
一种四轮独立驱动电动汽车稳定性控制方法及系统.pdf

韶敏****ab


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四轮独立驱动电动汽车稳定性控制方法及系统.pdf
本发明公开了一种四轮独立驱动电动汽车稳定性控制方法,联合利用相图和安全速度区域判别稳定性,实时准确的判断出当前的汽车运行状态是否稳定。同时本发明提出了一种四轮独立驱动电动汽车稳定性控制系统,是利用最优力矩分配的方法综合控制四轮独立驱动电动汽车的四轮独立驱动系统与四轮独立制动系统,使得四个车轮更为协调的工作,提高了稳定性控制器在四轮独立驱动电动汽车上的准确性和实用性。
一种独立驱动电动汽车轨迹跟踪及稳定性集成控制方法.pdf
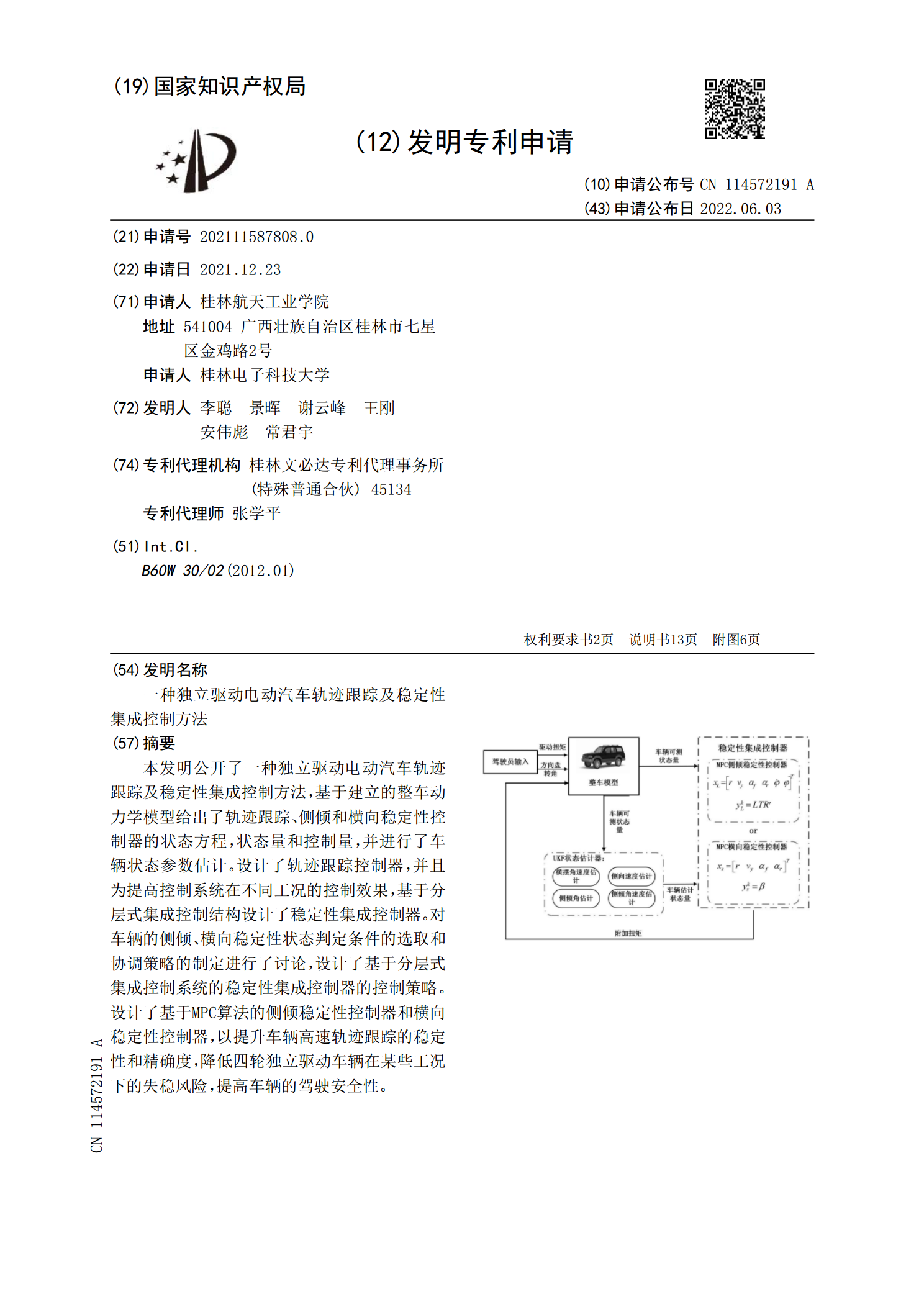
本发明公开了一种独立驱动电动汽车轨迹跟踪及稳定性集成控制方法,基于建立的整车动力学模型给出了轨迹跟踪、侧倾和横向稳定性控制器的状态方程,状态量和控制量,并进行了车辆状态参数估计。设计了轨迹跟踪控制器,并且为提高控制系统在不同工况的控制效果,基于分层式集成控制结构设计了稳定性集成控制器。对车辆的侧倾、横向稳定性状态判定条件的选取和协调策略的制定进行了讨论,设计了基于分层式集成控制系统的稳定性集成控制器的控制策略。设计了基于MPC算法的侧倾稳定性控制器和横向稳定性控制器,以提升车辆高速轨迹跟踪的稳定性和精确度

一种后轮为独立电机驱动的电动汽车的驱动控制系统.pdf
本发明公开了一种后轮为独立电机驱动的电动汽车的驱动控制系统,包括驱动控制器,其特征在于:左前轮转速传感器、右前轮转速传感器、左后轮转速传感器、右后轮转速传感器、左驱动电机的霍尔位置传感器、右驱动电机的霍尔位置传感器、加速踏板位置传感器、方向盘转角传感器和制动传感器电信号的各个输出端分别与驱动控制器的相应信号输入端相连接,左后轮驱动电机和右后轮驱动电机的电源线与控制器的相应输出接口相连,所述驱动控制器还具有与外界通讯的CAN接口。本发明的驱动控制系统,适用于前轮为转向轮,后轮为独立电机驱动的电动汽车的驱动控
一种基于四轮独立驱动电动汽车的转向稳定性方法.pdf
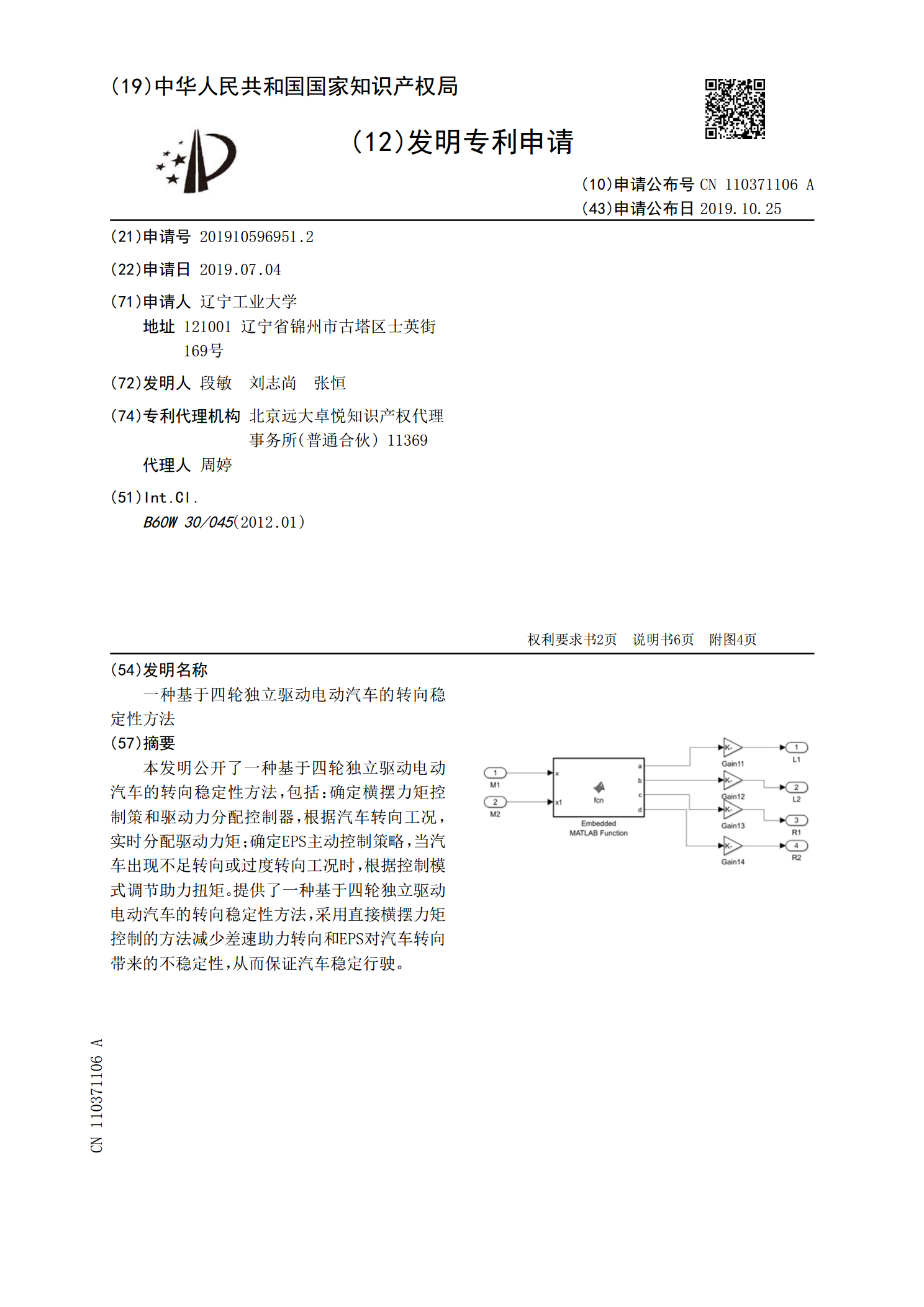
本发明公开了一种基于四轮独立驱动电动汽车的转向稳定性方法,包括:确定横摆力矩控制策和驱动力分配控制器,根据汽车转向工况,实时分配驱动力矩;确定EPS主动控制策略,当汽车出现不足转向或过度转向工况时,根据控制模式调节助力扭矩。提供了一种基于四轮独立驱动电动汽车的转向稳定性方法,采用直接横摆力矩控制的方法减少差速助力转向和EPS对汽车转向带来的不稳定性,从而保证汽车稳定行驶。
基于Q‑学习的四轮独立驱动电动汽车稳定性控制方法.pdf
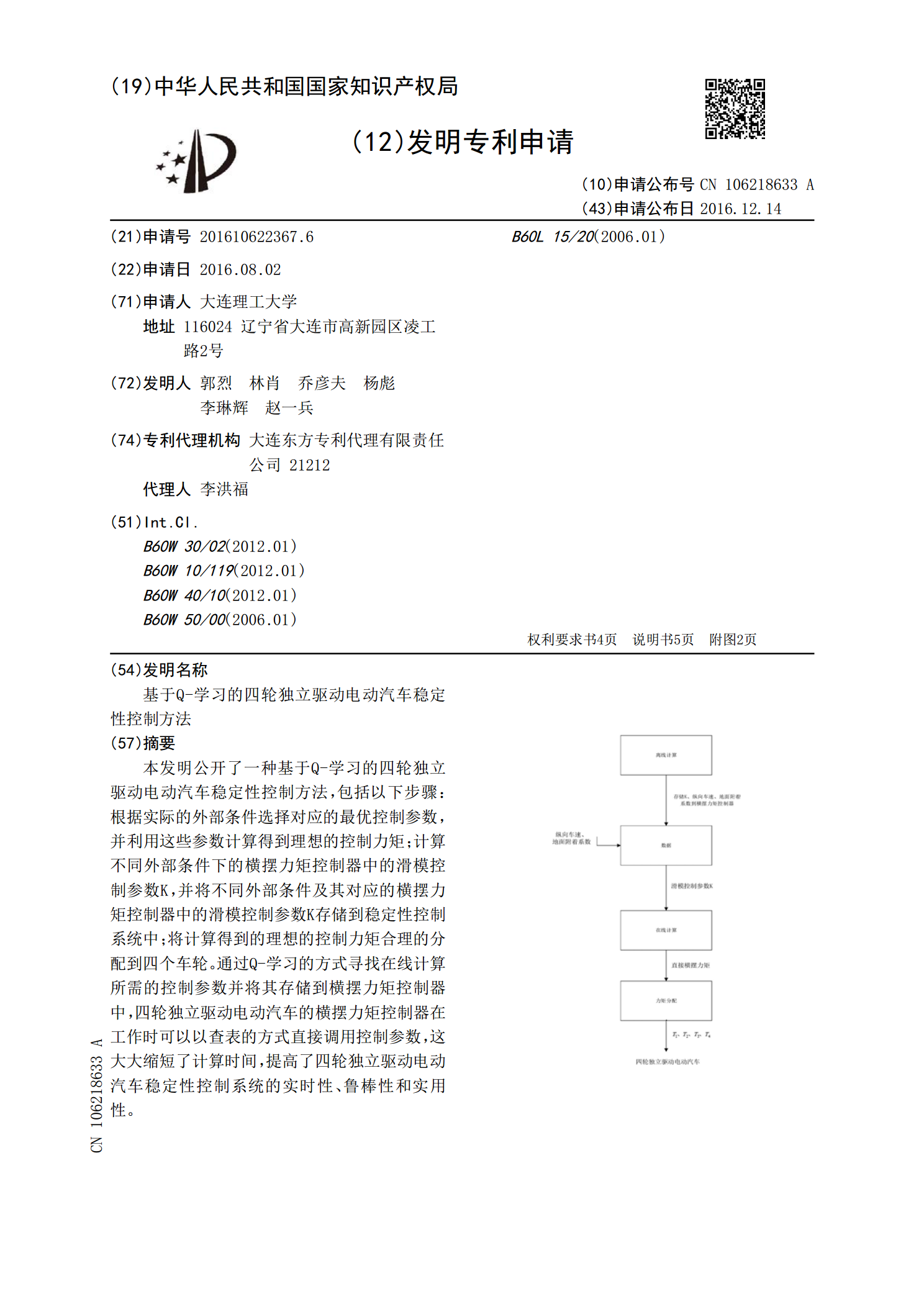
本发明公开了一种基于Q‑学习的四轮独立驱动电动汽车稳定性控制方法,包括以下步骤:根据实际的外部条件选择对应的最优控制参数,并利用这些参数计算得到理想的控制力矩;计算不同外部条件下的横摆力矩控制器中的滑模控制参数K,并将不同外部条件及其对应的横摆力矩控制器中的滑模控制参数K存储到稳定性控制系统中;将计算得到的理想的控制力矩合理的分配到四个车轮。通过Q‑学习的方式寻找在线计算所需的控制参数并将其存储到横摆力矩控制器中,四轮独立驱动电动汽车的横摆力矩控制器在工作时可以以查表的方式直接调用控制参数,这大大缩短了计