
一种大尺寸重载筒形工件搬运对接装置.pdf

努力****元恺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种大尺寸重载筒形工件搬运对接装置.pdf
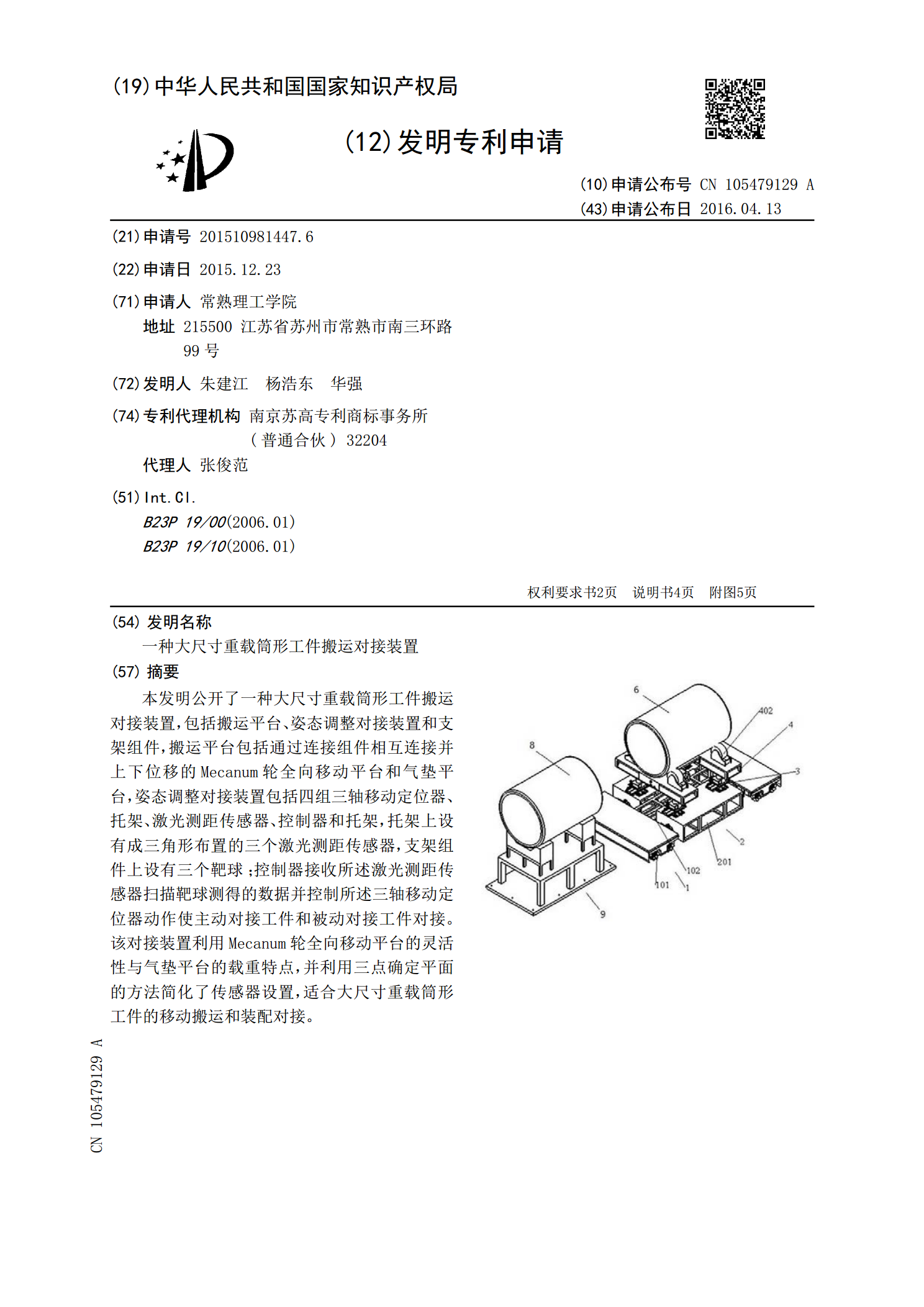
本发明公开了一种大尺寸重载筒形工件搬运对接装置,包括搬运平台、姿态调整对接装置和支架组件,搬运平台包括通过连接组件相互连接并上下位移的Mecanum轮全向移动平台和气垫平台,姿态调整对接装置包括四组三轴移动定位器、托架、激光测距传感器、控制器和托架,托架上设有成三角形布置的三个激光测距传感器,支架组件上设有三个靶球;控制器接收所述激光测距传感器扫描靶球测得的数据并控制所述三轴移动定位器动作使主动对接工件和被动对接工件对接。该对接装置利用Mecanum轮全向移动平台的灵活性与气垫平台的载重特点,并利用三点确

一种重载大尺寸液压举升搬运装置.pdf
本发明公开了一种重载大尺寸液压举升搬运装置,它包括承载框架,该框架两侧设有中空的滑轨,前端设置有底板,靠近底板一侧的两根滑轨之间布置有顶板;所述底板上端安装有驱动机构,下端安装有前导向轮,所述滑轨内安装有联动机构,顶部末端固接有三角铁。该装置采用液压驱动和多级杠杆牵连运动的原理制成的联动机构来分别进行货物的前后举升,举升过程耗时短,效率高,而使得大尺寸规则货柜或停放架等货物的搬运变得更加容易,不会耗费大量的人力物力;同时还具备举升结束后的自动下降固定,防止货物滑落。
一种筒形工件的交接装置.pdf
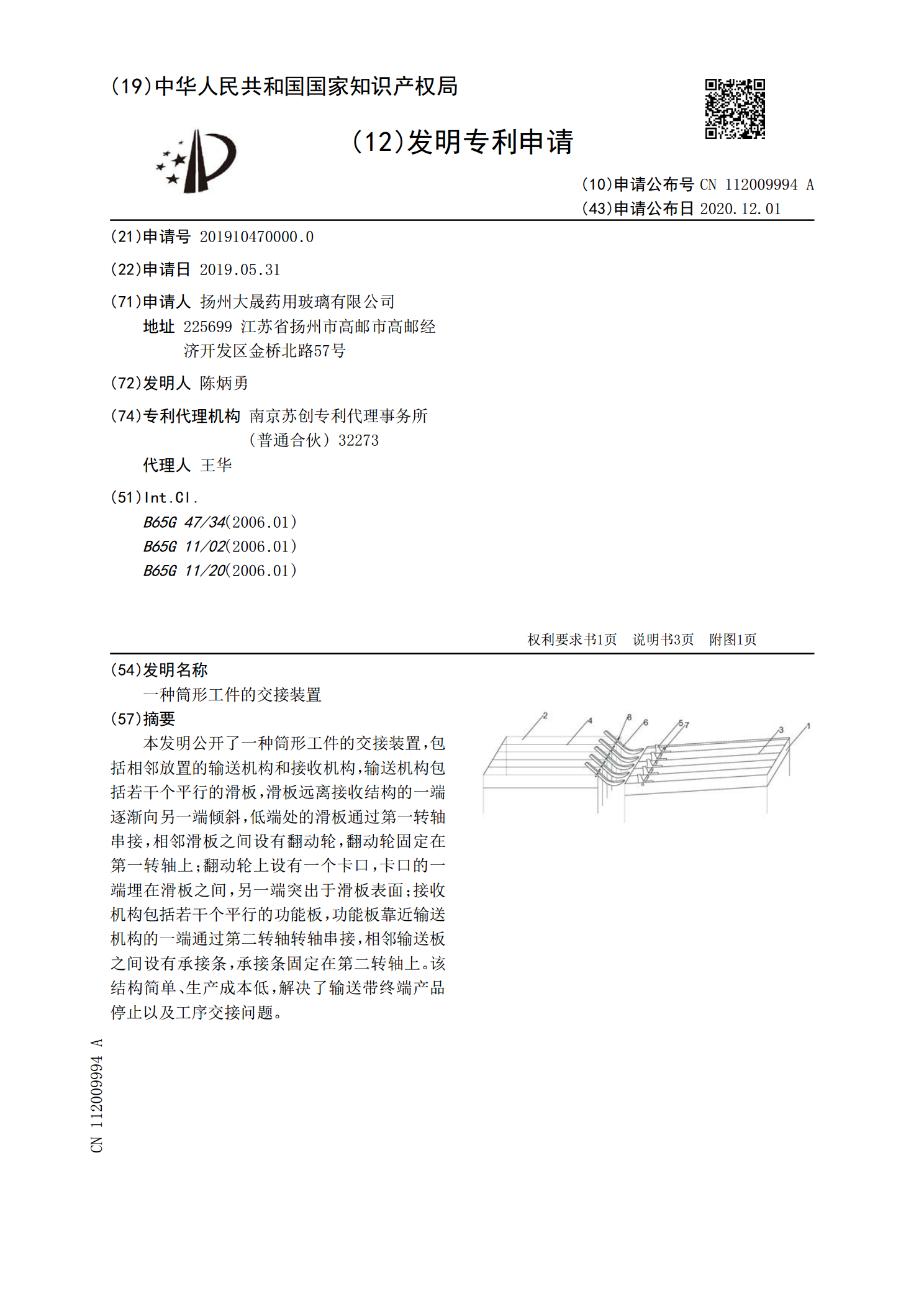
本发明公开了一种筒形工件的交接装置,包括相邻放置的输送机构和接收机构,输送机构包括若干个平行的滑板,滑板远离接收结构的一端逐渐向另一端倾斜,低端处的滑板通过第一转轴串接,相邻滑板之间设有翻动轮,翻动轮固定在第一转轴上;翻动轮上设有一个卡口,卡口的一端埋在滑板之间,另一端突出于滑板表面;接收机构包括若干个平行的功能板,功能板靠近输送机构的一端通过第二转轴转轴串接,相邻输送板之间设有承接条,承接条固定在第二转轴上。该结构简单、生产成本低,解决了输送带终端产品停止以及工序交接问题。
一种薄壁筒形工件铸造冷却装置.pdf
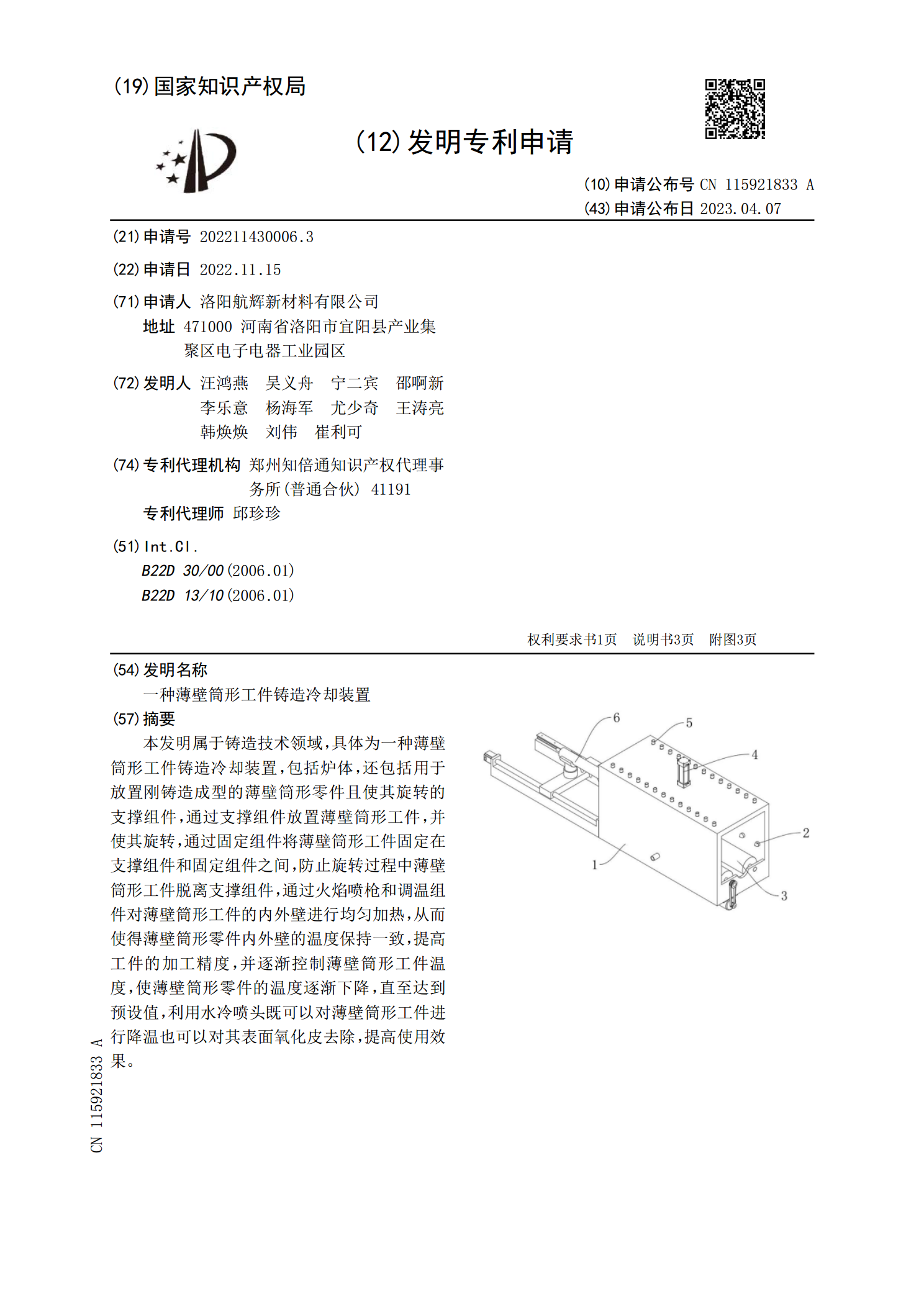
本发明属于铸造技术领域,具体为一种薄壁筒形工件铸造冷却装置,包括炉体,还包括用于放置刚铸造成型的薄壁筒形零件且使其旋转的支撑组件,通过支撑组件放置薄壁筒形工件,并使其旋转,通过固定组件将薄壁筒形工件固定在支撑组件和固定组件之间,防止旋转过程中薄壁筒形工件脱离支撑组件,通过火焰喷枪和调温组件对薄壁筒形工件的内外壁进行均匀加热,从而使得薄壁筒形零件内外壁的温度保持一致,提高工件的加工精度,并逐渐控制薄壁筒形工件温度,使薄壁筒形零件的温度逐渐下降,直至达到预设值,利用水冷喷头既可以对薄壁筒形工件进行降温也可以对
筒形工件分配安放装置.pdf
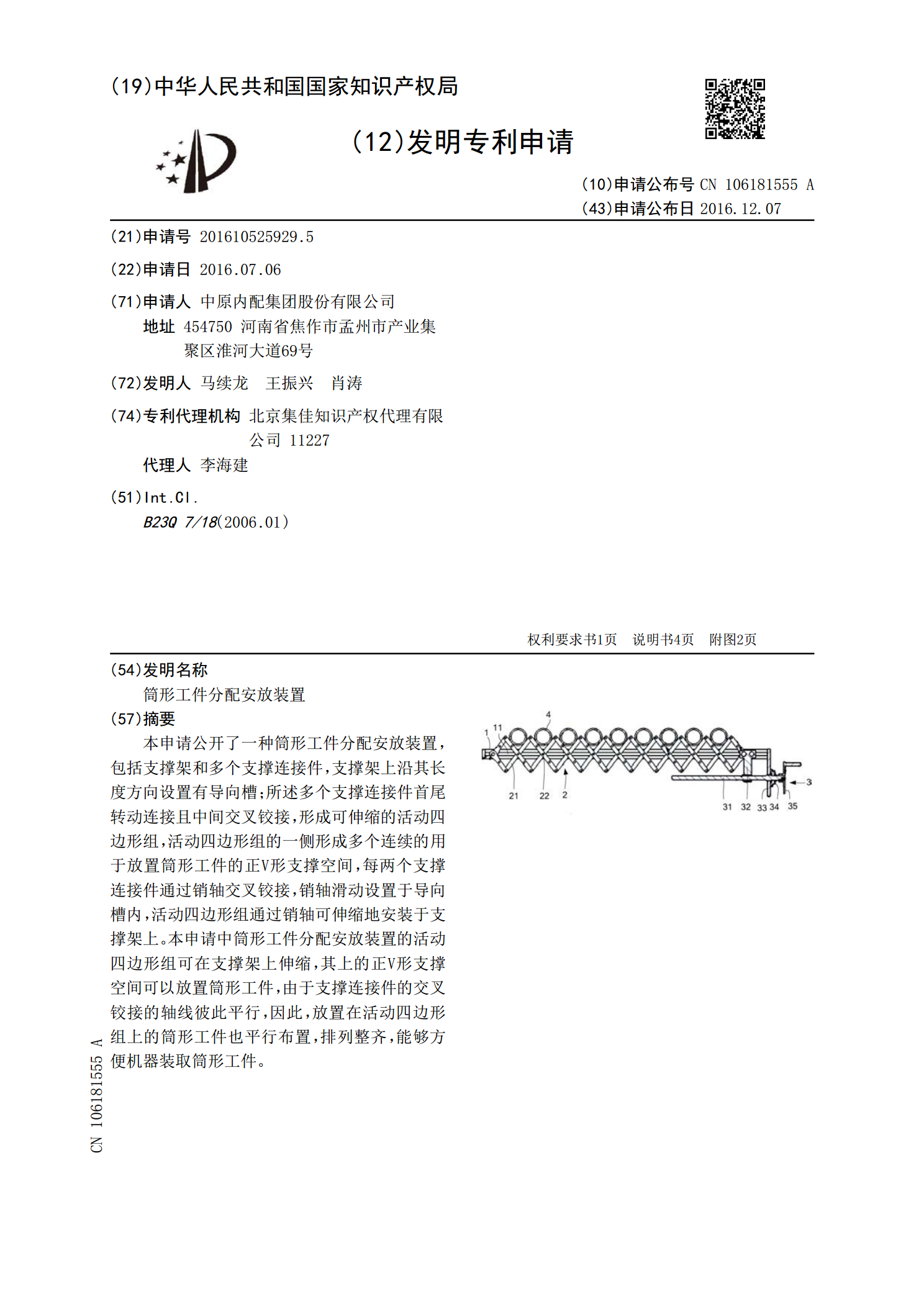
本申请公开了一种筒形工件分配安放装置,包括支撑架和多个支撑连接件,支撑架上沿其长度方向设置有导向槽;所述多个支撑连接件首尾转动连接且中间交叉铰接,形成可伸缩的活动四边形组,活动四边形组的一侧形成多个连续的用于放置筒形工件的正V形支撑空间,每两个支撑连接件通过销轴交叉铰接,销轴滑动设置于导向槽内,活动四边形组通过销轴可伸缩地安装于支撑架上。本申请中筒形工件分配安放装置的活动四边形组可在支撑架上伸缩,其上的正V形支撑空间可以放置筒形工件,由于支撑连接件的交叉铰接的轴线彼此平行,因此,放置在活动四边形组上的筒形