
采用单一面部表面肌电信号的智能轮椅控制装置及方法.pdf

是你****噩呀

1/7
2/7
3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
采用单一面部表面肌电信号的智能轮椅控制装置及方法.pdf
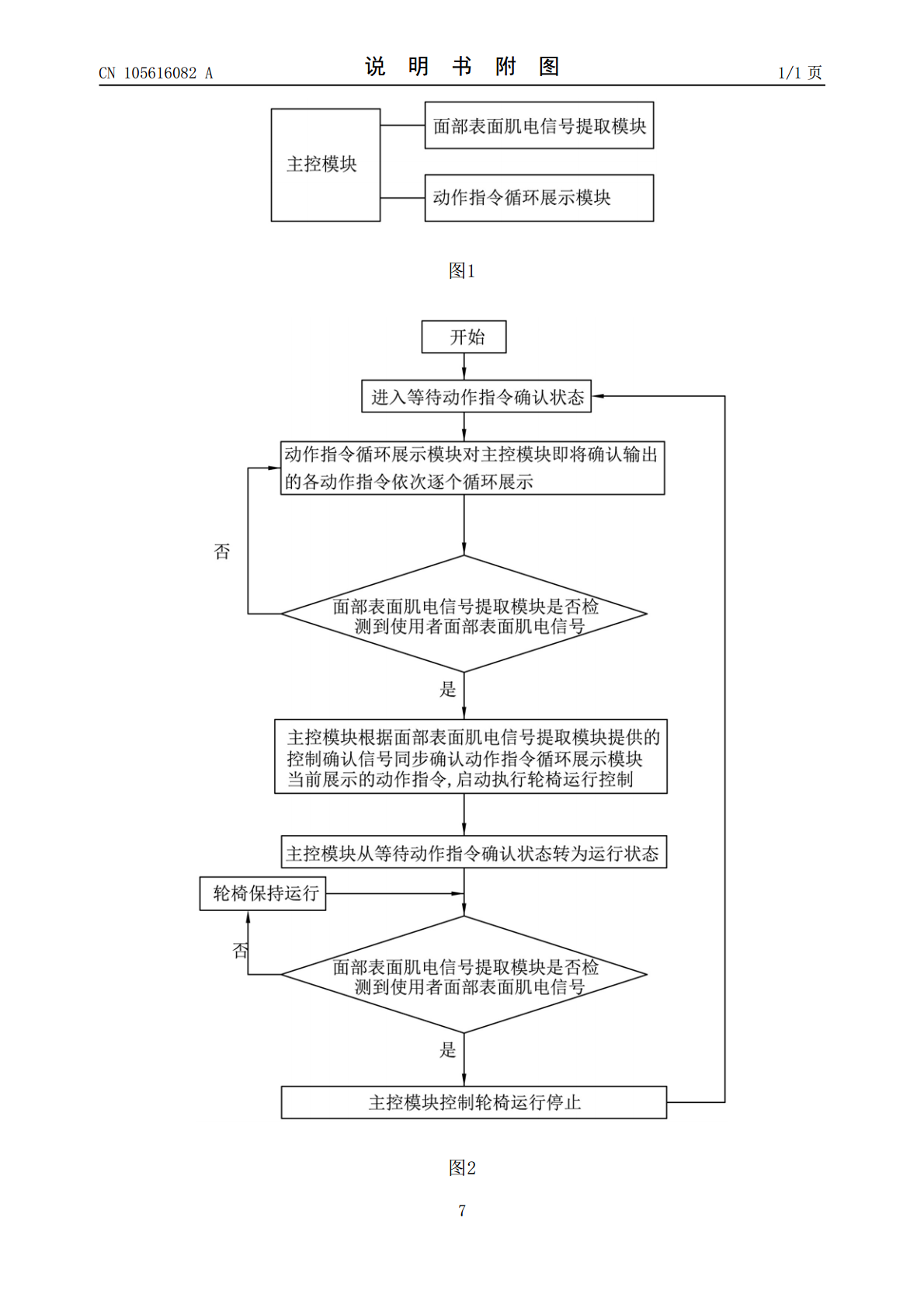
采用单一面部表面肌电信号的智能轮椅控制装置及方法,涉及到智能轮椅技术领域,具体涉及到智能轮椅的控制装置和控制方法方面。包括有主控模块,主控模块连接有面部表面肌电信号提取模块和动作指令循环展示模块;面部表面肌电信号提取模块,用于检测使用者单一的面部表面肌电信号,为主控模块即将输出的动作指令提供控制确认信号或停止信号;动作指令循环展示模块,用于循环展示主控模块即将确认输出的动作指令。采用单一的面部表面肌电信号就能完成对智能轮椅的操控,避免了对多种面部表面肌电信号提取时的误差,提高了控制准确率,能满足对智能轮椅

肌电信号在智能轮椅中的应用.docx
肌电信号在智能轮椅中的应用肌电信号在智能轮椅中的应用摘要:随着技术的不断进步和人们对残障人士关注的增加,智能轮椅作为一种辅助工具已越来越受到关注。肌电信号作为一种测量和记录肌肉活动的生物电信号,被广泛应用于智能轮椅中,以实现对轮椅的精准控制。本文将探讨肌电信号在智能轮椅中的应用,包括肌电信号的获取、信号处理与识别,以及智能轮椅的控制策略与实际应用。在智能轮椅系统中应用肌电信号可以提高残障人士的生活质量,增强其行动的自主性和便利性。关键词:肌电信号,智能轮椅,控制策略,信号处理,实际应用引言:智能辅助工具的
表面肌电信号后处理方法、装置.pdf
本发明实施例提供了一种表面肌电信号后处理方法、装置,所述方法包括:获取第一表面肌电信号以及第二表面肌电信号,并确定所述第一表面肌电信号中第一有效电位段,及所述第二表面肌电信号中第二有效电位段;基于多个不同长度的时间窗中任一时间窗,从所述第一有效电位段中提取多个第一特征,及从所述第二有效电位段中提取多个第二特征;将多个所述第一特征与多个所述第二特征,基于预设拼接规则拼接生成多个特征向量,利用预设分类器对每个所述特征向量进行分类识别;从分类识别结果中确定所述第一表面肌电信号与所述第二表面肌电信号对应的目标分类

一种肩颈部肌电信号识别的智能轮椅控制方法.docx
一种肩颈部肌电信号识别的智能轮椅控制方法近年来,随着科技的不断发展,智能轮椅越来越受到人们的关注。智能轮椅作为一种辅助工具,为肢体不便的人提供了更多的便利和自主性。然而,由于肌肉疾病导致的肢体不便致使患者肢体功能障碍甚至无法正常使用手柄对轮椅进行控制,从而导致他们对生活质量的影响。此时,肌电信号识别技术就显得十分重要,可以通过肌电信号识别对使用者的肌肉电活动进行监测,形成信号并传输到智能轮椅系统中,达到智能控制轮椅的目的。肌电信号识别技术是指分析肌肉的电活动并将其转换为控制信号的技术。这种技术既可用于运动

基于前臂表面肌电信号控制的智能小车设计.docx
基于前臂表面肌电信号控制的智能小车设计摘要本文基于前臂表面肌电信号,设计了一种智能小车控制方案。首先,介绍了肌电信号的基本概念和检测方法,然后阐述了采用前臂表面肌电信号控制小车的技术原理,包括信号采集、信号处理和控制输出等过程。接着,详细介绍了智能小车的硬件设计和软件实现,包括选择合适的电机、传感器和控制板等硬件部分,以及编写电机控制程序、肌电信号检测程序和控制算法等软件部分。最后,进行了实验验证,结果表明,本文所设计的智能小车控制系统能够有效地实现前臂表面肌电信号控制,可望为智能化控制领域的发展提供借鉴