
一种点焊柔性单元机构及其使用方法.pdf

冷霜****魔王


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种点焊柔性单元机构及其使用方法.pdf
本发明公开了一种点焊柔性单元机构及其使用方法,包括机箱,所述机箱左右两侧各设有一个焊机和一个送丝机;机箱内设有夹具,所述夹具安装在夹具底座上,夹具底座上安装有气缸,所述气缸驱动连接焊枪,送丝机对焊枪送丝;夹具底座中部安装有伺服电机,伺服电机驱动连接减速机,减速机驱动连接由三个齿轮组成的齿轮组,齿轮组连接传动轴,传动轴两端各有一个由三个齿轮组成的齿轮组,传动轴两端的齿轮组均驱动连接装夹机构。本发明结构简单,设计合理,使用简便,成本较低,能够自动进行焊接,提高了焊接工作效率和焊接质量,控制了成本,能够达到工作
一种叉车的多节式柔性传动机构及其使用方法.pdf
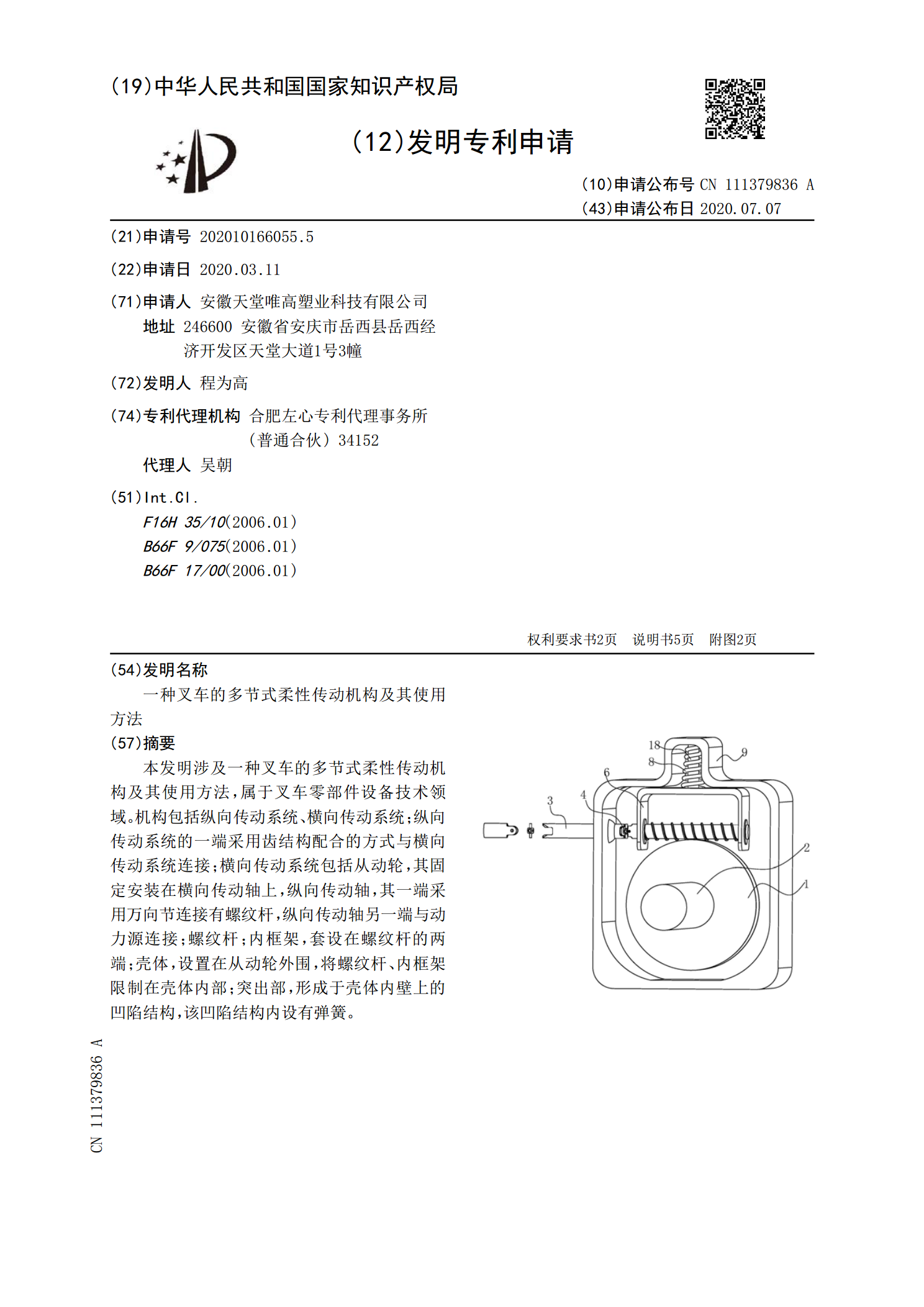
本发明涉及一种叉车的多节式柔性传动机构及其使用方法,属于叉车零部件设备技术领域。机构包括纵向传动系统、横向传动系统;纵向传动系统的一端采用齿结构配合的方式与横向传动系统连接;横向传动系统包括从动轮,其固定安装在横向传动轴上,纵向传动轴,其一端采用万向节连接有螺纹杆,纵向传动轴另一端与动力源连接;螺纹杆;内框架,套设在螺纹杆的两端;壳体,设置在从动轮外围,将螺纹杆、内框架限制在壳体内部;突出部,形成于壳体内壁上的凹陷结构,该凹陷结构内设有弹簧。

一种新型柔性工装及其使用方法.pdf
本发明一种新型柔性工装及其使用方法,用于装夹零件机匣,所述工装包括:圆形底板,圆形底板上设置有环形凸台,圆形底板上沿周向设置多组夹持机构,夹持结构对零件机匣的支板进行夹持定位,圆形底板上还沿周向设置多个定位销,定位销水平放置,且定位销端部对正于支板。实现了组件焊接时的单体定位功能和零件焊接后的单体位置测量功能,将零件焊接后的测量成本、零件周转成本几乎降低为零,还可使零件的校正和测量同时在工装上一次完成,零件偏差非常直观,校正效率大幅提高,加工质量提高,通过定位销和锥形盲孔的配合,完成零件的定位和测量,使用
一种可调柔性电刷及其使用方法.pdf
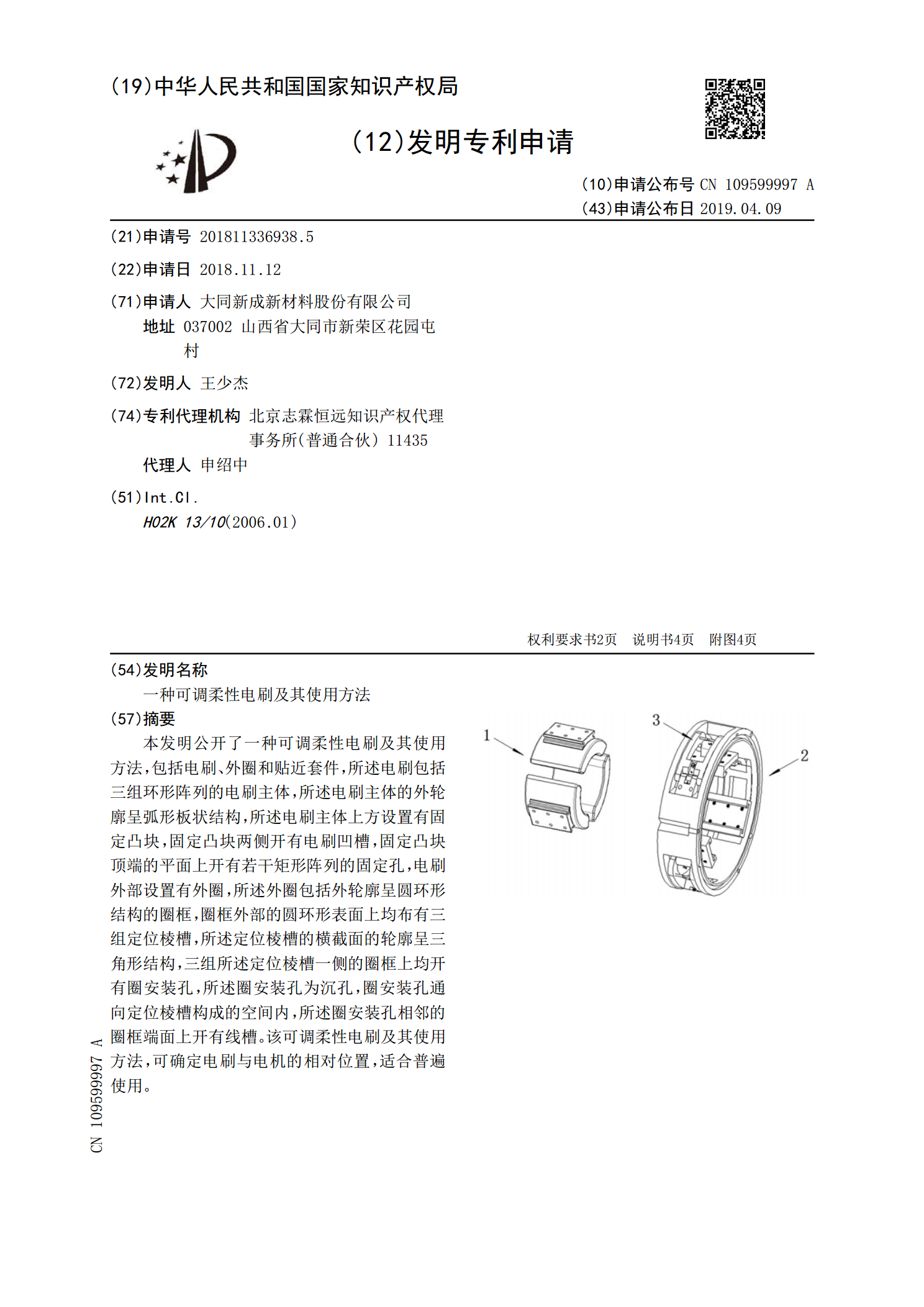
本发明公开了一种可调柔性电刷及其使用方法,包括电刷、外圈和贴近套件,所述电刷包括三组环形阵列的电刷主体,所述电刷主体的外轮廓呈弧形板状结构,所述电刷主体上方设置有固定凸块,固定凸块两侧开有电刷凹槽,固定凸块顶端的平面上开有若干矩形阵列的固定孔,电刷外部设置有外圈,所述外圈包括外轮廓呈圆环形结构的圈框,圈框外部的圆环形表面上均布有三组定位棱槽,所述定位棱槽的横截面的轮廓呈三角形结构,三组所述定位棱槽一侧的圈框上均开有圈安装孔,所述圈安装孔为沉孔,圈安装孔通向定位棱槽构成的空间内,所述圈安装孔相邻的圈框端面上
一种柔性焊接夹具及其使用方法.pdf
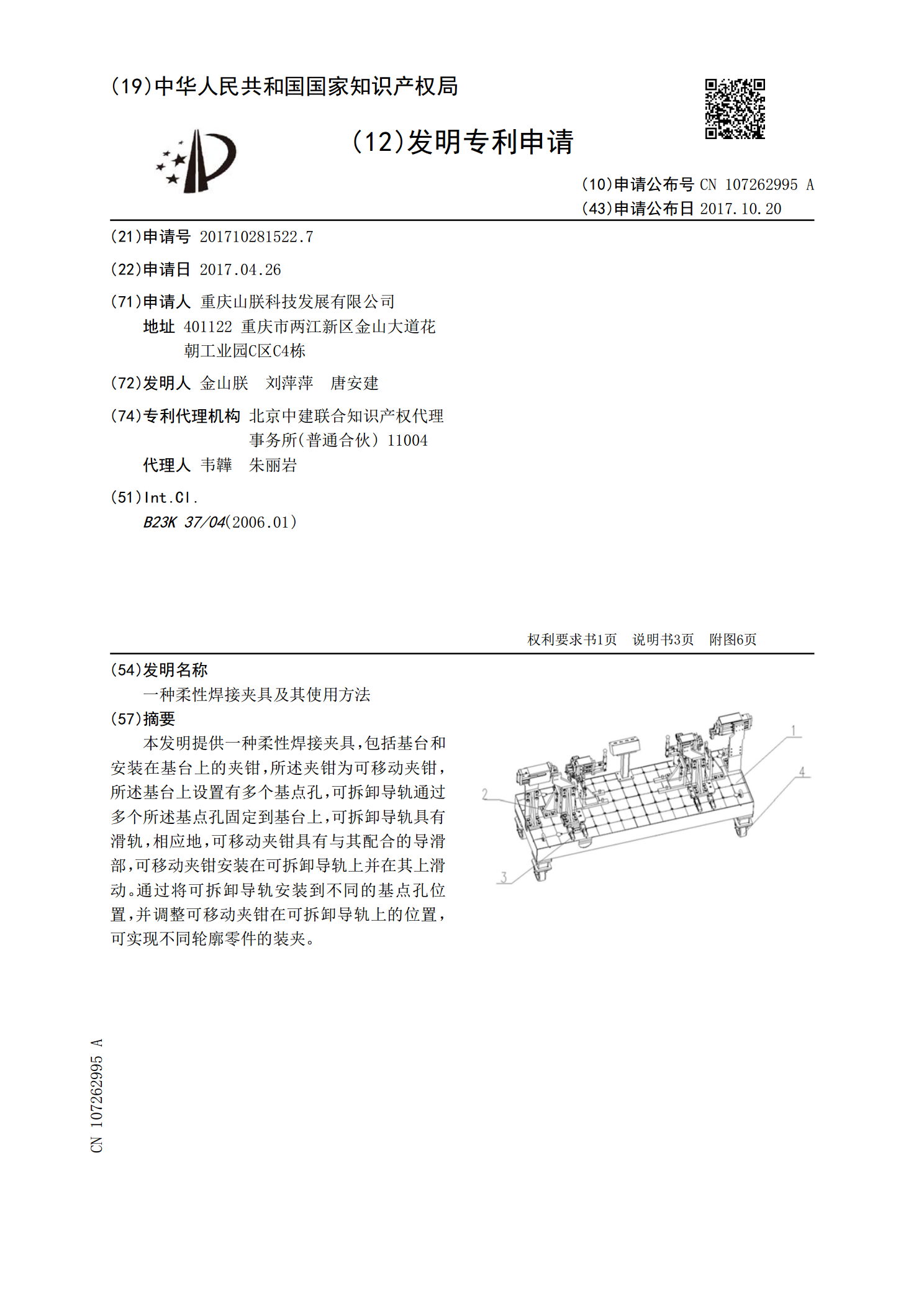
本发明提供一种柔性焊接夹具,包括基台和安装在基台上的夹钳,所述夹钳为可移动夹钳,所述基台上设置有多个基点孔,可拆卸导轨通过多个所述基点孔固定到基台上,可拆卸导轨具有滑轨,相应地,可移动夹钳具有与其配合的导滑部,可移动夹钳安装在可拆卸导轨上并在其上滑动。通过将可拆卸导轨安装到不同的基点孔位置,并调整可移动夹钳在可拆卸导轨上的位置,可实现不同轮廓零件的装夹。