、红外传感器、加速度计等,获取周围环境的信息,并通过算法进行处理,预测出合理的行驶路径

智能轮椅的向导路径预测方法的任务书.docx
智能轮椅的向导路径预测方法的任务书一、任务背景人类社会的老龄化问题日趋凸显,随之而来的是对于智能化养老设备的需求不断增加。其中,智能轮椅是一种非常有前景的设备,可以帮助老年及残疾人群体更好地融入社会,平等享受生活。然而,在使用智能轮椅时,路线的选择对于用户的需求和行动能力具有很大影响,智能化的轮椅需要具备向导路径预测的能力,为用户提供更好的服务。二、任务目标本任务旨在研究智能轮椅的向导路径预测方法,提高智能轮椅在路线选择和服务性能方面的智能化程度,从而更好地服务于老年人和残疾人群体。三、任务内容1.探究智
智能轮椅及智能轮椅的控制方法.pdf
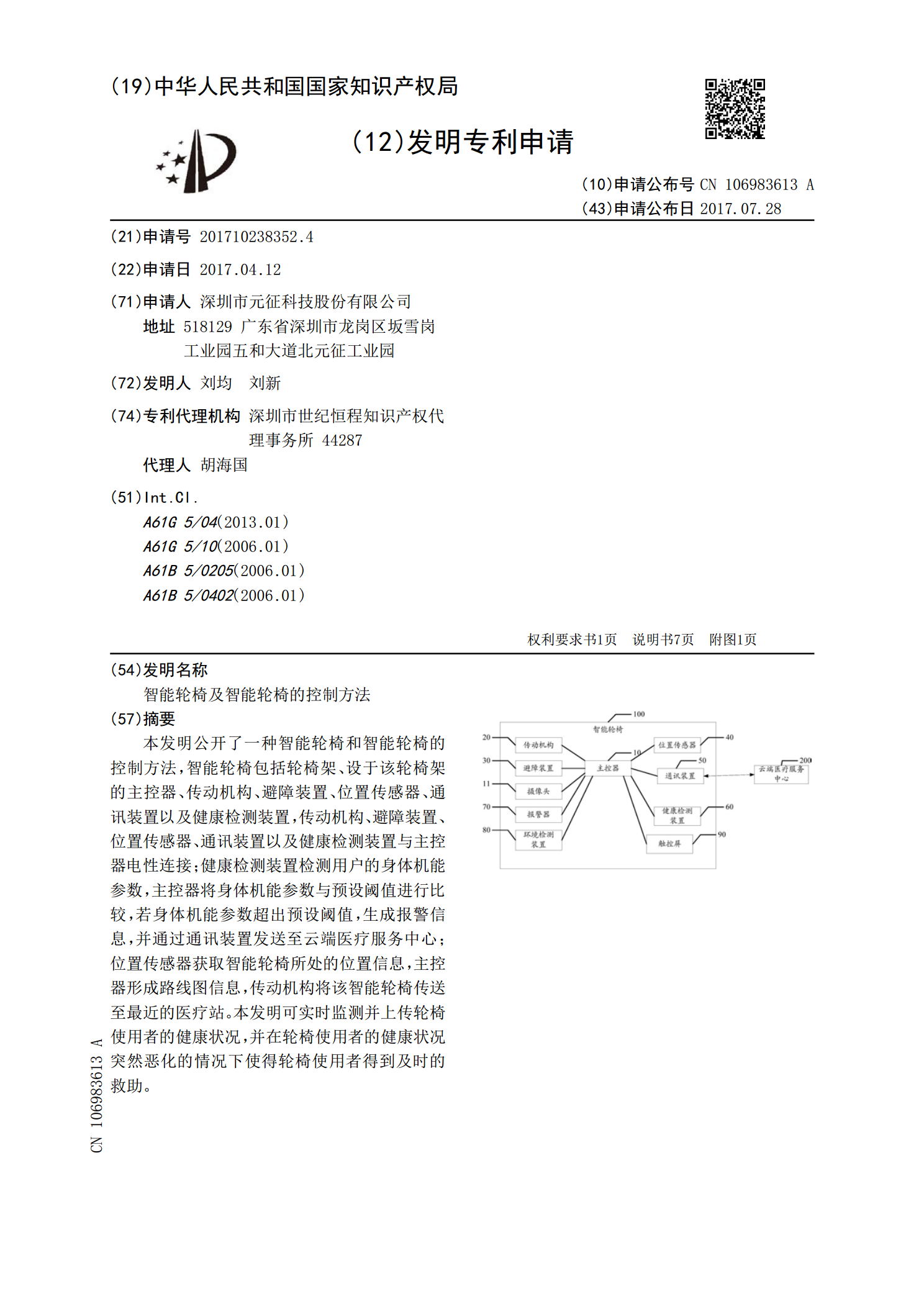
本发明公开了一种智能轮椅和智能轮椅的控制方法,智能轮椅包括轮椅架、设于该轮椅架的主控器、传动机构、避障装置、位置传感器、通讯装置以及健康检测装置,传动机构、避障装置、位置传感器、通讯装置以及健康检测装置与主控器电性连接;健康检测装置检测用户的身体机能参数,主控器将身体机能参数与预设阈值进行比较,若身体机能参数超出预设阈值,生成报警信息,并通过通讯装置发送至云端医疗服务中心;位置传感器获取智能轮椅所处的位置信息,主控器形成路线图信息,传动机构将该智能轮椅传送至最近的医疗站。本发明可实时监测并上传轮椅使用者的

智能轮椅结构设计与研究的综述报告.docx
智能轮椅结构设计与研究的综述报告智能轮椅是一种智能化的辅助器具,可以协助失禁者或者行动不便者进行移动,但是轮椅的结构设计直接影响到了使用体验和智能化程度。因此,本文将对智能轮椅的结构设计进行综述和研究。一、座椅结构座椅是轮椅最常接触的部分,也是最易疲劳的部位。因此,优秀的座椅结构应该具有良好的舒适性、支撑性和耐久性。现代智能轮椅的座椅内部结构多采用钢管和铝合金框架设计,外部则采用优质布料,具有透气性和舒适性。此外,智能轮椅的座椅还应该能够支撑不同的体重,为不同的用户提供舒适的睡眠姿势和体位的转换功能,以及

智能感知轮椅的操控系统及智能轮椅的控制方法.pdf
智能感知轮椅的操控系统及智能轮椅的控制方法,涉及医疗机械领域,用于解决对轮椅自身信息的采集及控制问题,要点是包括操控器,所述操控器与计算机处理单元相接,所述计算机处理单元包括传感器模块、驱动模块和人机交互模块,所述传感器模块包括内部状态感知模块和外部环境状态感知模块,所述内部状态感知模块通过姿态传感器确定轮椅使用者的姿态信息,所述外部环境状态感知模块分别通过编码器的位移速度和距离获得自定位信息,效果是通过感知模块可以检测到轮椅上使用者的信息和外部环境的信息,进而便于轮椅自行判断前行路线,防止发生碰撞,利于