
一种空心砖自动码垛机.pdf

是浩****32

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空心砖自动码垛机.pdf
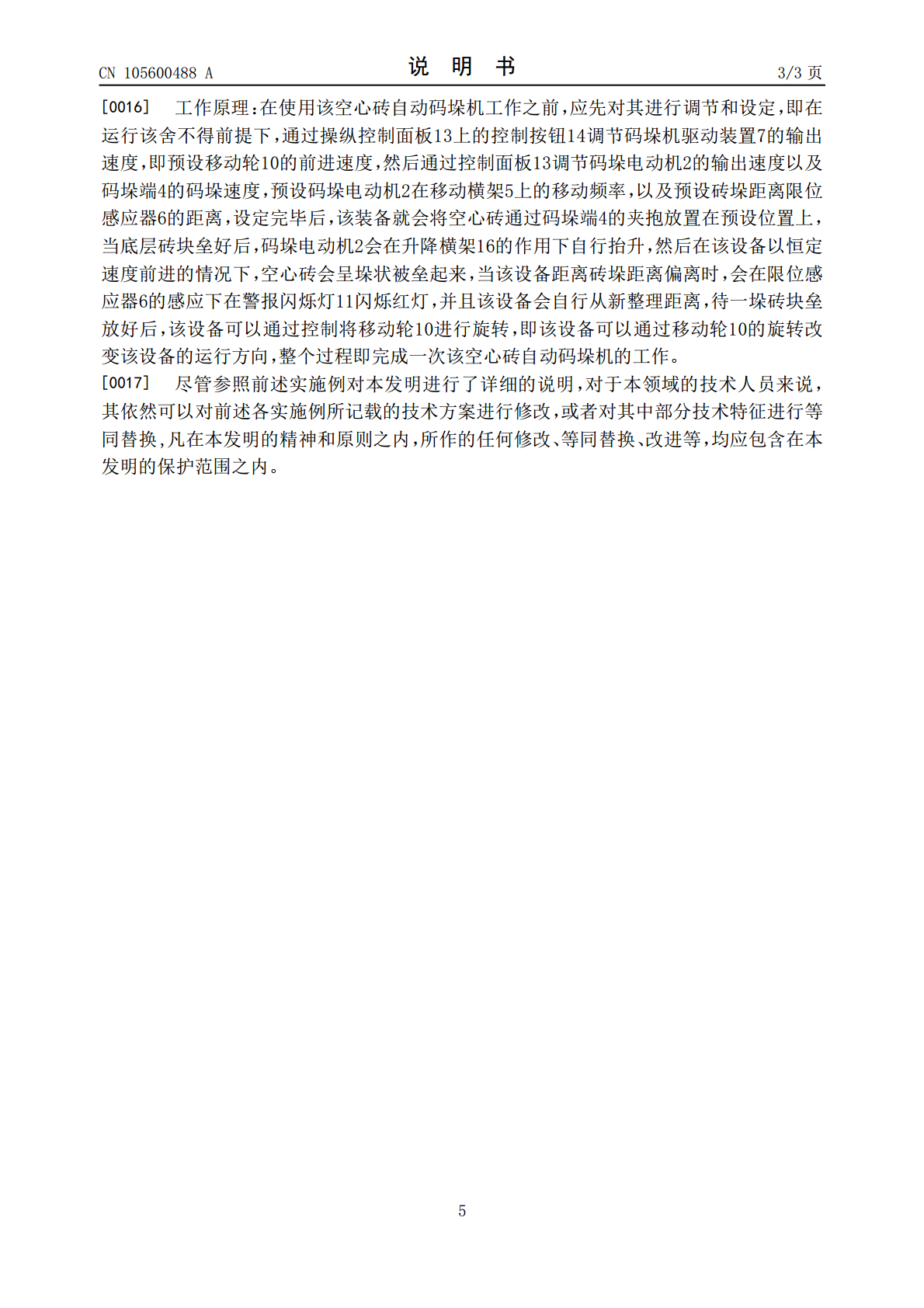
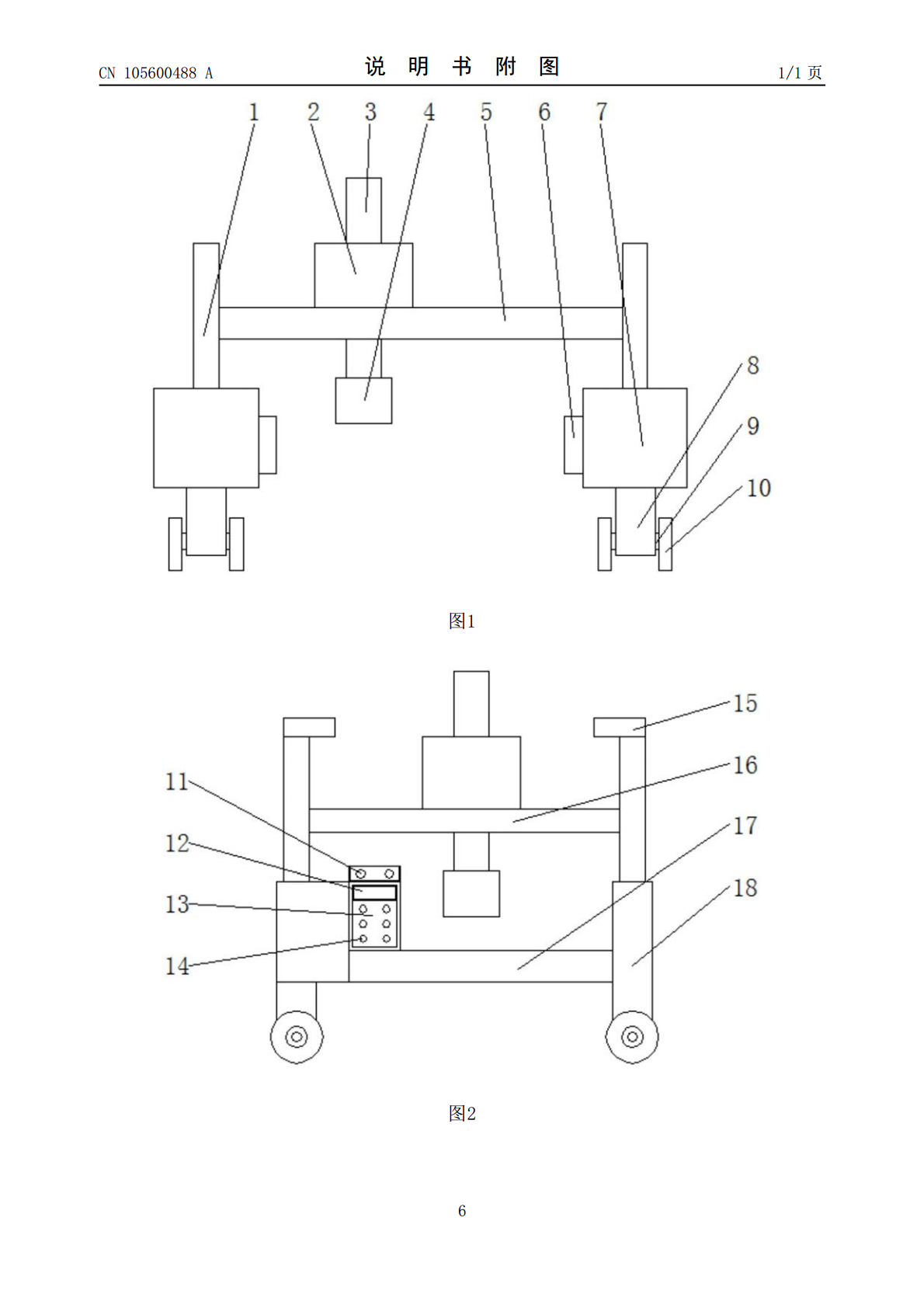
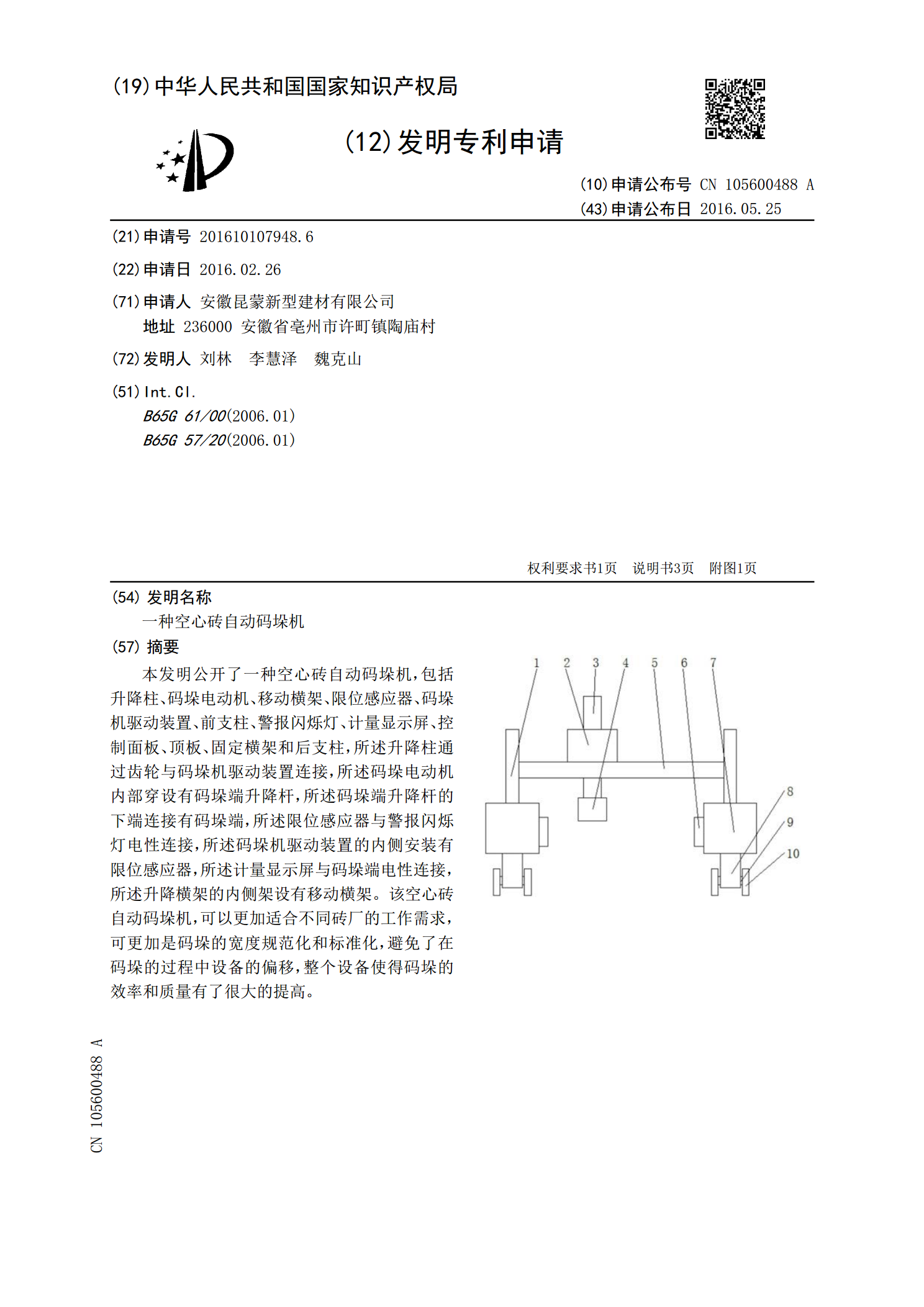
本发明公开了一种空心砖自动码垛机,包括升降柱、码垛电动机、移动横架、限位感应器、码垛机驱动装置、前支柱、警报闪烁灯、计量显示屏、控制面板、顶板、固定横架和后支柱,所述升降柱通过齿轮与码垛机驱动装置连接,所述码垛电动机内部穿设有码垛端升降杆,所述码垛端升降杆的下端连接有码垛端,所述限位感应器与警报闪烁灯电性连接,所述码垛机驱动装置的内侧安装有限位感应器,所述计量显示屏与码垛端电性连接,所述升降横架的内侧架设有移动横架。该空心砖自动码垛机,可以更加适合不同砖厂的工作需求,可更加是码垛的宽度规范化和标准化,避免
一种智能空心砖码垛机.pdf
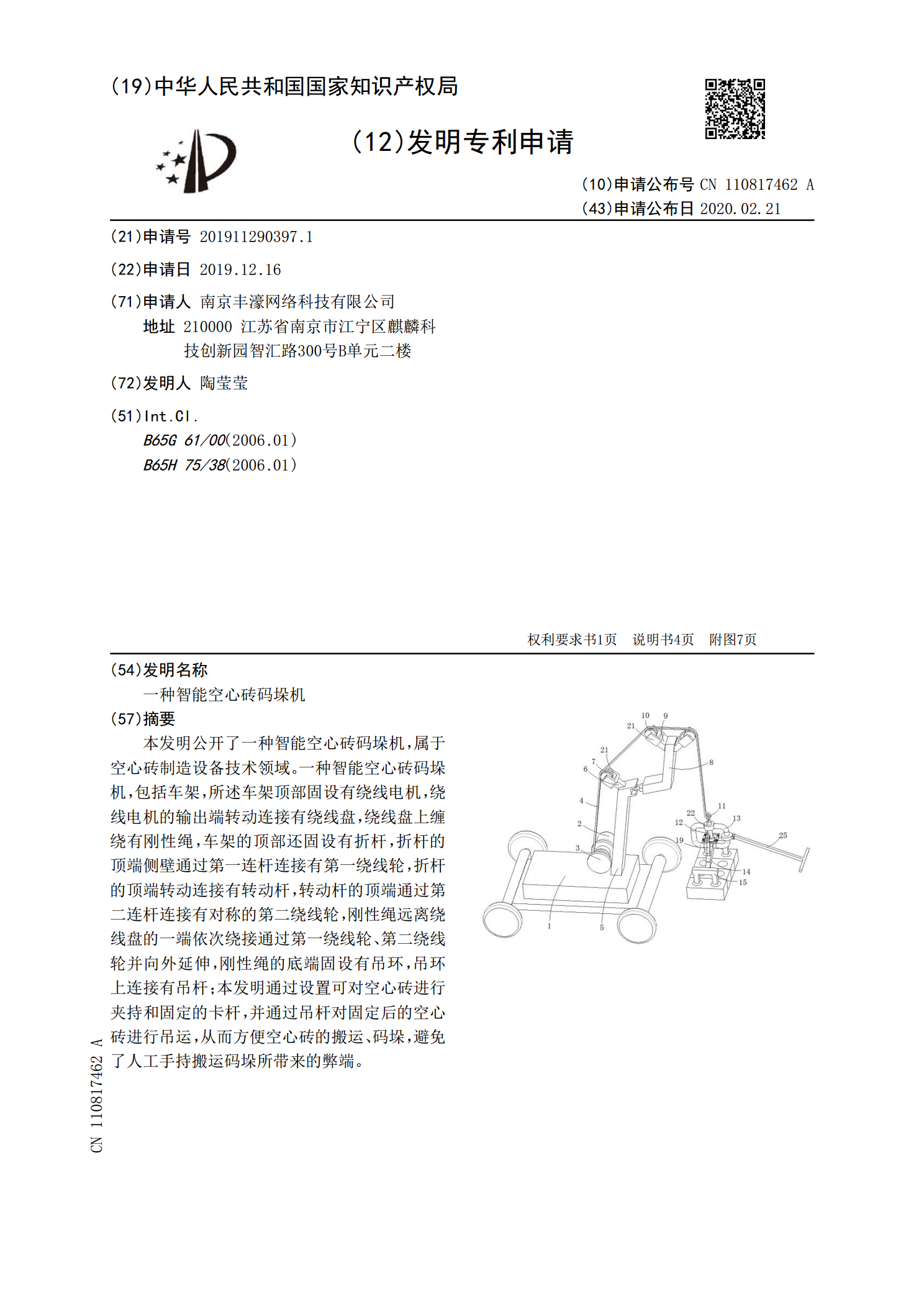
本发明公开了一种智能空心砖码垛机,属于空心砖制造设备技术领域。一种智能空心砖码垛机,包括车架,所述车架顶部固设有绕线电机,绕线电机的输出端转动连接有绕线盘,绕线盘上缠绕有刚性绳,车架的顶部还固设有折杆,折杆的顶端侧壁通过第一连杆连接有第一绕线轮,折杆的顶端转动连接有转动杆,转动杆的顶端通过第二连杆连接有对称的第二绕线轮,刚性绳远离绕线盘的一端依次绕接通过第一绕线轮、第二绕线轮并向外延伸,刚性绳的底端固设有吊环,吊环上连接有吊杆;本发明通过设置可对空心砖进行夹持和固定的卡杆,并通过吊杆对固定后的空心砖进行吊
一种智能空心砖码垛机.pdf
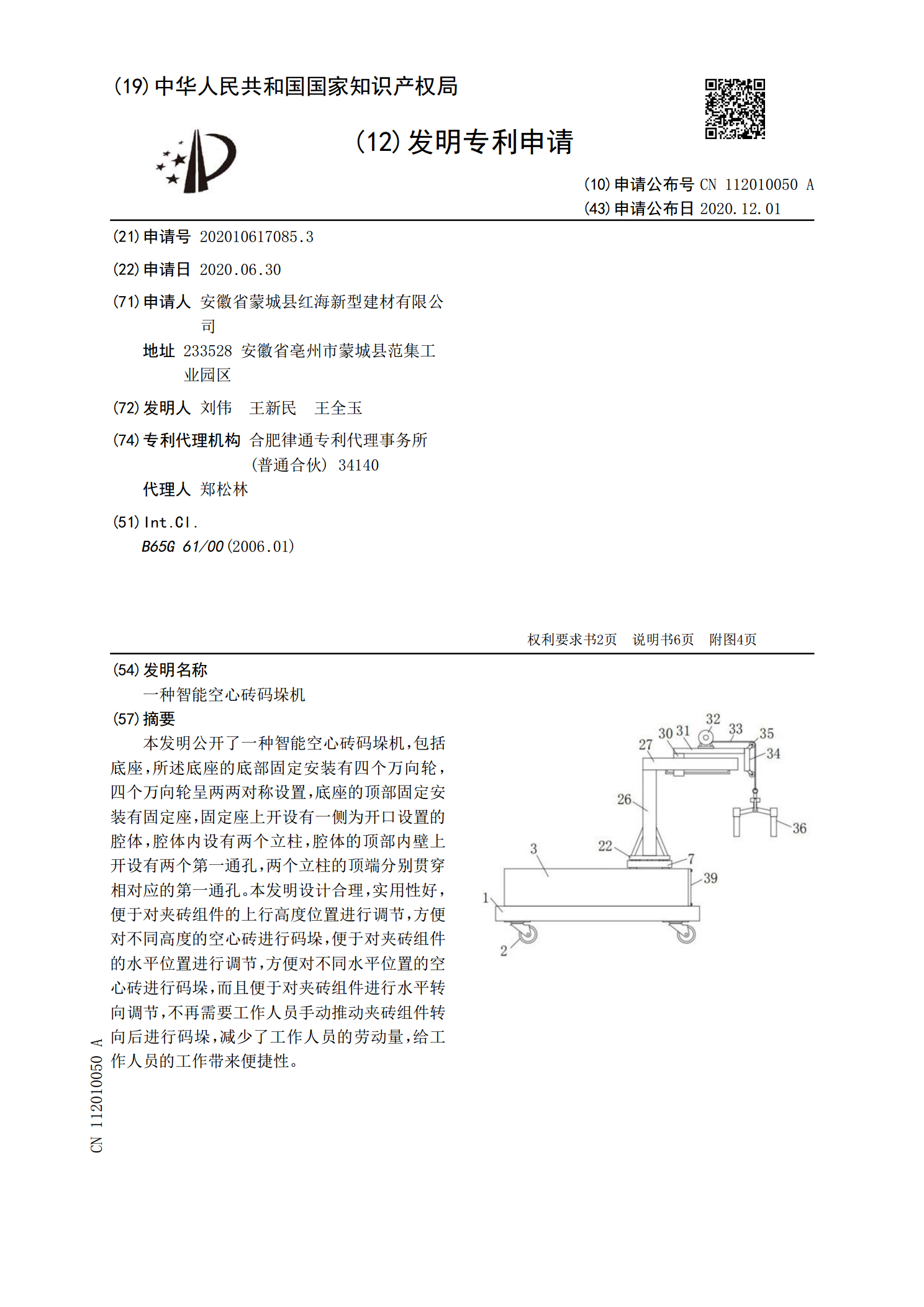
本发明公开了一种智能空心砖码垛机,包括底座,所述底座的底部固定安装有四个万向轮,四个万向轮呈两两对称设置,底座的顶部固定安装有固定座,固定座上开设有一侧为开口设置的腔体,腔体内设有两个立柱,腔体的顶部内壁上开设有两个第一通孔,两个立柱的顶端分别贯穿相对应的第一通孔。本发明设计合理,实用性好,便于对夹砖组件的上行高度位置进行调节,方便对不同高度的空心砖进行码垛,便于对夹砖组件的水平位置进行调节,方便对不同水平位置的空心砖进行码垛,而且便于对夹砖组件进行水平转向调节,不再需要工作人员手动推动夹砖组件转向后进行

一种自动码垛机.pdf
本发明公开了一种自动码垛机,包括PLC触控集成控制系统、皮带自动输送机、落包系统、码垛机框架、光电开关组件、液压油泵系统,码垛机框架包括底座,底座的顶部左右两侧均设置有支撑架,两组支撑架的顶部设置有上框架,底座的左侧设置有液压油泵,底座的顶部中心处设置有液压升降平台,液压升降平台的顶部等间距的排布有缓震支撑块;缓震支撑块包括安装座,安装座的顶部左右两侧对称开设有螺栓孔,安装座的顶部中心处设置有限位座,限位座的内腔底部设置有弹簧,弹簧的顶部设置有活动块,活动块的顶部设置有连接柱,连接柱的顶部设置有支撑板,本
一种用于空心砖的自动码垛装置.pdf
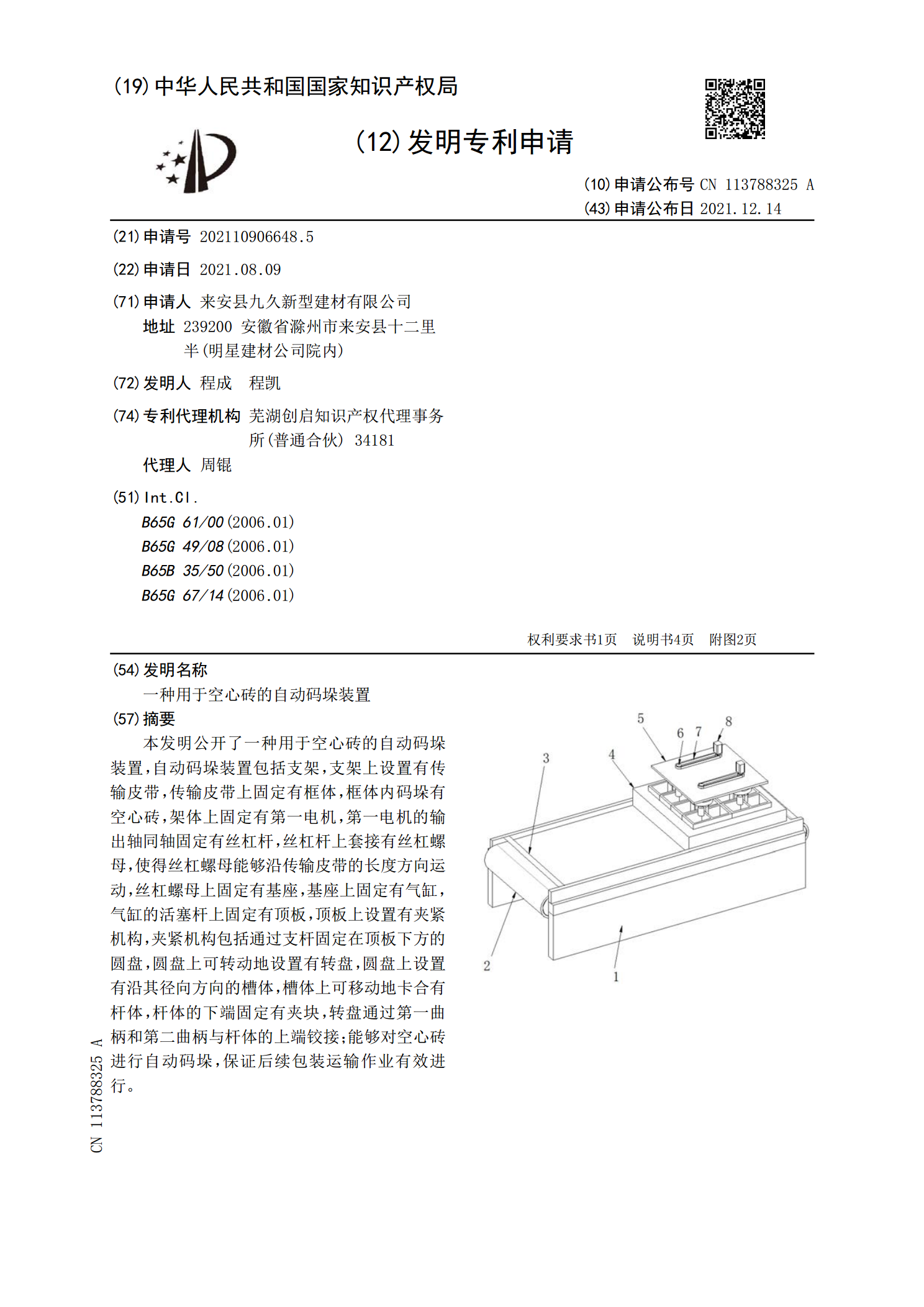
本发明公开了一种用于空心砖的自动码垛装置,自动码垛装置包括支架,支架上设置有传输皮带,传输皮带上固定有框体,框体内码垛有空心砖,架体上固定有第一电机,第一电机的输出轴同轴固定有丝杠杆,丝杠杆上套接有丝杠螺母,使得丝杠螺母能够沿传输皮带的长度方向运动,丝杠螺母上固定有基座,基座上固定有气缸,气缸的活塞杆上固定有顶板,顶板上设置有夹紧机构,夹紧机构包括通过支杆固定在顶板下方的圆盘,圆盘上可转动地设置有转盘,圆盘上设置有沿其径向方向的槽体,槽体上可移动地卡合有杆体,杆体的下端固定有夹块,转盘通过第一曲柄和第二曲