
独轮自平衡电动车的设计及其运动平衡控制研究开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

独轮自平衡电动车的设计及其运动平衡控制研究开题报告.docx
独轮自平衡电动车的设计及其运动平衡控制研究开题报告一、选题背景随着智能化科技的迅猛发展,独轮自平衡电动车作为一种新型的出行方式逐渐走进我们的生活中。相较于传统的自行车或摩托车,独轮自平衡电动车具有更小的体积、更高的机动性和更快的速度,深受广大年轻人的青睐。与此同时,独轮自平衡电动车也需要具有更高的安全性和更好的运动平衡控制能力,才能更好地适应城市道路的实际需求。因此,本文将从独轮自平衡电动车的设计与运动平衡控制两个方面进行研究,以期能够提出更加符合实际需要的解决方案。二、研究内容与目标1.独轮自平衡电动车

独轮自平衡电动车的设计及其运动平衡控制研究综述报告.docx
独轮自平衡电动车的设计及其运动平衡控制研究综述报告独轮自平衡电动车(UnicycleSelf-BalancingElectricVehicle,简称USBEV)是一种完全依靠平衡控制技术进行转弯、加速、减速甚至停车等操作的交通工具。其设计具有机动性强、自重轻、能耗低等特点,逐渐受到越来越多人的青睐。本文主要对独轮自平衡电动车的设计及其运动平衡控制技术进行简要综述。一、独轮自平衡电动车的设计1.车身设计独轮自平衡电动车的车身设计相对简单,通常采用轮毂驱动方式,车身缩小至仅为一个车轮及其支架、座椅和控制系统。

两轮自平衡电动车的运动平衡控制方法研究的开题报告.docx
两轮自平衡电动车的运动平衡控制方法研究的开题报告一、研究背景和目的:随着人们生活水平的不断提高,电动车的普及率正在逐年攀升。而在电动车的发展过程中,由于传统电动车的操作不够方便,故而电动车的自平衡技术应运而生。两轮自平衡电动车是一种前后两轮单轮控制的自平衡电动车,它能够在不借助其他场地和物体的条件下进行平衡控制,这种机器人技术不仅能够提高人们的出行便利度,同时可以进行生态环境保护。因此,本研究旨在研究两轮自平衡电动车的运动平衡控制方法,为其后续的应用提供理论基础和技术支持。二、研究内容和方法:1、研究两轮
小型自平衡独轮电动车.pdf
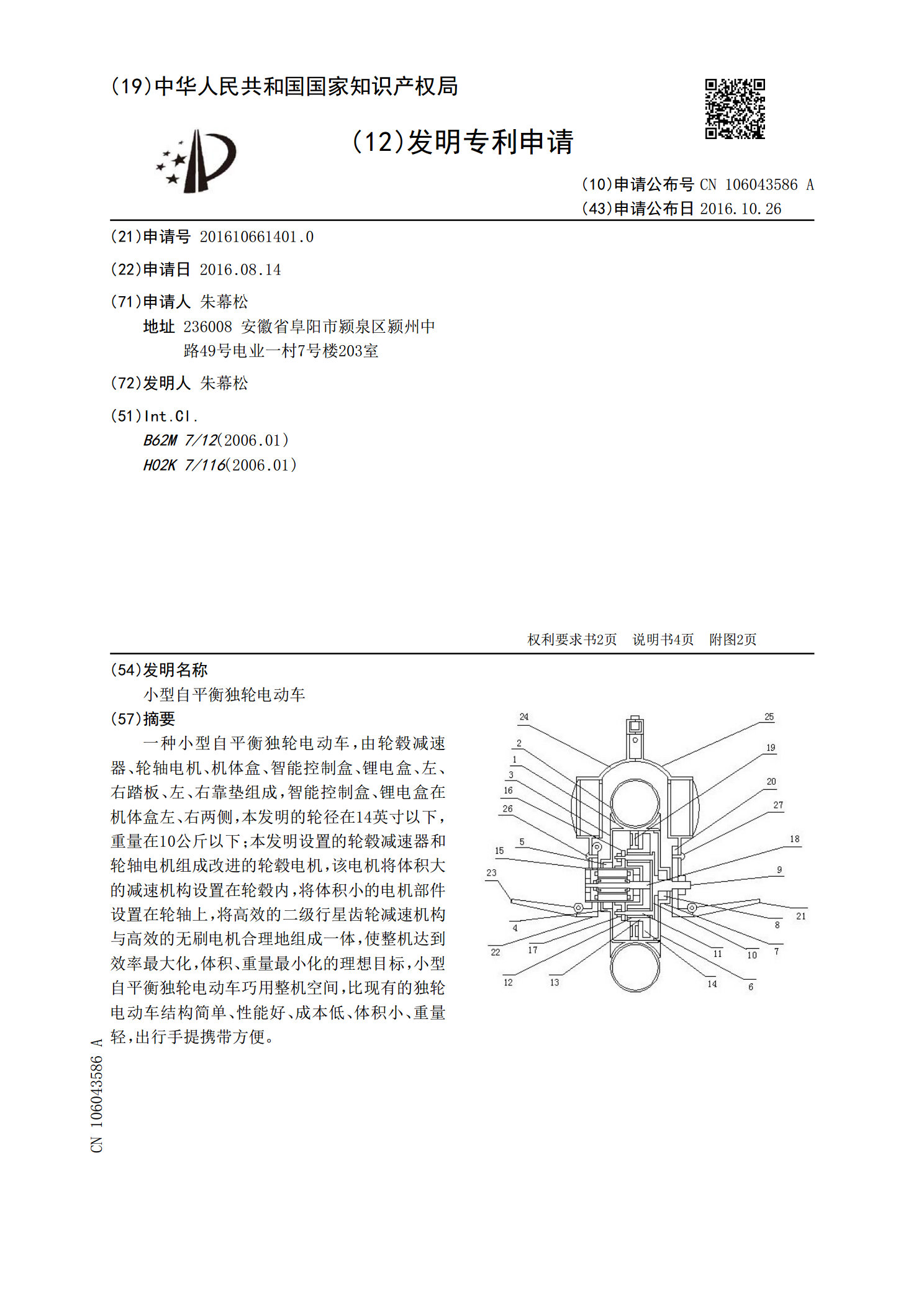
一种小型自平衡独轮电动车,由轮毂减速器、轮轴电机、机体盒、智能控制盒、锂电盒、左、右踏板、左、右靠垫组成,智能控制盒、锂电盒在机体盒左、右两侧,本发明的轮径在14英寸以下,重量在10公斤以下;本发明设置的轮毂减速器和轮轴电机组成改进的轮毂电机,该电机将体积大的减速机构设置在轮毂内,将体积小的电机部件设置在轮轴上,将高效的二级行星齿轮减速机构与高效的无刷电机合理地组成一体,使整机达到效率最大化,体积、重量最小化的理想目标,小型自平衡独轮电动车巧用整机空间,比现有的独轮电动车结构简单、性能好、成本低、体积小、

用重心控制的空心无辐独轮自平衡电动车及其控制方法.pdf
本发明涉及一种用重心控制的空心无辐独轮自平衡电动车,其特征在于,所述电动车包括电动车本体以及设置在电动车外部的外壳,所述电动车本体包括车架以及设置在车架两侧的脚踏板,所述车架内设置有传动组件、支撑组件以及控制电路,所述控制电路通过检测操纵者的前后重心的变化进而通过电机控制车辆的前进和后退,通过身体倾斜实现车辆转弯。整个技术方案设计巧妙,节后紧凑、成本较低,该平衡车外形为独特的空心“环轨”形状,空心的外形形成了自然的握持空间,不用额外为平衡车设计把手和握把,可以给骑行者带来更为舒适的骑行体验。