
一种用于仿生爬梯机器人的爬杆机构.pdf

是浩****32


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于仿生爬梯机器人的爬杆机构.pdf
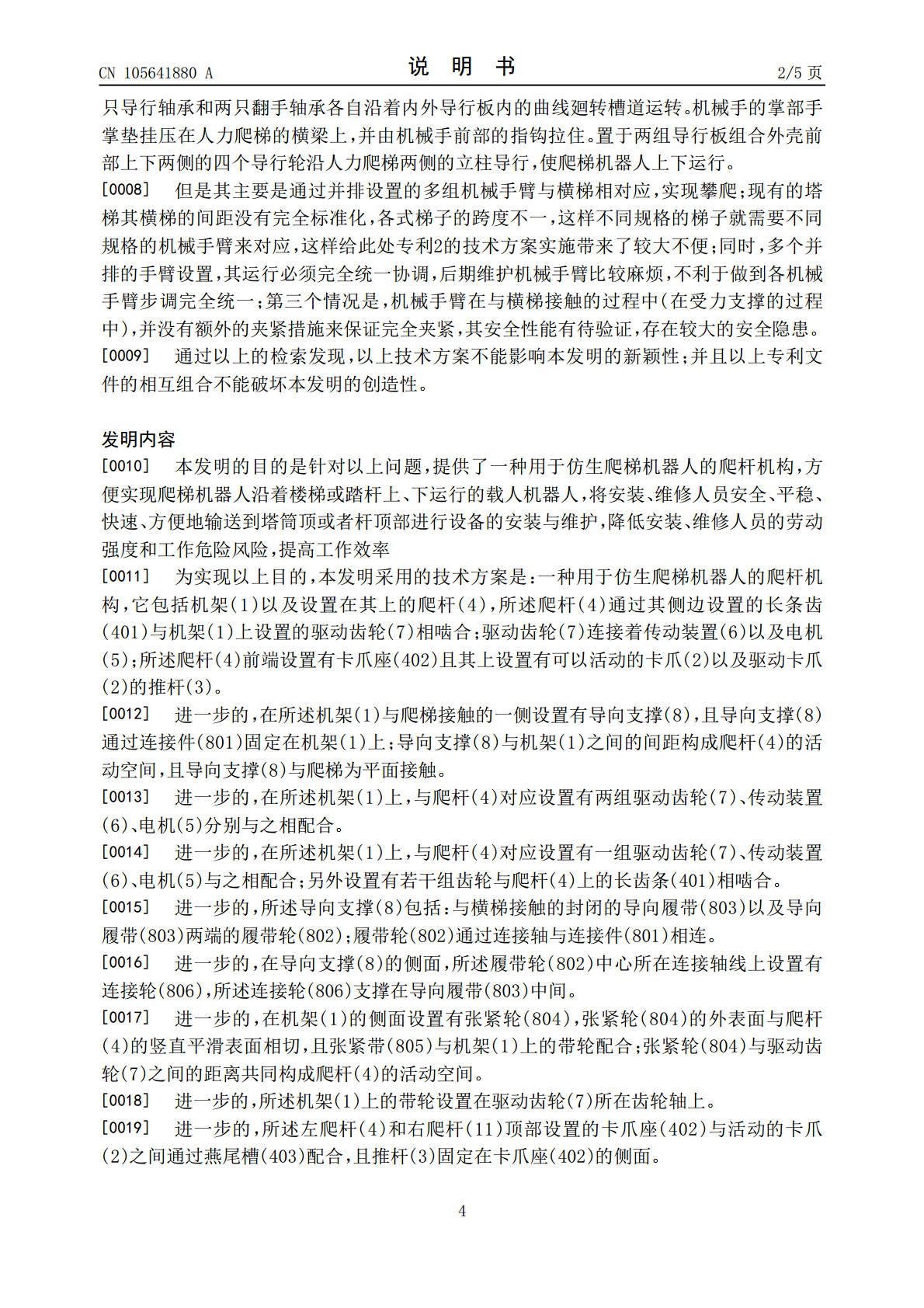
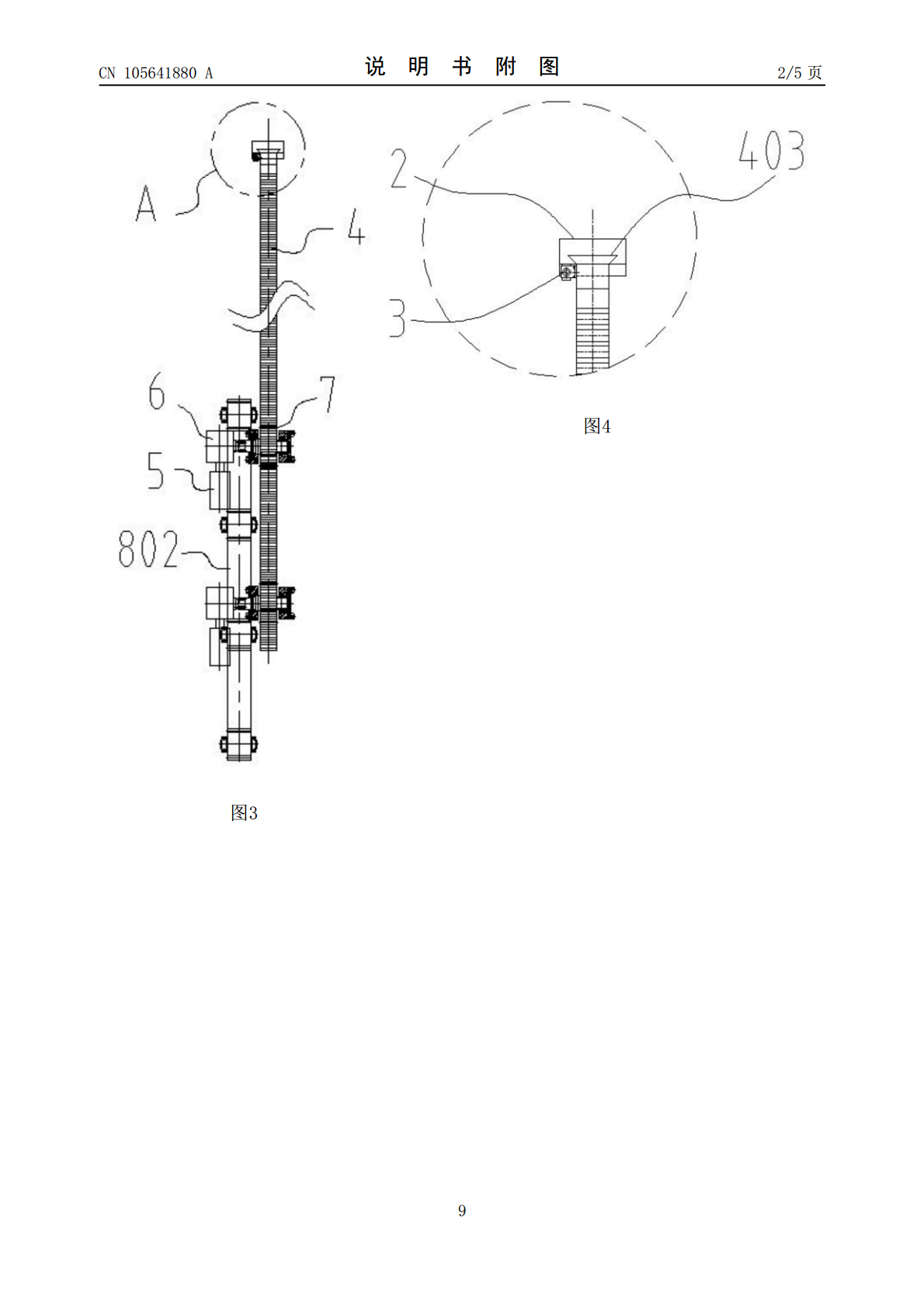
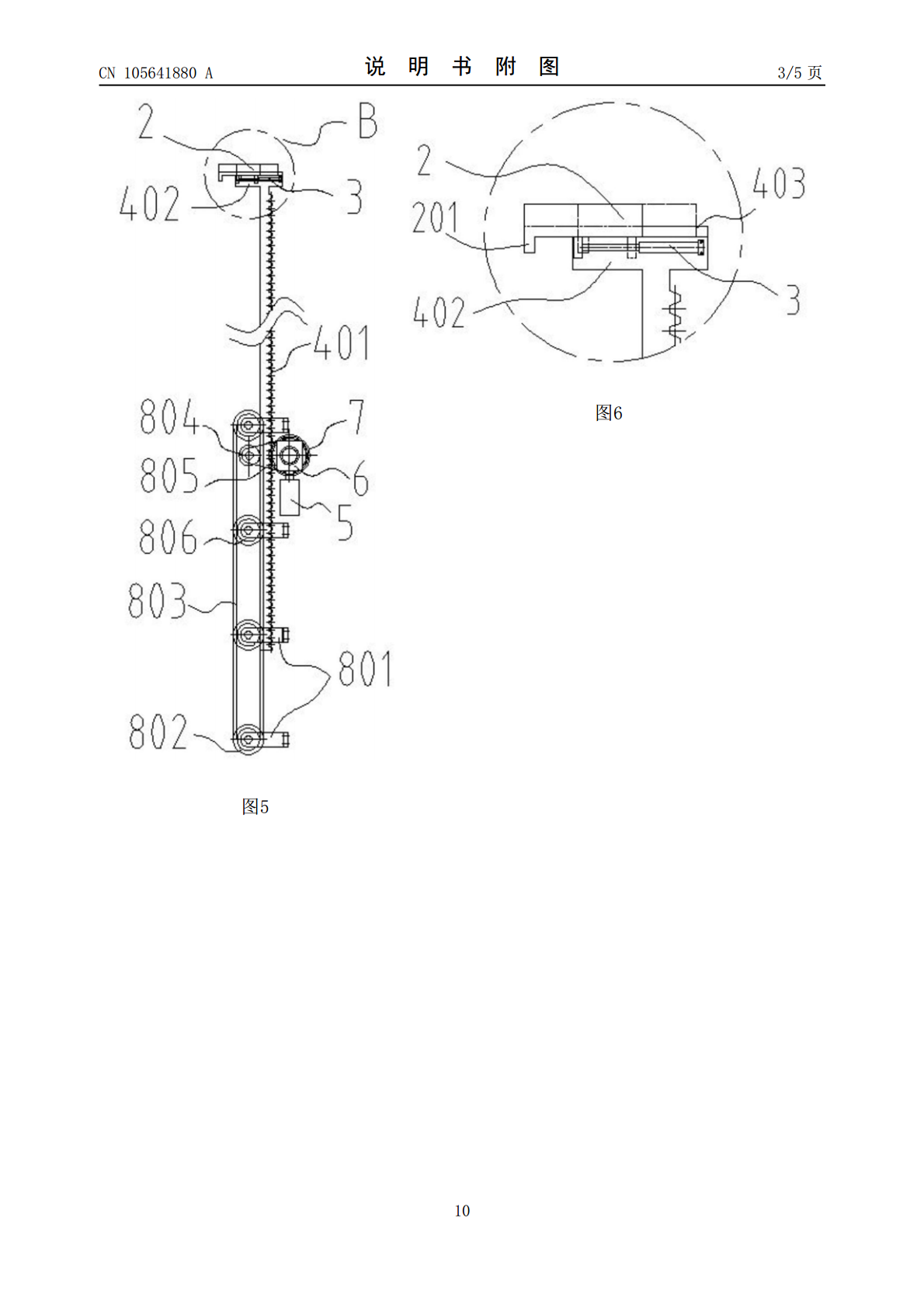
本发明公布了一种用于仿生爬梯机器人的爬杆机构,它包括机架以及设置在其上的爬杆,所述爬杆通过其侧边设置的长条齿与机架上设置的驱动齿轮相啮合;驱动齿轮连接着传动装置以及电机;所述爬杆前端设置有卡爪座且其上设置有可以活动的卡爪以及驱动卡爪的推杆。本发明的目的是提供了一种用于仿生爬梯机器人的爬杆机构,方便实现爬梯机器人沿着楼梯或踏杆上、下运行的载人机器人,将安装、维修人员安全、平稳、快速、方便地输送到塔筒顶或者杆顶部进行设备的安装与维护,降低安装、维修人员的劳动强度和工作危险风险,提高工作效率。
一种仿生式爬杆机器人.pdf
本发明涉及爬杆机器人技术领域,具体涉及一种仿生式爬杆机器人,采用了一种全新的思路,通过行走组件的上下伸缩动作与上壳体上的夹持组件、下壳体上的夹持组件的开闭动作相配合,实现了攀爬动作;本发明通过调节夹持组件上夹紧部件的紧定片的位置,可实现夹持力的调节,以适应不同直径杆状物;本发明通过不完全齿轮的周期性啮合来控制各个组件的协调运动,同时在非啮合区间时能够实现自动锁死,达到夹持的目的,比单纯靠电动机驱动力来夹持更经济,而且更加稳定;本发明的上下壳体均能挂载其他工作装置,能够实现各种工程实际需求,满足现实需要的同
一种用于爬杆检测机器人.pdf
本发明提供一种用于爬杆检测机器人,包括攀爬机构、上下夹持机构、清洗机构以及腰部回转机构在攀爬过程中,由下夹持机构夹紧杆体,同时上夹持机构松开,回转执行器工作,电机旋转,连杆伸长,推动清洗机构及上夹持机构上升,连杆伸至指定位置后,上夹持机构夹紧,下夹持机构放松,回转执行器工作,使连杆收缩,完成一次攀爬动作。在机器攀爬过程中,即执行器工作时,连杆伸长同时,腰部回转机构工作,齿轮转动使其与弧形导轨发生相对转动,带动清洗机构及上夹持器围绕杆体转动,完成一次腰部回转动作。
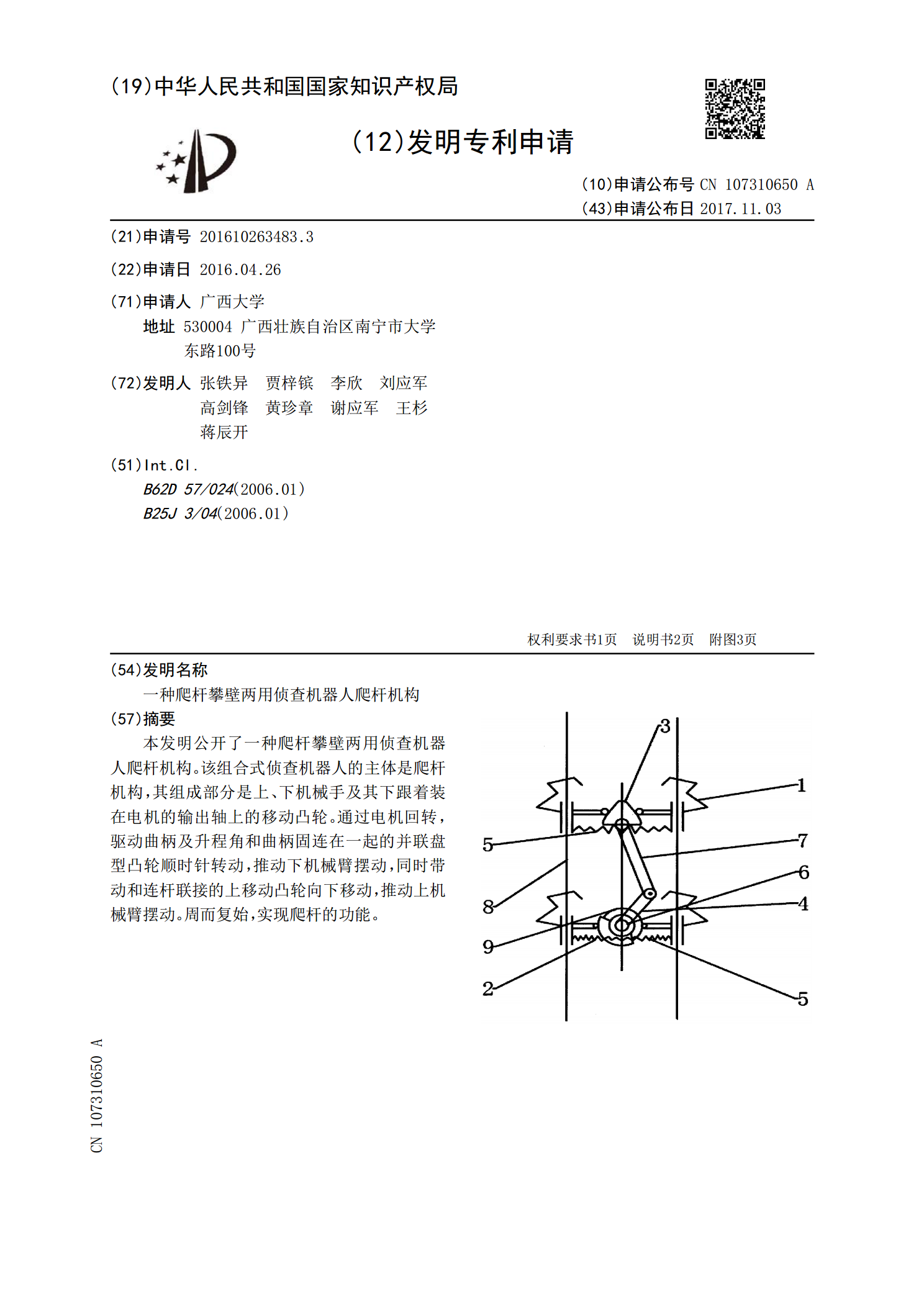
一种爬杆攀壁两用侦查机器人爬杆机构.pdf
本发明公开了一种爬杆攀壁两用侦查机器人爬杆机构。该组合式侦查机器人的主体是爬杆机构,其组成部分是上、下机械手及其下跟着装在电机的输出轴上的移动凸轮。通过电机回转,驱动曲柄及升程角和曲柄固连在一起的并联盘型凸轮顺时针转动,推动下机械臂摆动,同时带动和连杆联接的上移动凸轮向下移动,推动上机械臂摆动。周而复始,实现爬杆的功能。
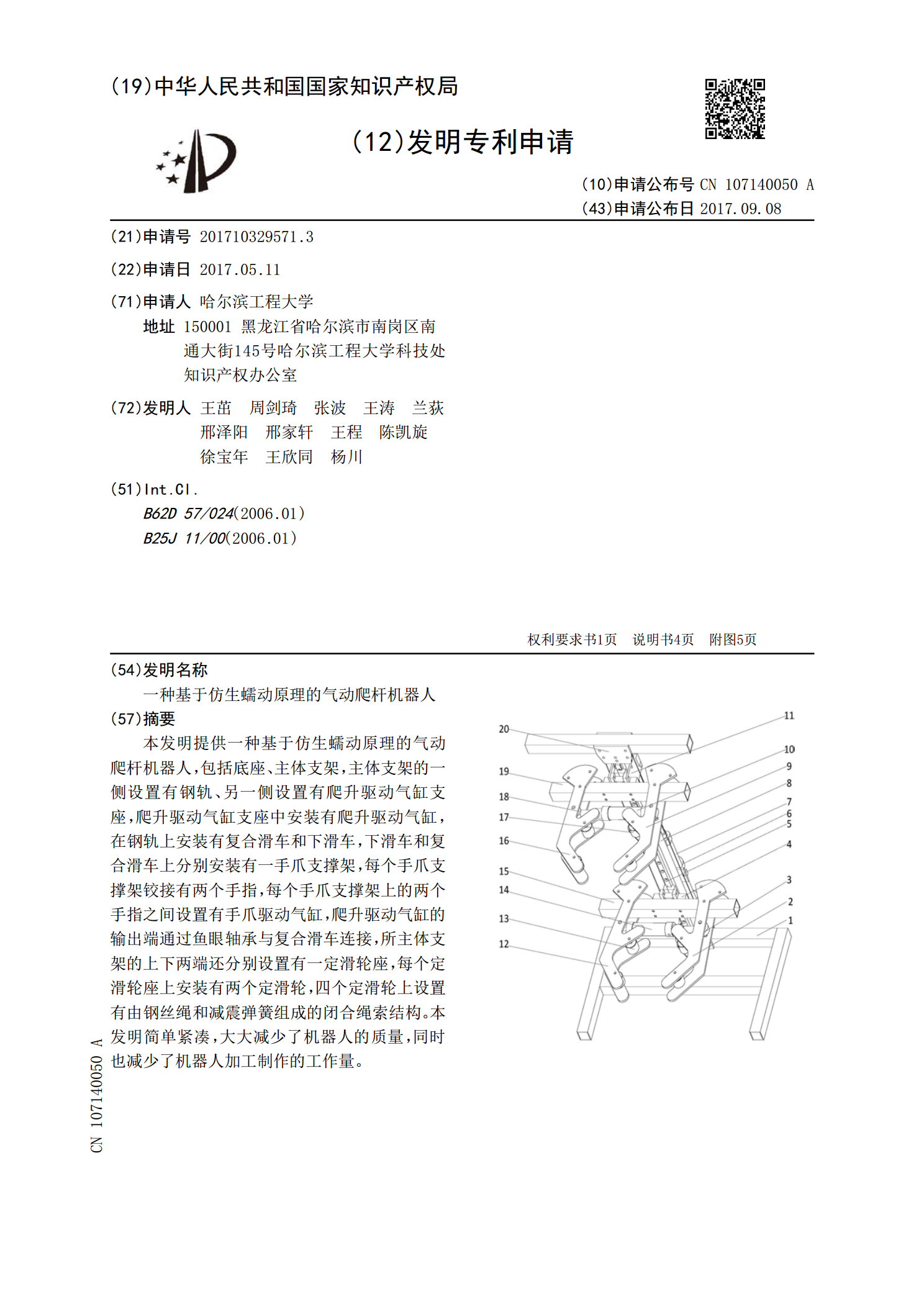
一种基于仿生蠕动原理的气动爬杆机器人.pdf
本发明提供一种基于仿生蠕动原理的气动爬杆机器人,包括底座、主体支架,主体支架的一侧设置有钢轨、另一侧设置有爬升驱动气缸支座,爬升驱动气缸支座中安装有爬升驱动气缸,在钢轨上安装有复合滑车和下滑车,下滑车和复合滑车上分别安装有一手爪支撑架,每个手爪支撑架铰接有两个手指,每个手爪支撑架上的两个手指之间设置有手爪驱动气缸,爬升驱动气缸的输出端通过鱼眼轴承与复合滑车连接,所主体支架的上下两端还分别设置有一定滑轮座,每个定滑轮座上安装有两个定滑轮,四个定滑轮上设置有由钢丝绳和减震弹簧组成的闭合绳索结构。本发明简单紧凑