
基于多传感器信息融合的变工况行星齿轮箱故障诊断方法.pdf

猫巷****傲柏

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多传感器信息融合的变工况行星齿轮箱故障诊断方法.pdf
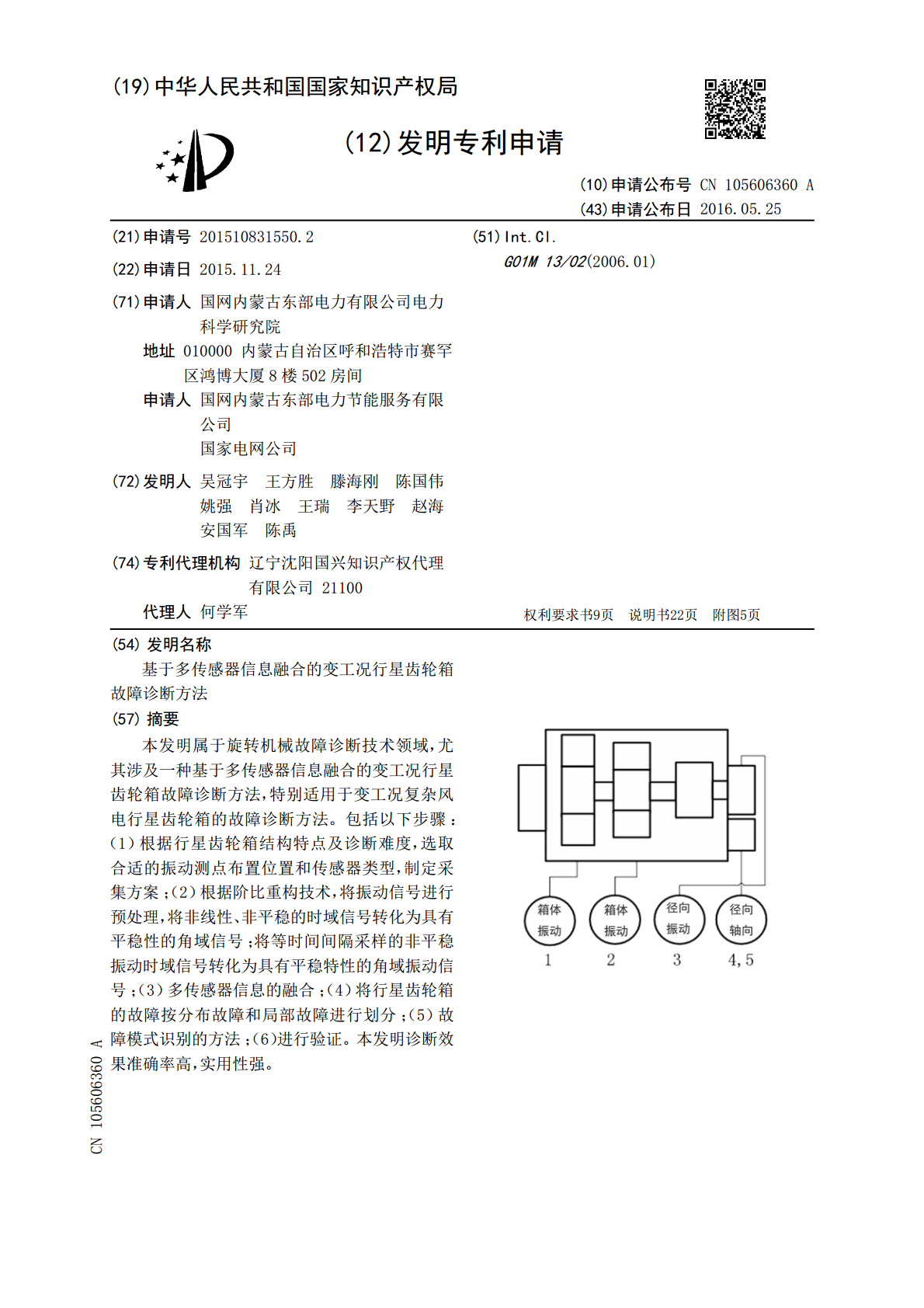
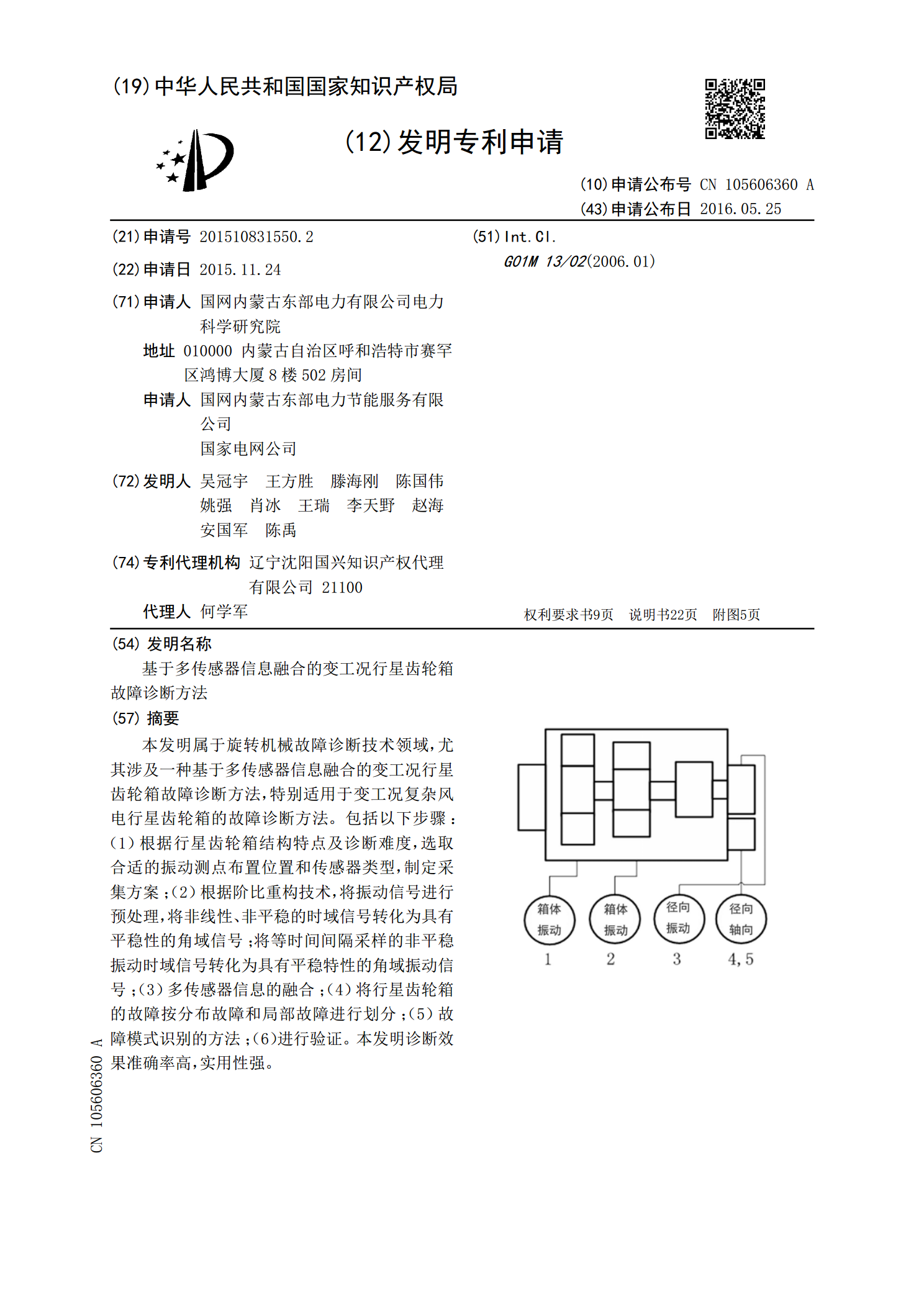
本发明属于旋转机械故障诊断技术领域,尤其涉及一种基于多传感器信息融合的变工况行星齿轮箱故障诊断方法,特别适用于变工况复杂风电行星齿轮箱的故障诊断方法。包括以下步骤:(1)根据行星齿轮箱结构特点及诊断难度,选取合适的振动测点布置位置和传感器类型,制定采集方案;(2)根据阶比重构技术,将振动信号进行预处理,将非线性、非平稳的时域信号转化为具有平稳性的角域信号;将等时间间隔采样的非平稳振动时域信号转化为具有平稳特性的角域振动信号;(3)多传感器信息的融合;(4)将行星齿轮箱的故障按分布故障和局部故障进行划分;(
基于散度指标的变工况风电行星齿轮箱故障诊断方法.pdf
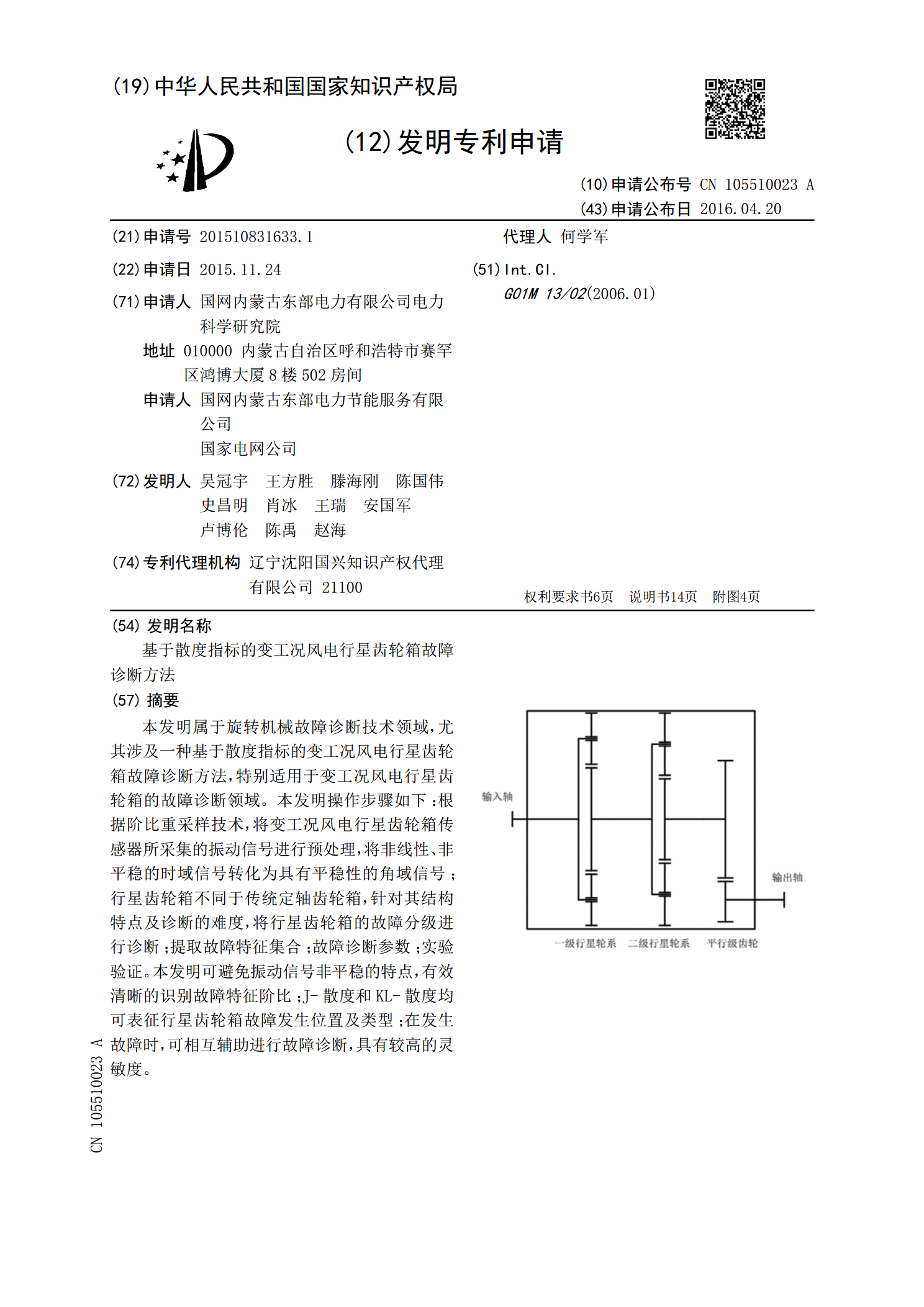
本发明属于旋转机械故障诊断技术领域,尤其涉及一种基于散度指标的变工况风电行星齿轮箱故障诊断方法,特别适用于变工况风电行星齿轮箱的故障诊断领域。本发明操作步骤如下:根据阶比重采样技术,将变工况风电行星齿轮箱传感器所采集的振动信号进行预处理,将非线性、非平稳的时域信号转化为具有平稳性的角域信号;行星齿轮箱不同于传统定轴齿轮箱,针对其结构特点及诊断的难度,将行星齿轮箱的故障分级进行诊断;提取故障特征集合;故障诊断参数;实验验证。本发明可避免振动信号非平稳的特点,有效清晰的识别故障特征阶比;J-散度和KL-散度均

基于多信息融合和卷积神经网络的行星齿轮箱故障诊断.pptx
行星齿轮箱故障诊断目录添加目录项标题行星齿轮箱故障诊断原理多信息融合技术卷积神经网络故障诊断流程诊断准确率多信息融合技术应用振动信号采集温度和油液信息融合声发射信号处理特征提取与分类卷积神经网络模型构建网络结构选择卷积层设计池化层与全连接层训练与优化行星齿轮箱故障诊断实验数据集准备实验环境搭建模型训练与验证结果分析诊断系统实现与验证系统架构设计诊断算法集成系统测试与验证实际应用案例感谢观看

基于双对抗编码的时变工况下行星齿轮箱智能故障诊断.pptx
基于双对抗编码的时变工况下行星齿轮箱智能故障诊断目录双对抗编码原理编码原理介绍编码在故障诊断中的应用双对抗编码的优势编码模型建立时变工况下的故障特征提取时变工况介绍故障特征提取方法特征提取的难点与挑战特征提取的实验验证行星齿轮箱故障机理分析行星齿轮箱结构与工作原理常见故障类型及原因故障对系统的影响分析故障案例分析智能故障诊断算法设计诊断算法框架诊断算法流程诊断算法优化策略诊断算法实验验证诊断系统实现与验证系统总体架构数据采集与预处理模块特征提取与处理模块诊断结果输出模块系统性能评估与优化结论与展望研究成果

基于多特征融合的行星齿轮箱点蚀故障诊断研究.pptx
基于多特征融合的行星齿轮箱点蚀故障诊断研究目录添加章节标题行星齿轮箱点蚀故障概述故障定义与表现故障产生的原因和影响传统故障诊断方法多特征融合在故障诊断中的应用特征提取特征融合的原理与方法与其他方法的比较基于多特征融合的行星齿轮箱点蚀故障诊断流程数据采集与预处理特征提取与优化特征融合与分类诊断结果评估实验验证与结果分析实验平台与数据集实验过程与参数设置实验结果与分析结果比较与讨论结论与展望研究结论研究局限与不足未来研究方向THANKYOU