
智能车队的路径跟踪与纵向跟随控制的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能车队的路径跟踪与纵向跟随控制的中期报告.docx
智能车队的路径跟踪与纵向跟随控制的中期报告引言随着无人驾驶技术的不断发展,智能车队已经成为了未来的发展方向。然而,智能车队中车辆之间的路径跟踪与纵向跟随控制是一个复杂的问题。为了实现智能车队之间的安全协同行驶,必须解决这个问题。本文将介绍智能车队路径跟踪与纵向跟随控制的研究现状,并给出中期报告。路径跟踪控制路径跟踪是指车辆在行驶过程中,根据所设定的行驶路线,实现自动驾驶。传统的路径跟踪控制方法主要有PID控制和数据驱动控制方法。PID控制方法主要基于车辆的位置误差、方向误差和速度误差来调整车辆的行驶方向和

智能车队的路径跟踪与纵向跟随控制.pptx
汇报人:CONTENTS添加章节标题智能车队系统概述智能车队系统的定义和作用智能车队系统的应用场景和优势智能车队系统的研究意义路径跟踪控制算法路径跟踪控制算法的原理和分类路径跟踪控制算法的实现方法和步骤路径跟踪控制算法的优缺点和改进方向纵向跟随控制算法纵向跟随控制算法的原理和分类纵向跟随控制算法的实现方法和步骤纵向跟随控制算法的优缺点和改进方向智能车队系统实验验证实验环境和测试条件实验结果和分析结果与现有技术的比较和讨论总结与展望本文工作总结未来研究方向和展望汇报人:
基于反馈纯跟踪的智能车辆路径跟随控制方法.pdf
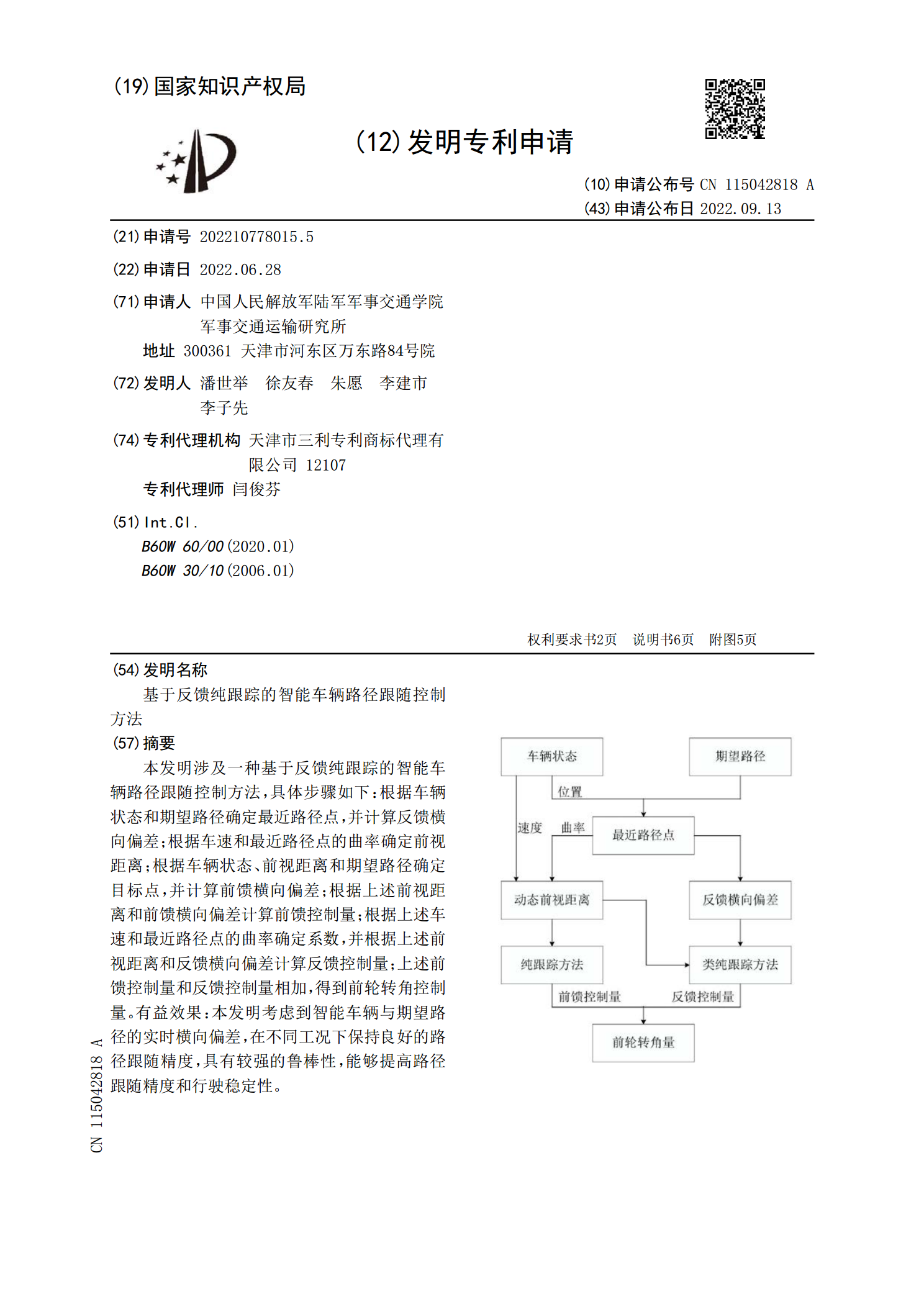
本发明涉及一种基于反馈纯跟踪的智能车辆路径跟随控制方法,具体步骤如下:根据车辆状态和期望路径确定最近路径点,并计算反馈横向偏差;根据车速和最近路径点的曲率确定前视距离;根据车辆状态、前视距离和期望路径确定目标点,并计算前馈横向偏差;根据上述前视距离和前馈横向偏差计算前馈控制量;根据上述车速和最近路径点的曲率确定系数,并根据上述前视距离和反馈横向偏差计算反馈控制量;上述前馈控制量和反馈控制量相加,得到前轮转角控制量。有益效果:本发明考虑到智能车辆与期望路径的实时横向偏差,在不同工况下保持良好的路径跟随精度,
一种纯跟踪智能车路径跟随控制方法.pdf
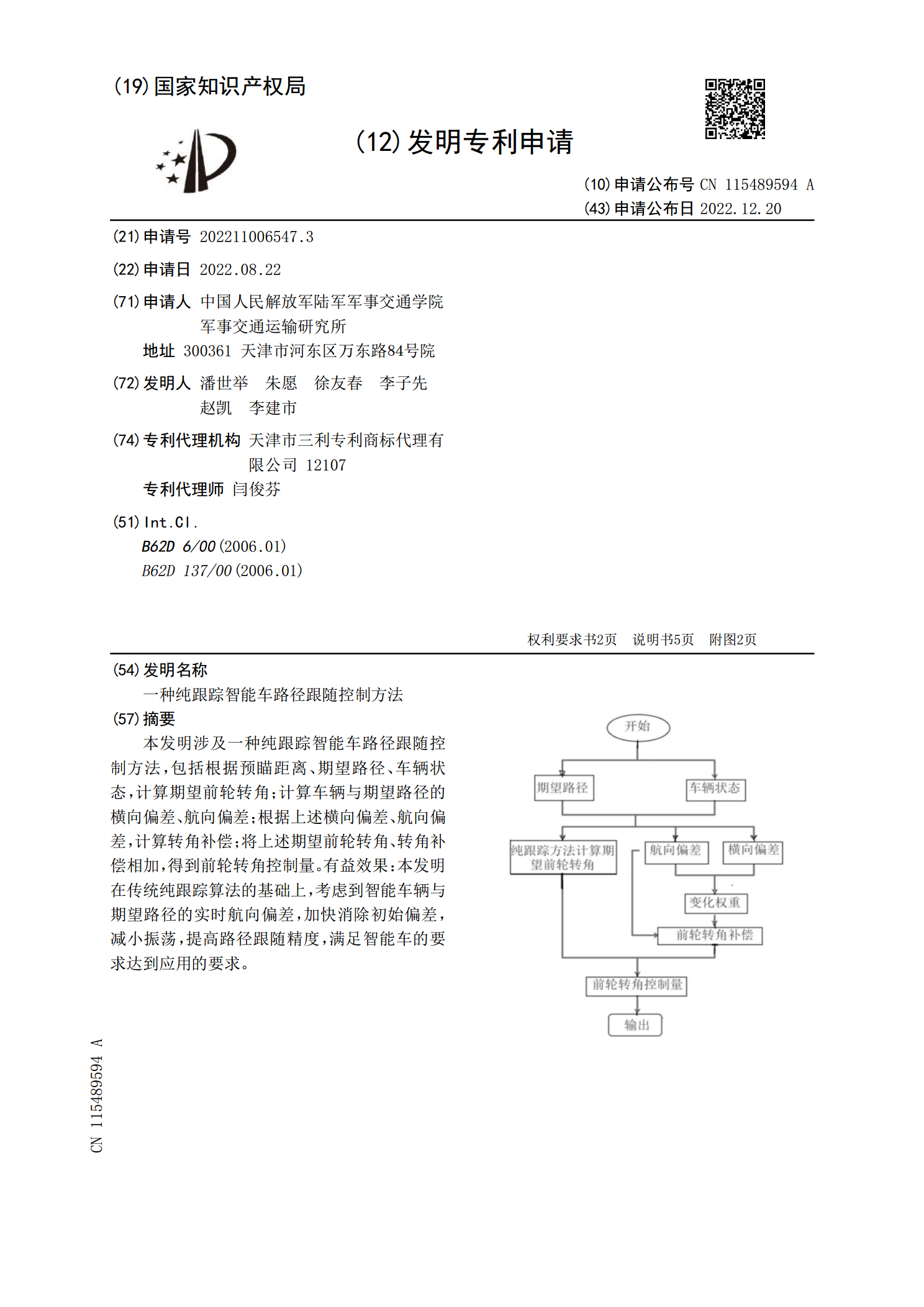
本发明涉及一种纯跟踪智能车路径跟随控制方法,包括根据预瞄距离、期望路径、车辆状态,计算期望前轮转角;计算车辆与期望路径的横向偏差、航向偏差;根据上述横向偏差、航向偏差,计算转角补偿;将上述期望前轮转角、转角补偿相加,得到前轮转角控制量。有益效果:本发明在传统纯跟踪算法的基础上,考虑到智能车辆与期望路径的实时航向偏差,加快消除初始偏差,减小振荡,提高路径跟随精度,满足智能车的要求达到应用的要求。

考虑通信延迟的智能车队纵向控制.docx
考虑通信延迟的智能车队纵向控制目录一、内容概述................................................21.1背景与意义...........................................31.2国内外研究现状.......................................3二、智能车队纵向控制基本原理................................52.1车队纵向控制的概念......................