
基于GA的水下机器人多目标路径规划研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于GA的水下机器人多目标路径规划研究的综述报告.docx
基于GA的水下机器人多目标路径规划研究的综述报告水下机器人(AUV)是一种具有较高自主性能的水下机器人,广泛应用于水下海洋调查、海洋资源勘探等领域。近年来,针对其多目标路径规划问题,研究者们采用遗传算法(GA)进行了广泛研究。本文将从基本原理、应用领域、具体实现等方面综述基于GA的水下机器人多目标路径规划研究。一、基本原理遗传算法(GA)是一种基于生物遗传和进化原理的优化算法,因其适用于复杂问题、全局优化等特点被广泛应用。其实现流程包括以下步骤:1.初始化种群,将所有路径编码成二进制串,形成一个初始种群。

基于GA的水下机器人多目标路径规划研究的任务书.docx
基于GA的水下机器人多目标路径规划研究的任务书研究背景随着人类对海洋资源的不断挖掘,水下机器人在海洋领域中的应用越来越广泛。水下机器人可以在深海中进行探测,收集数据,进行勘探和拓展海底资源等多种任务。而水下机器人的多目标路径规划技术是其完成各项任务的重要前提。多目标路径规划技术可以有效地减少水下机器人的能耗和时间成本,提高任务效率,降低操作难度和失误率,具有广泛的应用前景。研究对象本研究将针对水下机器人进行多目标路径规划的相关问题展开研究。研究内容包括水下机器人多目标路径规划的基本原理、算法设计和实现等方
基于区间多目标优化的水下机器人全局路径规划方法.pdf
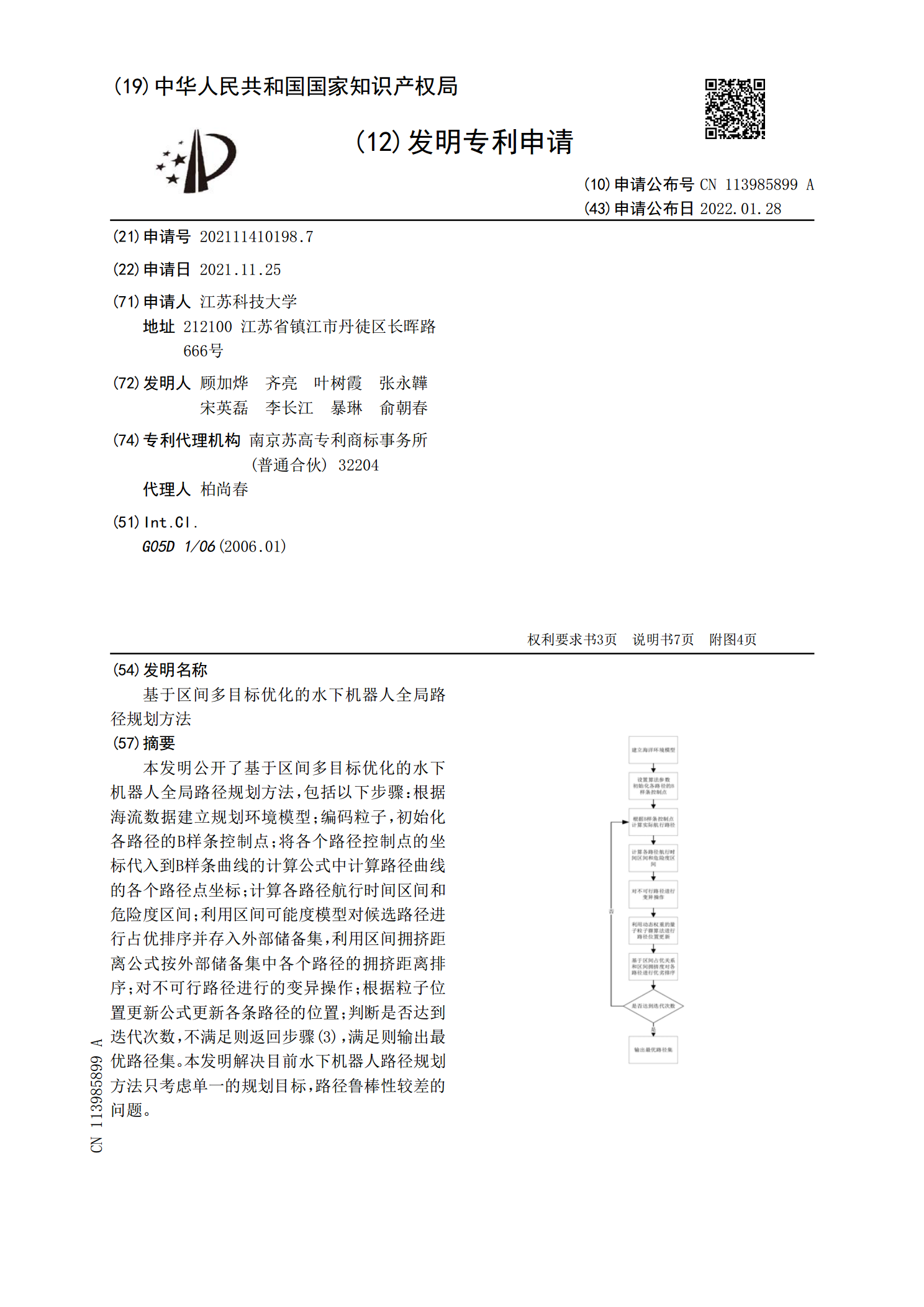
本发明公开了基于区间多目标优化的水下机器人全局路径规划方法,包括以下步骤:根据海流数据建立规划环境模型;编码粒子,初始化各路径的B样条控制点;将各个路径控制点的坐标代入到B样条曲线的计算公式中计算路径曲线的各个路径点坐标;计算各路径航行时间区间和危险度区间;利用区间可能度模型对候选路径进行占优排序并存入外部储备集,利用区间拥挤距离公式按外部储备集中各个路径的拥挤距离排序;对不可行路径进行的变异操作;根据粒子位置更新公式更新各条路径的位置;判断是否达到迭代次数,不满足则返回步骤(3),满足则输出最优路径集。

水下机器人路径规划与轨迹跟踪控制研究的综述报告.docx
水下机器人路径规划与轨迹跟踪控制研究的综述报告随着科学技术的不断进步,智能机器人技术得到了广泛的发展和应用,这其中就包括水下机器人。作为一种特殊类型的机器人,水下机器人在海洋调查、海洋资源勘探、海洋环保等领域具有广泛的应用前景。然而,水下机器人的路径规划和轨迹跟踪控制一直是水下机器人技术发展的重要研究方向。一、水下机器人路径规划技术综述水下机器人的路径规划技术是指机器人在执行任务时,根据任务需求和环境约束,寻找最优的运动轨迹以实现任务的完成。水下机器人路径规划的研究内容主要包括环境建模、机器人运动控制、路

基于MAS的多机器人路径规划研究的综述报告.docx
基于MAS的多机器人路径规划研究的综述报告随着机器人技术的发展,多机器人协作已成为机器人应用领域中的热点话题。多机器人协作能够提高任务完成效率、减少任务时间、增强任务的鲁棒性和扩大操作范围等多方面的优势。多机器人路径规划是多机器人协作中的一个重要问题,指的是如何合理地规划多个机器人的移动路径,使它们在执行任务过程中能够避免碰撞和冲突,以达到协同合作的目的。多机器人路径规划问题因为其NP难度和复杂性难以求解,因此,不同的求解算法在实际应用中也存在着一定的优缺点。其中,基于多智能体系统的路径规划方法(Mult