
智能运载车及控制方法.pdf

莉娜****ua


1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能运载车及控制方法.pdf
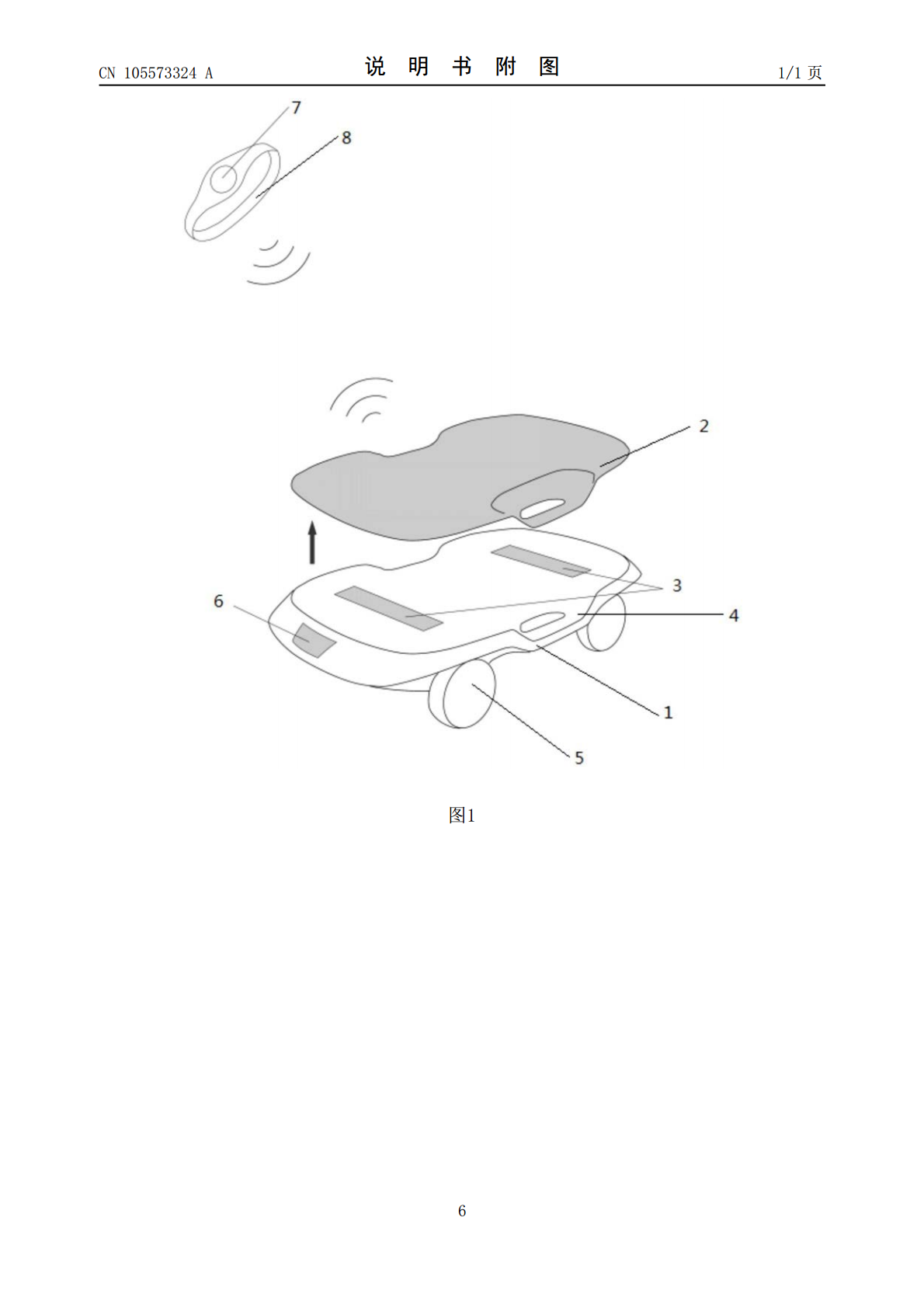
一种智能运载车及控制方法,包括车体和手环两部分,车体包括内置的锂电池、前轮为提供动力的轮毂电机、后轮为万向轮、车体表面镶嵌压电式传感器、车头镶嵌触摸屏、车体内安装有主控板、主控板上有无线通讯模块;手环包括薄膜电池和RFID芯片。并结合其方法避免了无法解放出双手造成了极大的不方便的缺陷。

一种智能运载车及其控制方法.pdf
本发明公开了一种智能运载车及其控制方法,该智能运载车包括外壳以及设置在外壳内的行走总成和举升总成,所述的行走总成对称地安装在机架的两侧,举升总成安装在机架的中央,所述行走总成包括四个车轮,其中两个为驱动轮,另外两个为从动轮;驱动轮为独立驱动,行走电机与驱动轮为一体结构。本发明在智能运载车行走的轨道上按一定的间距布置位置缺口,并将所有的位置缺口在上位机的布置图上进行标记定位,在智能运载车在运行过程中可以通过位置缺口来进行精确定位,不仅简化了控制系统,而且保证智能运载车能够准确进入货位存取货物;同时,本发明的
一种智能运载车.pdf
本发明公开了一种智能运载车,包括外壳以及设置在外壳顶部的举升平台,在外壳内分别设置有行走机构和举升机构,所述行走机构包括行走电机、驱动轮以及从动轮,所述的驱动轮和从动轮分别安装在外壳的两端,在外壳上转动安装有第一驱动轴,在驱动轴的两端安装有驱动轮,所述的行走电机的主轴通过第一链轮机构与驱动轴传动连接;所述举升机构包括举升电机以及固定安装外壳两端的两对举升装置。本发明的四个举升装置均由偏心轮机构实现升降动作,通过中心轴的自转和偏心轮的公转实现举升装置的垂直升降,消除偏心转动存在的左右偏位,同时通过链轮机构传
一种蜂群式运载车协同运载控制系统及方法.pdf
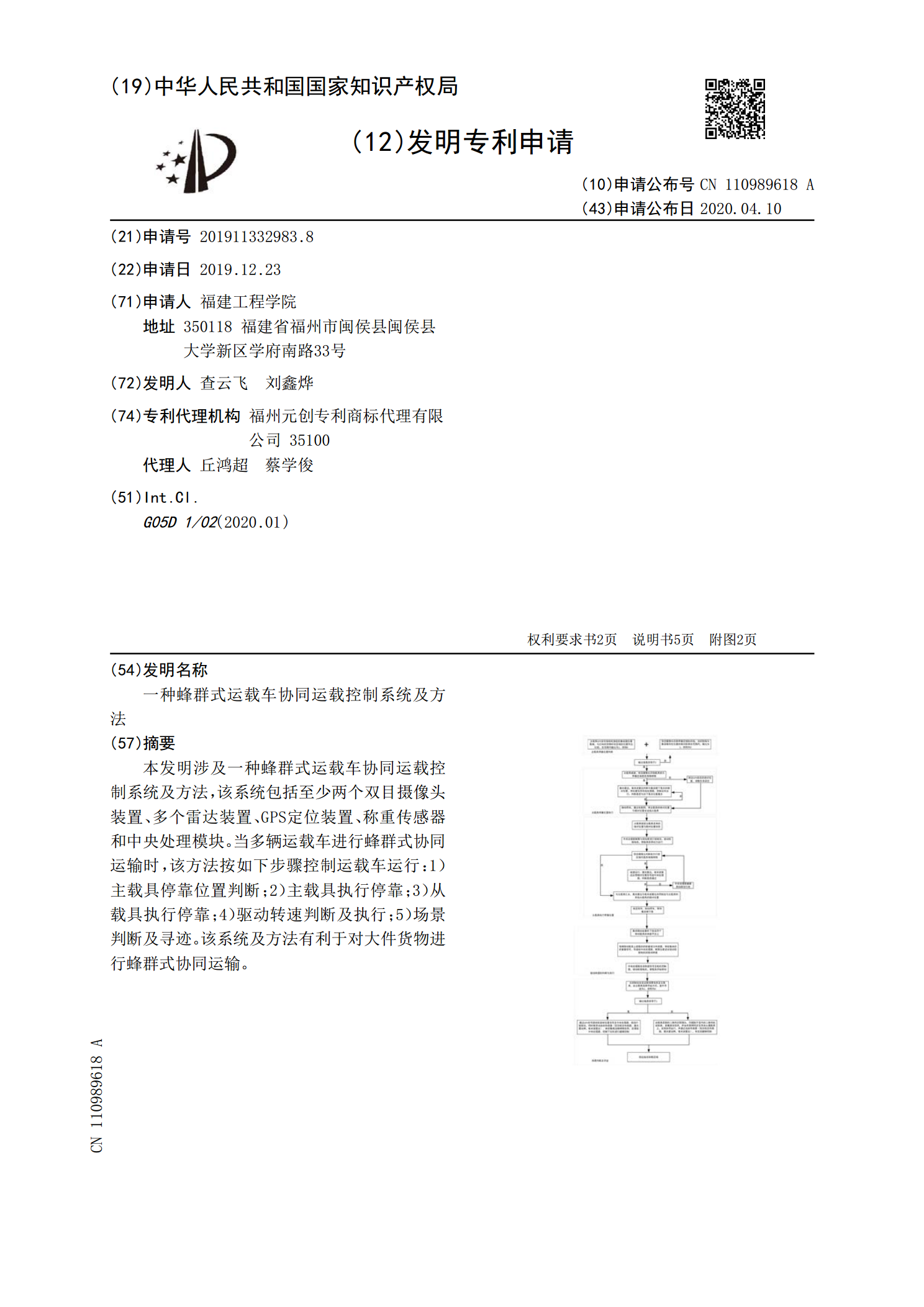
本发明涉及一种蜂群式运载车协同运载控制系统及方法,该系统包括至少两个双目摄像头装置、多个雷达装置、GPS定位装置、称重传感器和中央处理模块。当多辆运载车进行蜂群式协同运输时,该方法按如下步骤控制运载车运行:1)主载具停靠位置判断;2)主载具执行停靠;3)从载具执行停靠;4)驱动转速判断及执行;5)场景判断及寻迹。该系统及方法有利于对大件货物进行蜂群式协同运输。
一种智能运载车的举升机构.pdf
本发明公开了一种智能运载车的举升机构,包括支撑框架以及对称安装在支撑框架两侧的两对升降机,两侧的升降机分别通过伸缩顶杆上的法兰盘与两块升降承载板固定连接,在升降承载板上固定安装有顶板,在其中一侧的两个升降机之间固定安装有双轴电机,双轴电机两端的主轴通过第一联轴器与过渡轴连接,过渡轴通过第二联轴器与升降机的输入轴一端连接,在升降机的输入轴的另一端固定安装有主动同步带轮;本发明的举升装置通过双轴电机来驱动,取代了现有的液压控制系统,简化了智能运载车的举升机构的结构,降低了维护成本,而且使智能运载车的举升机构四