
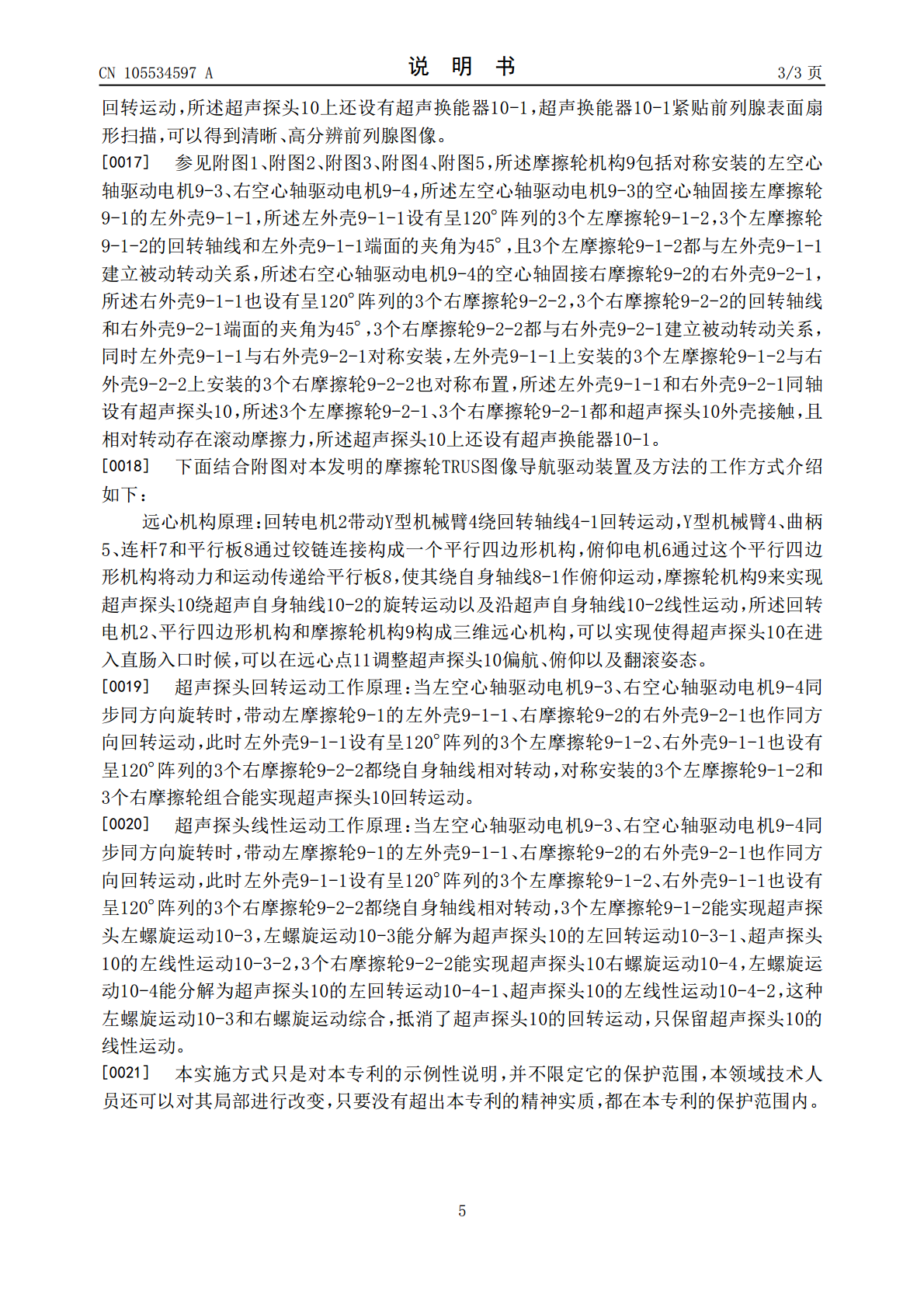
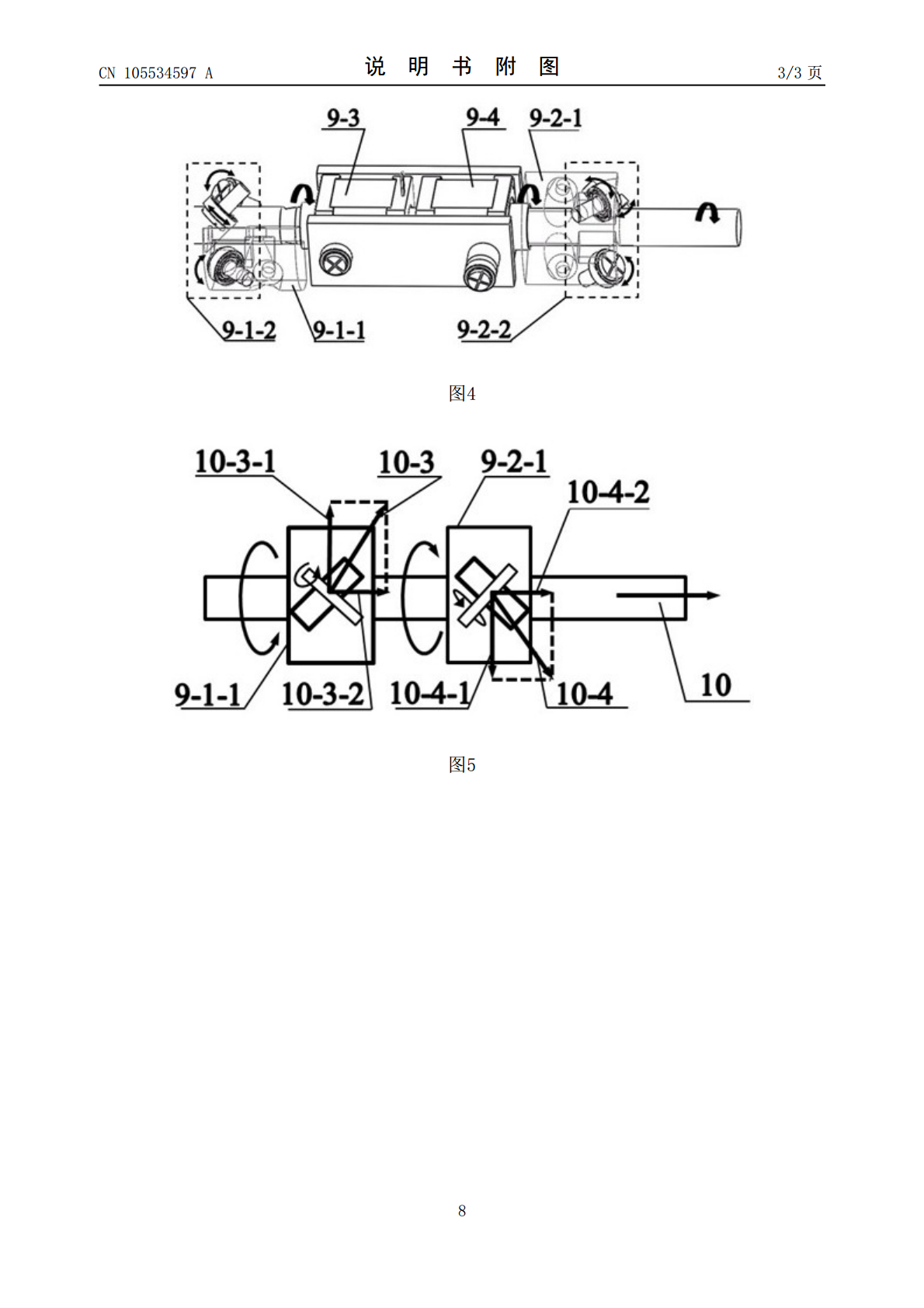
摩擦轮TRUS图像导航驱动装置及方法.pdf

努力****弘毅


1/8

2/8

3/8

4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
摩擦轮TRUS图像导航驱动装置及方法.pdf
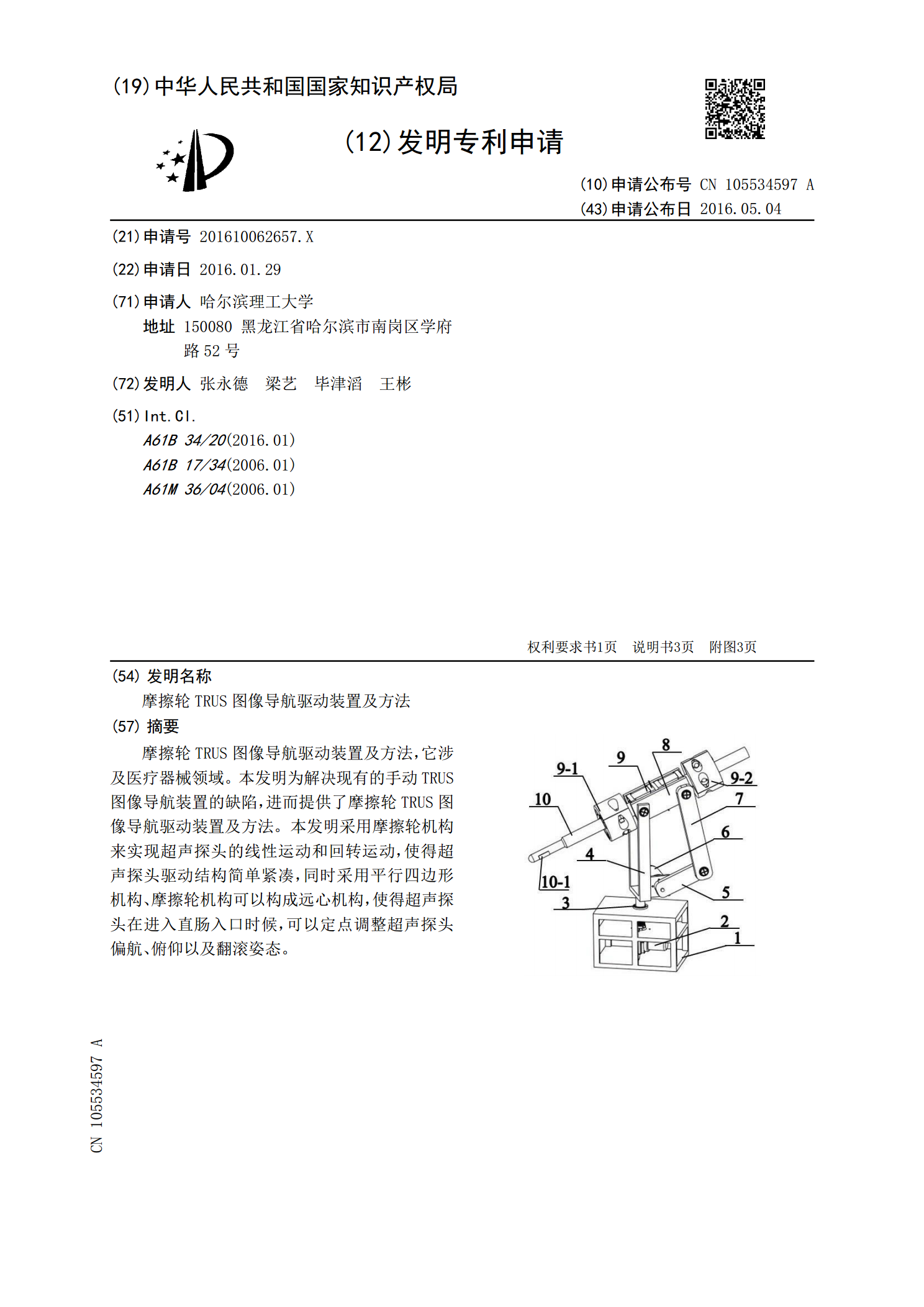
摩擦轮TRUS图像导航驱动装置及方法,它涉及医疗器械领域。本发明为解决现有的手动TRUS图像导航装置的缺陷,进而提供了摩擦轮TRUS图像导航驱动装置及方法。本发明采用摩擦轮机构来实现超声探头的线性运动和回转运动,使得超声探头驱动结构简单紧凑,同时采用平行四边形机构、摩擦轮机构可以构成远心机构,使得超声探头在进入直肠入口时候,可以定点调整超声探头偏航、俯仰以及翻滚姿态。
摩擦轮浮动驱动装置.pdf
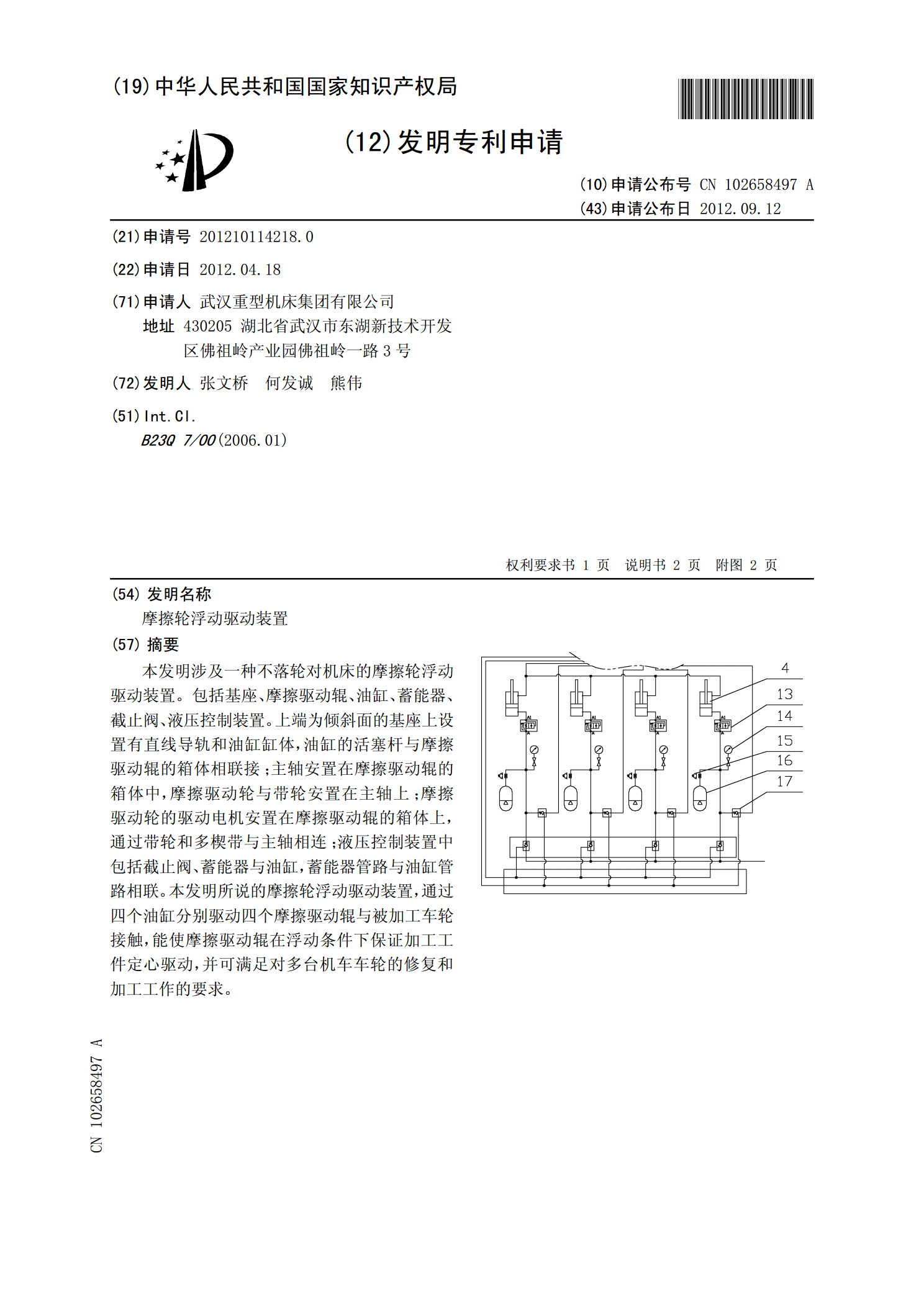
本发明涉及一种不落轮对机床的摩擦轮浮动驱动装置。包括基座、摩擦驱动辊、油缸、蓄能器、截止阀、液压控制装置。上端为倾斜面的基座上设置有直线导轨和油缸缸体,油缸的活塞杆与摩擦驱动辊的箱体相联接;主轴安置在摩擦驱动辊的箱体中,摩擦驱动轮与带轮安置在主轴上;摩擦驱动轮的驱动电机安置在摩擦驱动辊的箱体上,通过带轮和多楔带与主轴相连;液压控制装置中包括截止阀、蓄能器与油缸,蓄能器管路与油缸管路相联。本发明所说的摩擦轮浮动驱动装置,通过四个油缸分别驱动四个摩擦驱动辊与被加工车轮接触,能使摩擦驱动辊在浮动条件下保证加工工

摩擦驱动装置和牵引轮.pdf
本发明公开一种摩擦驱动装置和牵引轮。具体地,一种摩擦驱动装置包括以同轴的关系彼此相对地由框架可转动地支撑的一对驱动盘(48);用于单独地转动致动所述驱动盘的动力源(64);介于所述驱动盘之间的牵引轮(100),所述牵引轮包括枢转地串联连接成环的多个关节活动构件(102)以及由每个关节活动构件可转动地支撑以能够绕沿着所述环延伸的轴线转动的自由滚子(106);以规律的间隔角沿每个驱动盘的周边部分枢转地支撑并且以倾斜的角度接合自由滚子的多个驱动滚子(56)。由此关节活动构件在不要求刚性的环形构件的情况下允许自由

环冷机支撑轮摩擦驱动装置.pdf
本发明公开了一种环冷机支撑轮摩擦驱动装置,支撑轮通过钢轨支撑着回转体,给其中部分支撑轮施加转矩,支撑轮与钢轨接触面产生摩擦力驱动回转体旋转,支撑轮摩擦驱动装置结构简单,成本少,更换快捷,维修方便,在圆周多点布置驱动使回转体局部受力小,回转体整体受力相对均匀不易变形,设备的事故率与维修率低。

一种摩擦轮杆驱动装置.pdf
本发明涉及一种摩擦轮杆驱动装置,具有条形安装板,条形安装板上竖立设有一根中心轴,中心轴上转动设有一块摩擦驱动电机安装转板和从动摩擦轮安装转板,摩擦驱动电机安装转板的一端固定连接有传动换向机构,传动换向机构的一侧与摩擦驱动电机传动连接,传动换向机构的下端连接有一主动摩擦轮,摩擦驱动电机安装转板的另一端还设有弹簧座;从动摩擦轮安装转板的一端向下设有从动摩擦轮固定板,从动摩擦轮固定板上设有从动摩擦轮,从动摩擦轮安装转板的另一端螺纹连接有一根调节螺栓,调节螺栓上配装有调节螺母,在调节螺栓上还套装有矩形弹簧;本发明