
基于区间多目标优化的水下机器人全局路径规划方法.pdf

梦影****主a


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于区间多目标优化的水下机器人全局路径规划方法.pdf
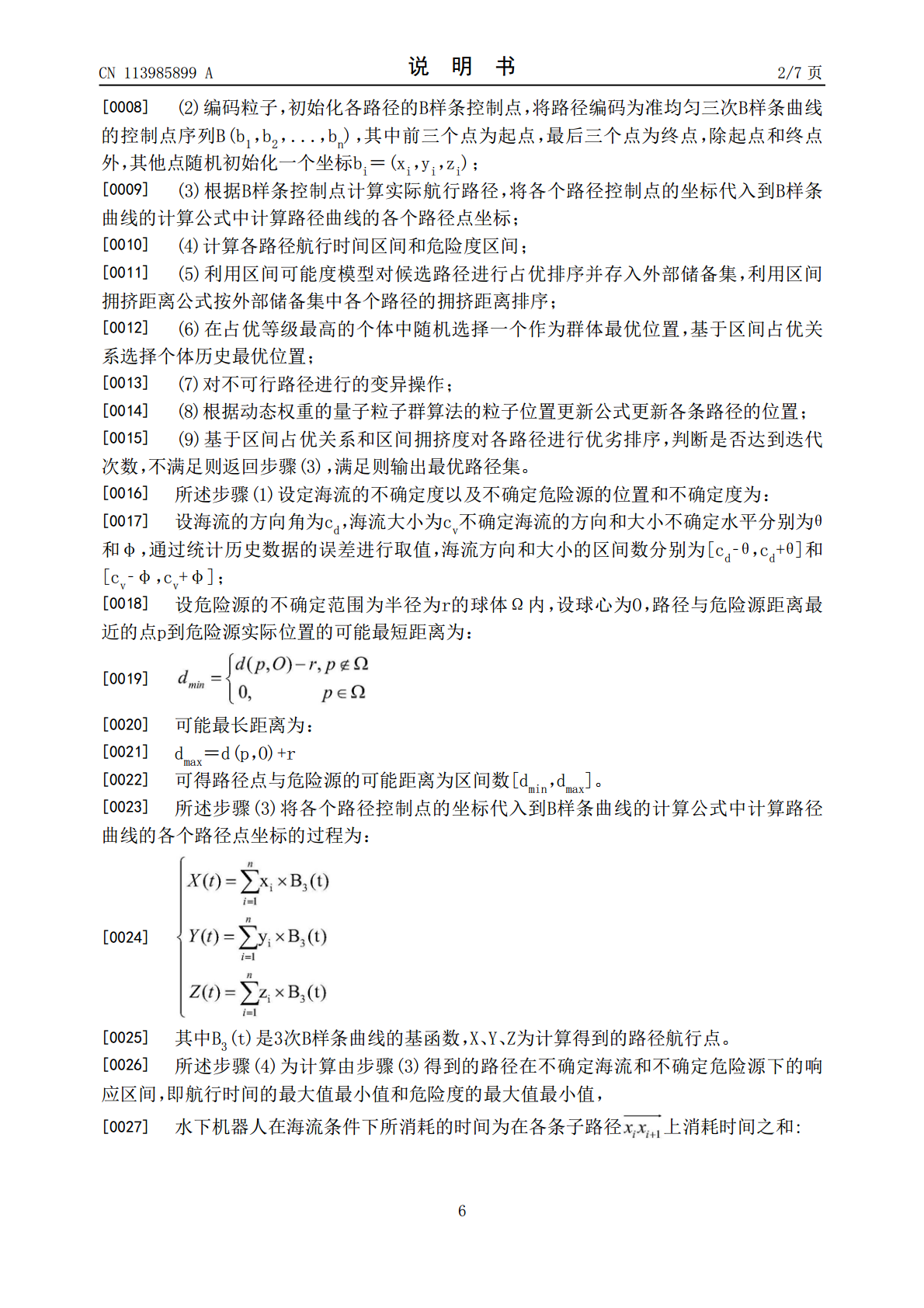
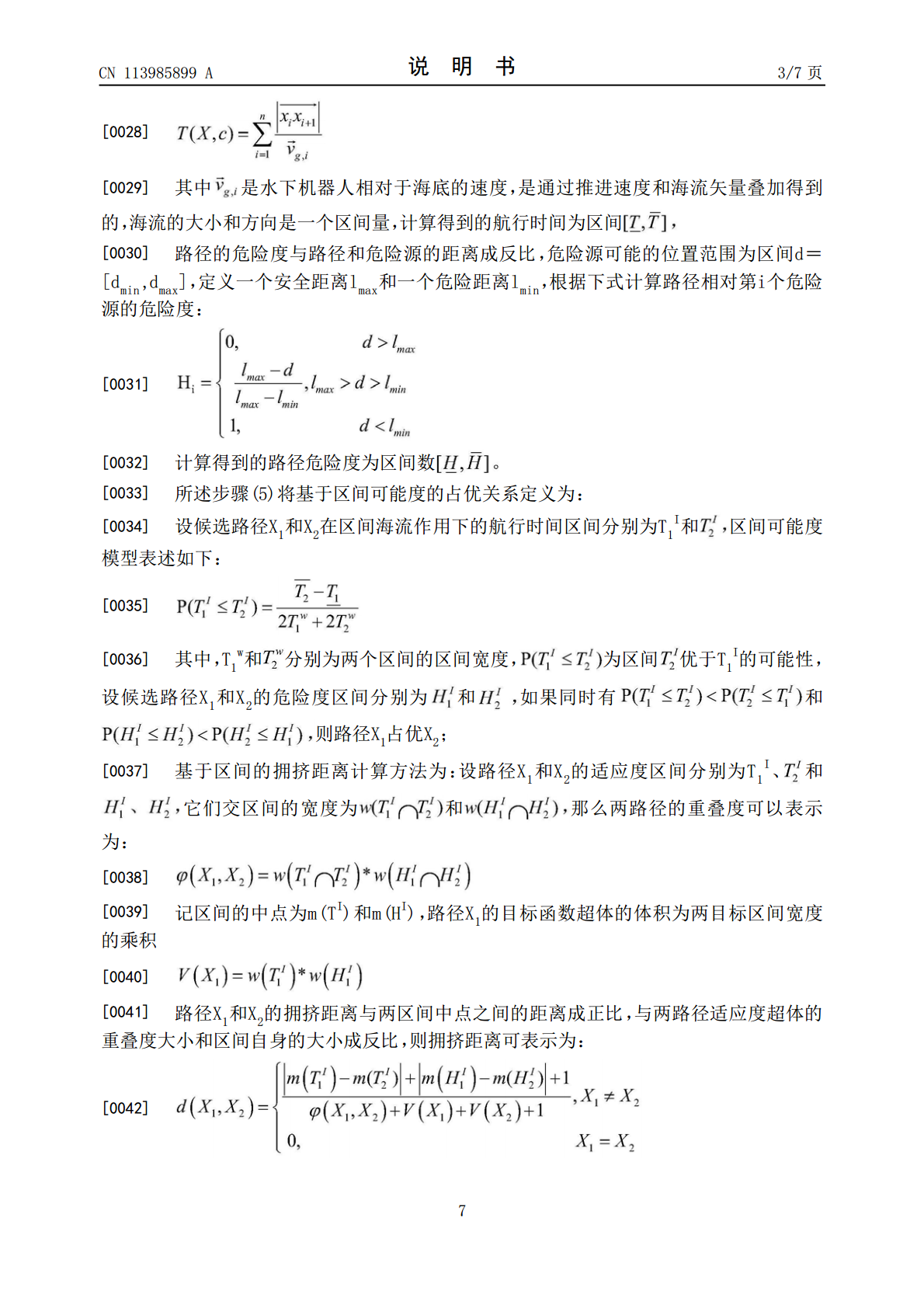
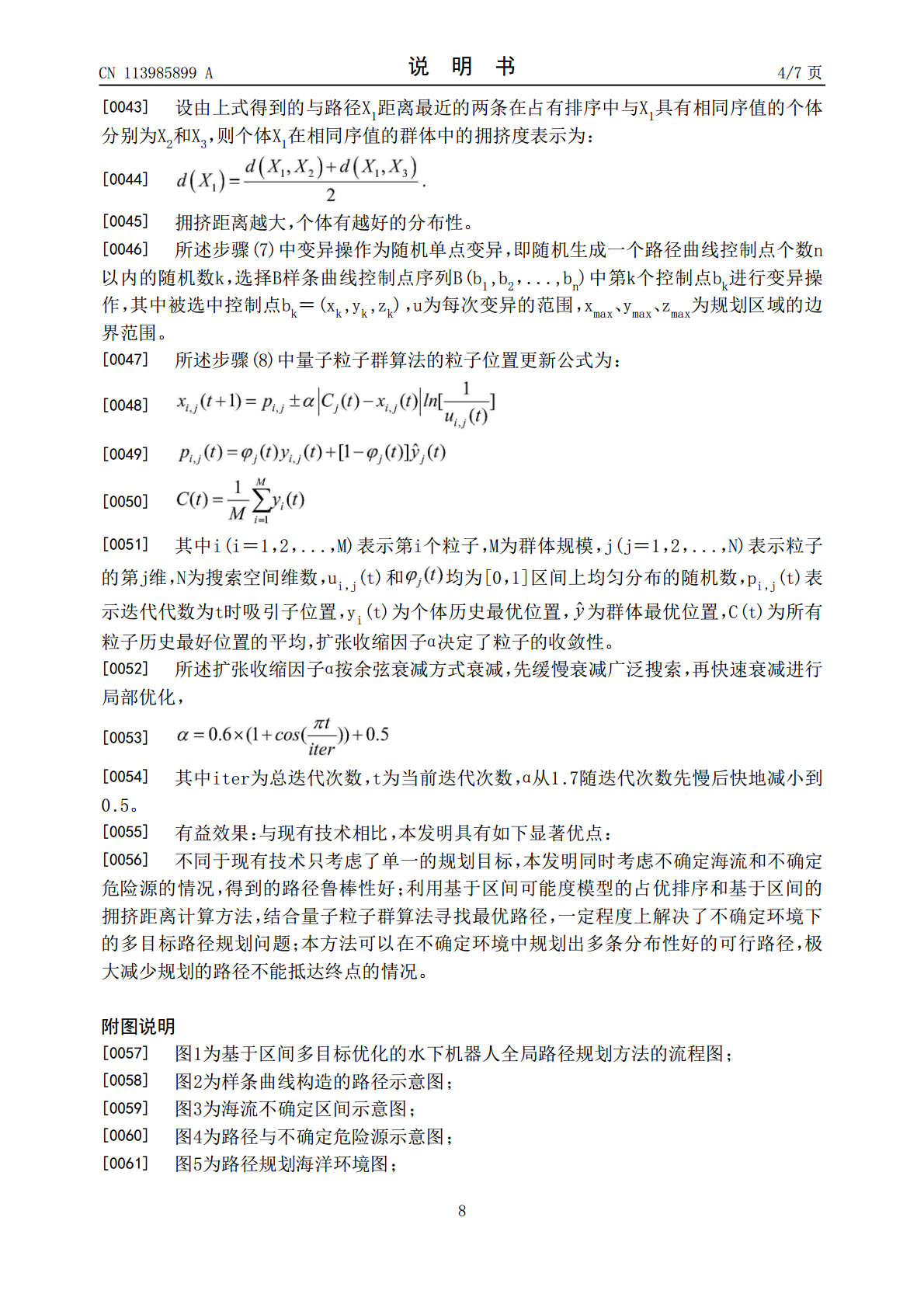
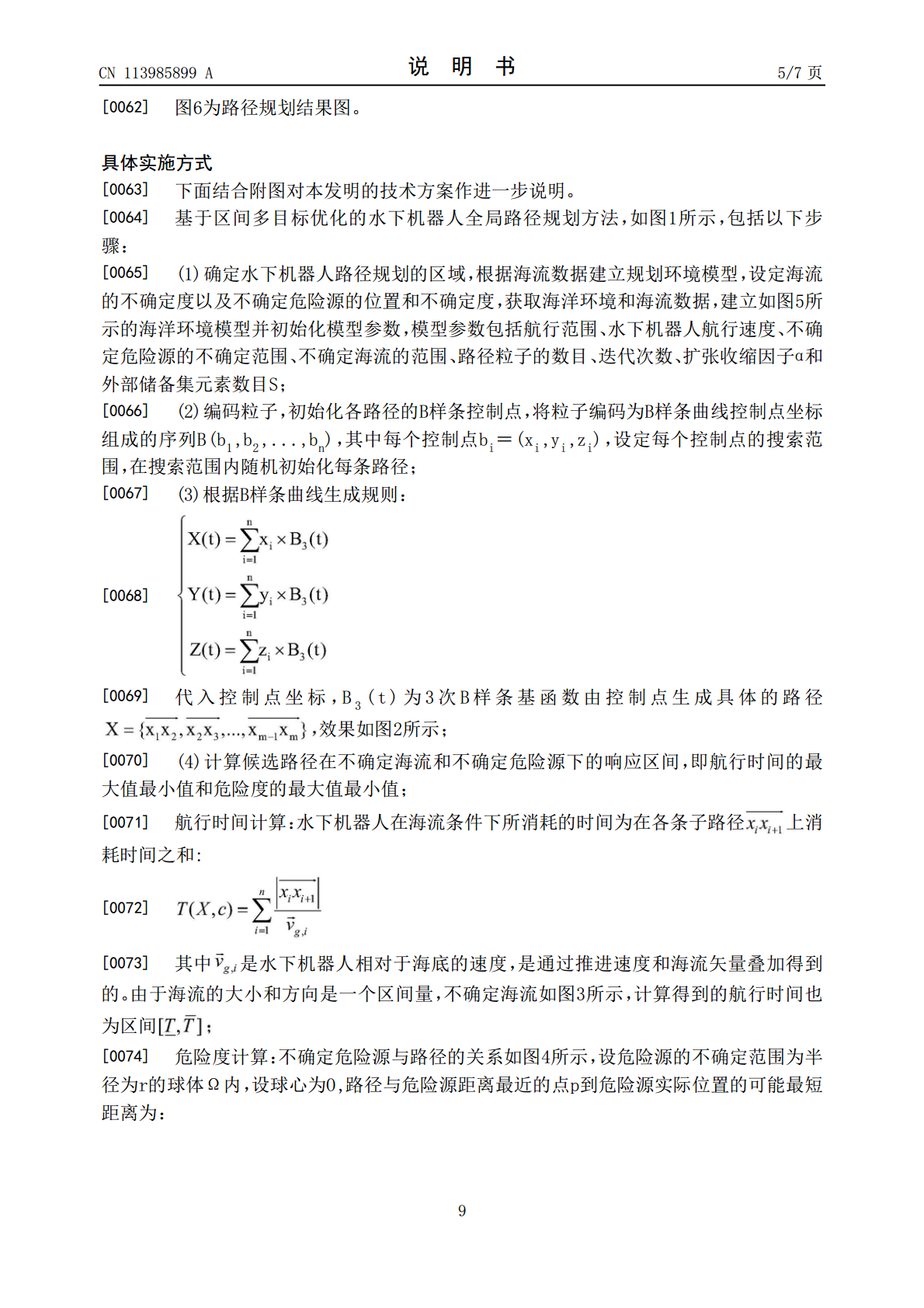
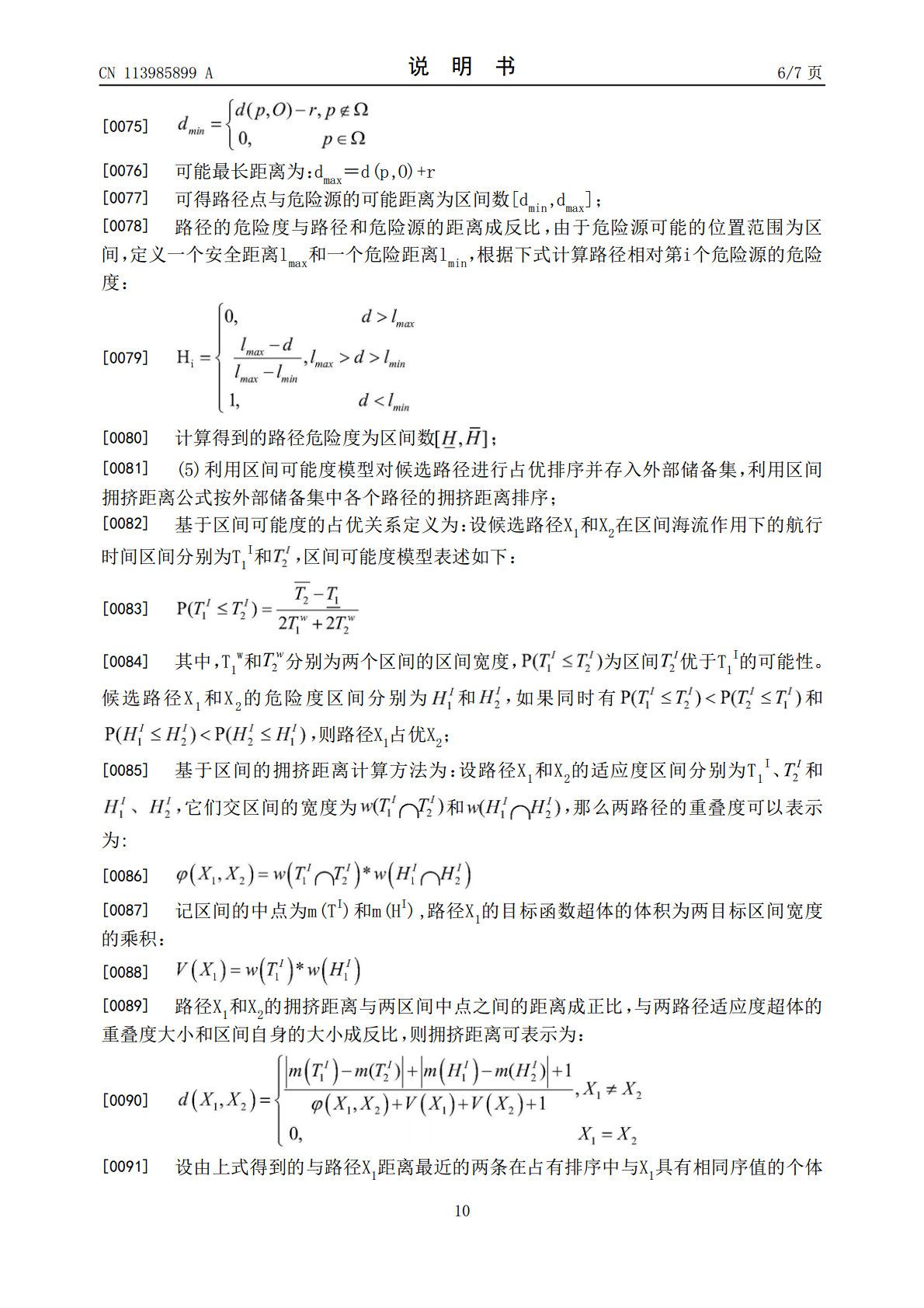
本发明公开了基于区间多目标优化的水下机器人全局路径规划方法,包括以下步骤:根据海流数据建立规划环境模型;编码粒子,初始化各路径的B样条控制点;将各个路径控制点的坐标代入到B样条曲线的计算公式中计算路径曲线的各个路径点坐标;计算各路径航行时间区间和危险度区间;利用区间可能度模型对候选路径进行占优排序并存入外部储备集,利用区间拥挤距离公式按外部储备集中各个路径的拥挤距离排序;对不可行路径进行的变异操作;根据粒子位置更新公式更新各条路径的位置;判断是否达到迭代次数,不满足则返回步骤(3),满足则输出最优路径集。

基于GA的水下机器人多目标路径规划研究的综述报告.docx
基于GA的水下机器人多目标路径规划研究的综述报告水下机器人(AUV)是一种具有较高自主性能的水下机器人,广泛应用于水下海洋调查、海洋资源勘探等领域。近年来,针对其多目标路径规划问题,研究者们采用遗传算法(GA)进行了广泛研究。本文将从基本原理、应用领域、具体实现等方面综述基于GA的水下机器人多目标路径规划研究。一、基本原理遗传算法(GA)是一种基于生物遗传和进化原理的优化算法,因其适用于复杂问题、全局优化等特点被广泛应用。其实现流程包括以下步骤:1.初始化种群,将所有路径编码成二进制串,形成一个初始种群。
基于多目标搜索的两群多向机器人路径规划方法.pdf
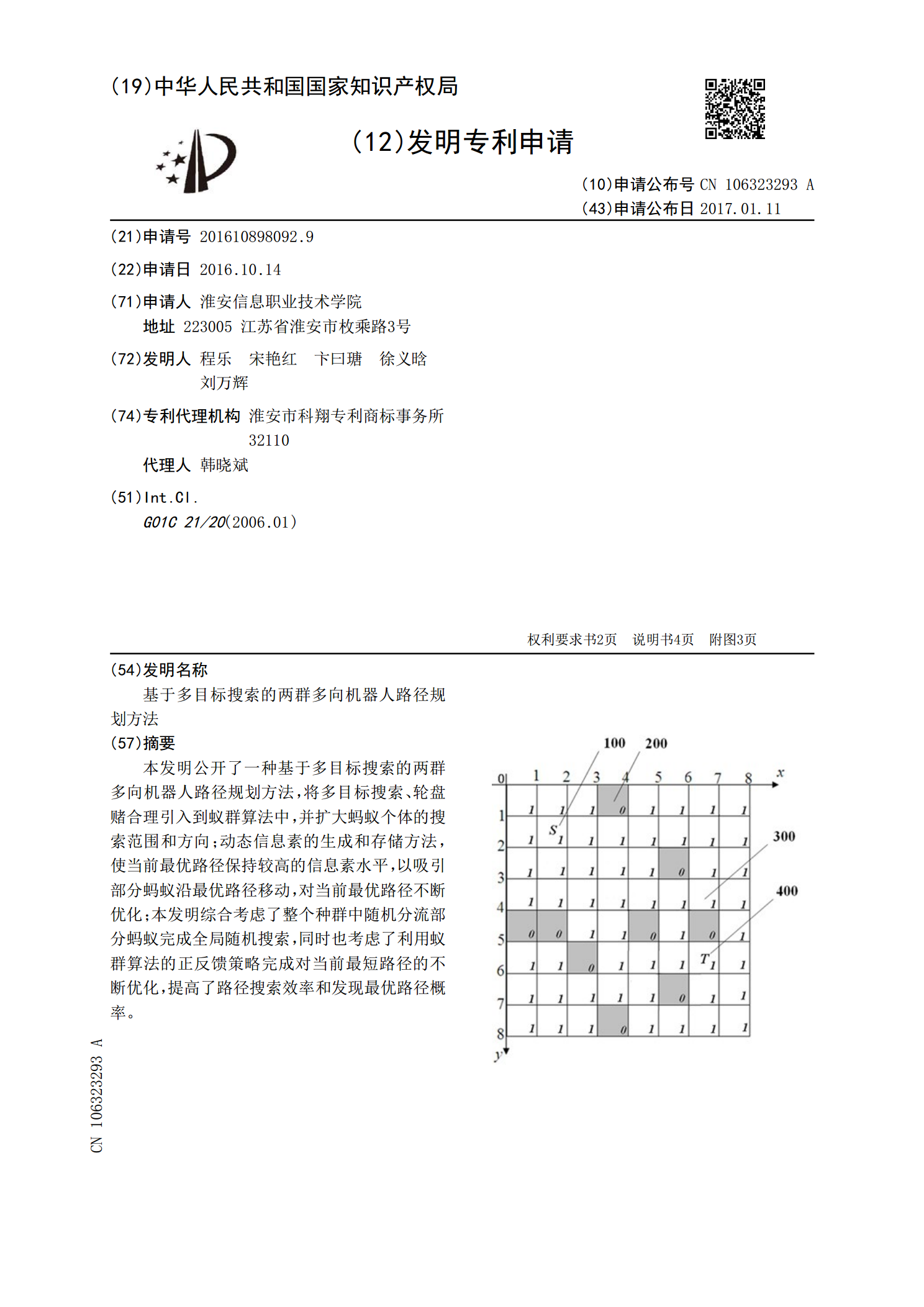
本发明公开了一种基于多目标搜索的两群多向机器人路径规划方法,将多目标搜索、轮盘赌合理引入到蚁群算法中,并扩大蚂蚁个体的搜索范围和方向;动态信息素的生成和存储方法,使当前最优路径保持较高的信息素水平,以吸引部分蚂蚁沿最优路径移动,对当前最优路径不断优化;本发明综合考虑了整个种群中随机分流部分蚂蚁完成全局随机搜索,同时也考虑了利用蚁群算法的正反馈策略完成对当前最短路径的不断优化,提高了路径搜索效率和发现最优路径概率。
基于约束性多目标粒子群优化的路径规划方法及相关设备.pdf
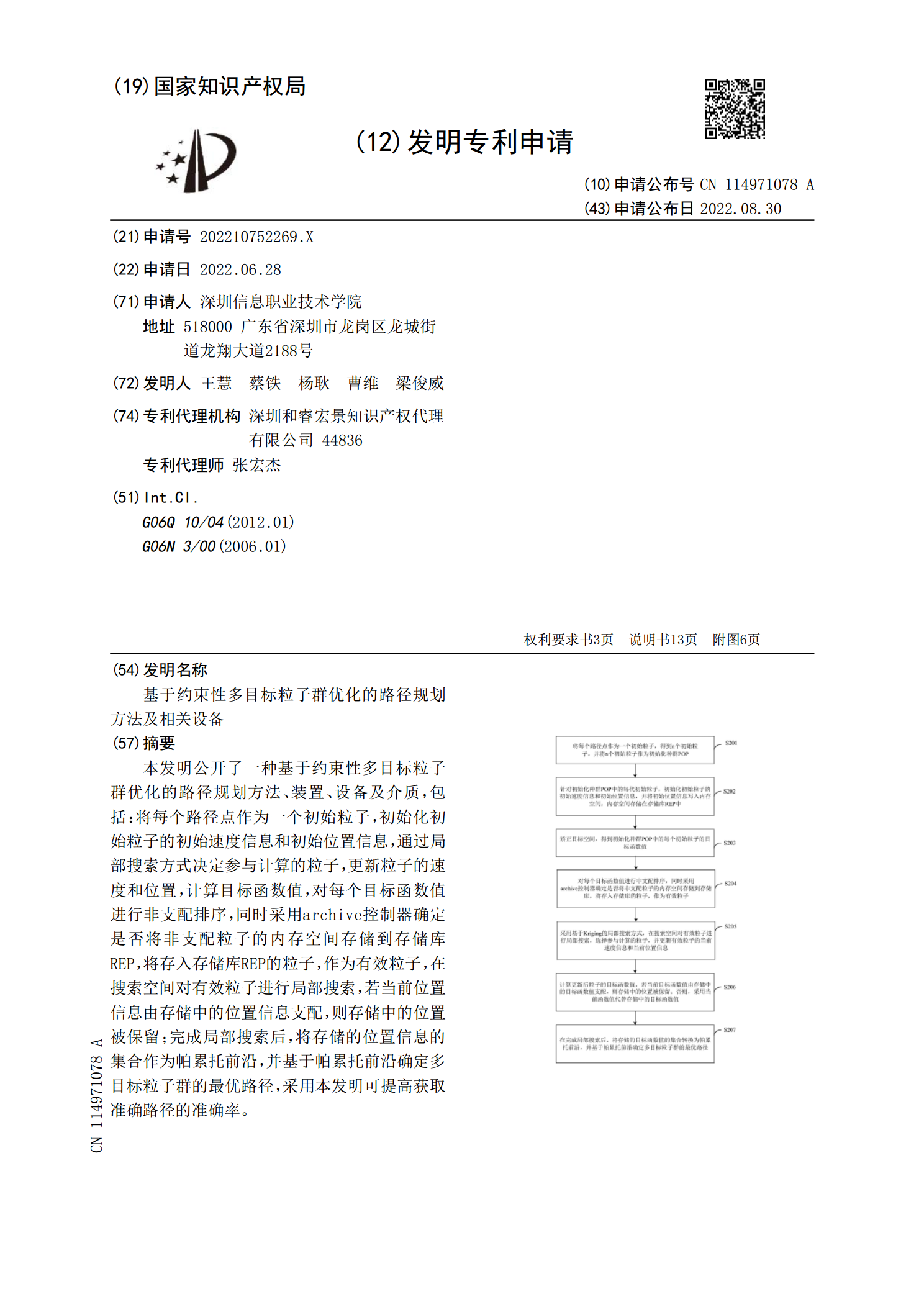
本发明公开了一种基于约束性多目标粒子群优化的路径规划方法、装置、设备及介质,包括:将每个路径点作为一个初始粒子,初始化初始粒子的初始速度信息和初始位置信息,通过局部搜索方式决定参与计算的粒子,更新粒子的速度和位置,计算目标函数值,对每个目标函数值进行非支配排序,同时采用archive控制器确定是否将非支配粒子的内存空间存储到存储库REP,将存入存储库REP的粒子,作为有效粒子,在搜索空间对有效粒子进行局部搜索,若当前位置信息由存储中的位置信息支配,则存储中的位置被保留;完成局部搜索后,将存储的位置信息的集

一种基于进化多目标多任务优化的路径规划方法.pdf
本发明提供了一种基于进化多目标多任务优化的车辆路径规划方法,将车辆路径规划的每一个目标函数作为一个单独的任务,并利用多任务优化中的种群构造、信息迁移、子代生成、种群更新等操作对多个任务同时进行求解;采用多任务优化与多目标优化交替进行的两阶段策略,当满足设定的切换条件时,将多任务优化过程切换到多目标优化过程,通过多目标优化的种群构造、子代生成、种群更新、外部存档更新等操作优化非占优解集;采用基于精英保留的种群重构策略,当满足设定的重构条件时,只保留部分精英解,其余规划方案通过基于高斯游走的方式重新生成并加入