
一种基于光流的运动目标跟踪方法.pdf

是你****岺呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于光流的运动目标跟踪方法.pdf
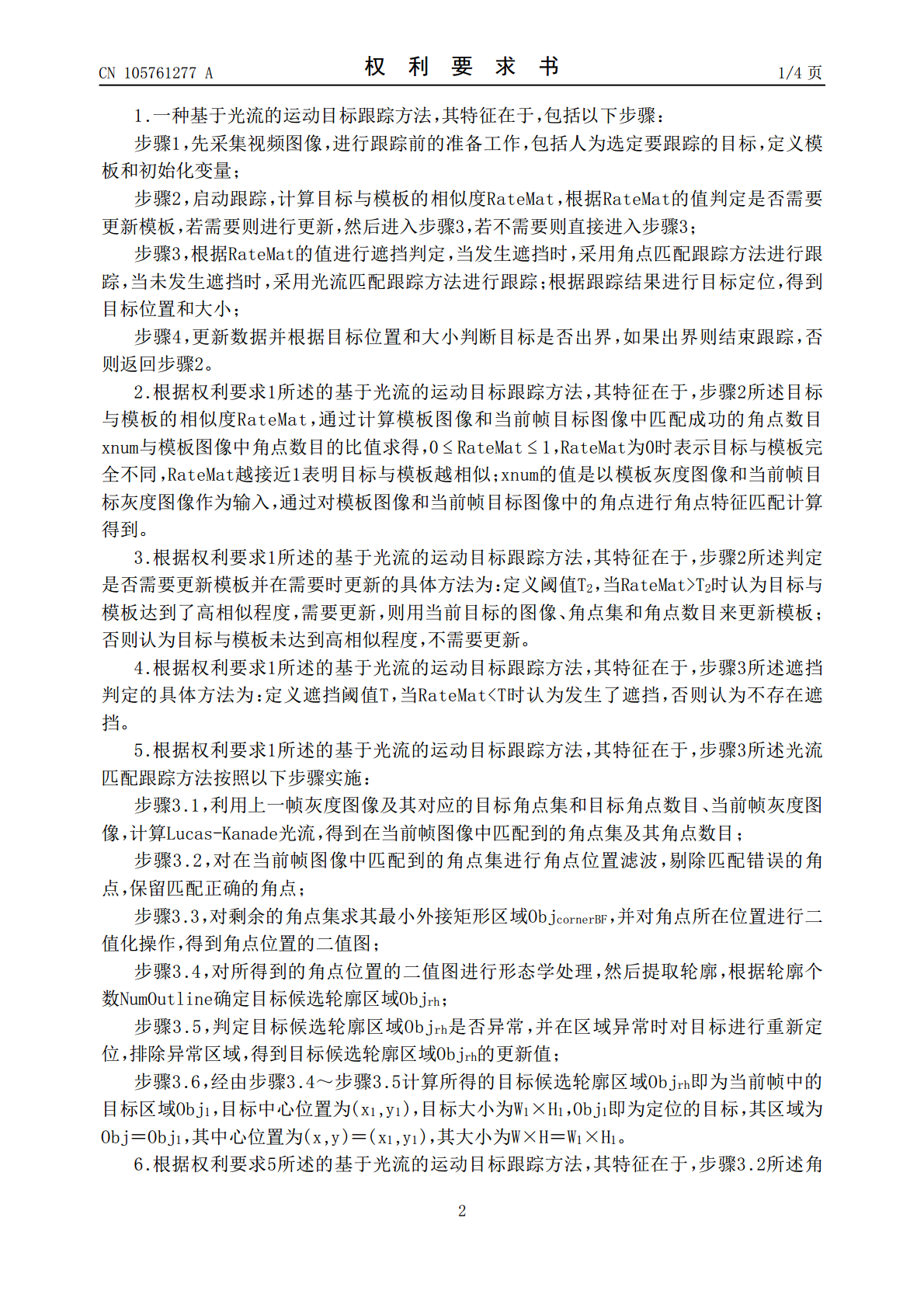
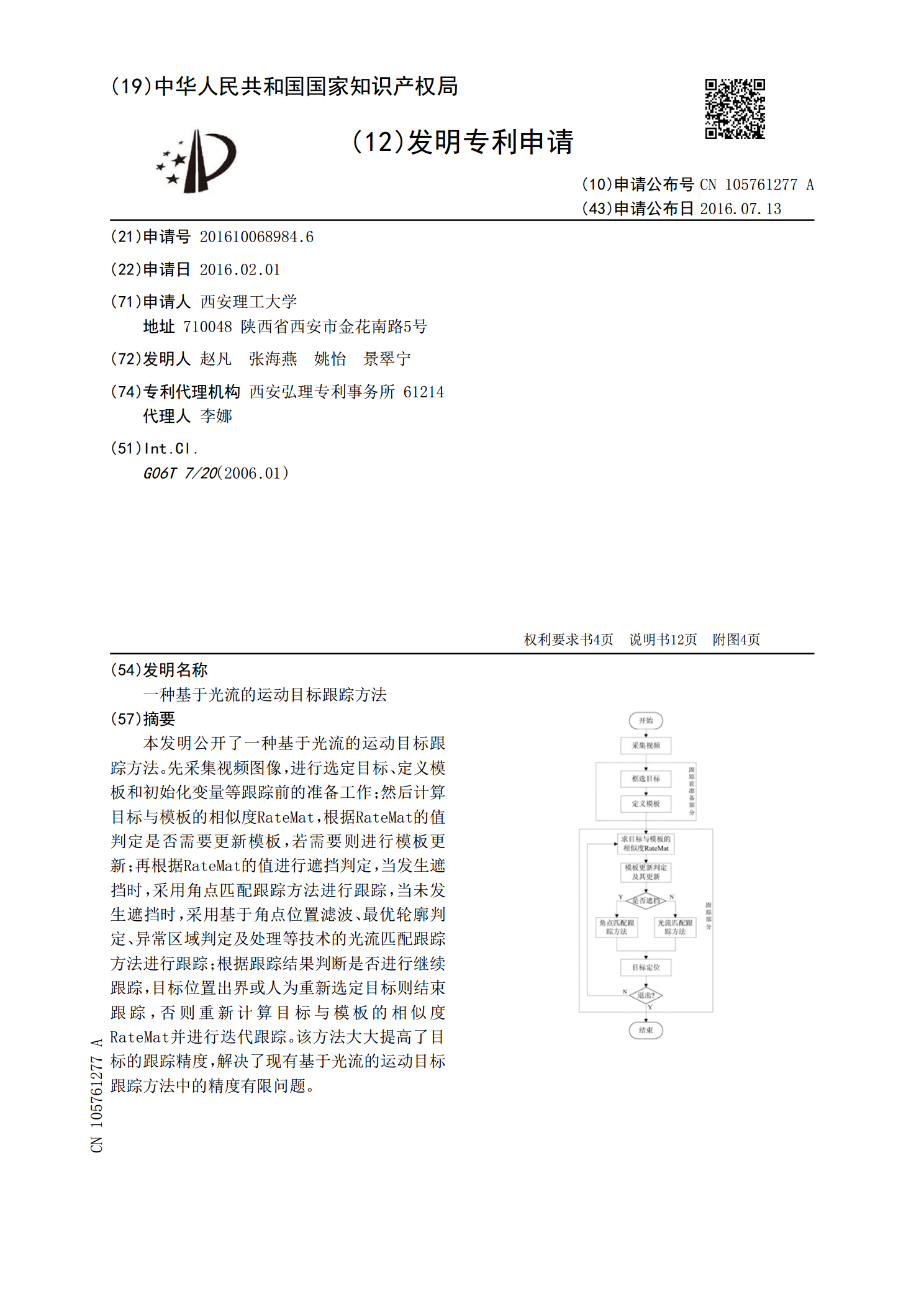
本发明公开了一种基于光流的运动目标跟踪方法。先采集视频图像,进行选定目标、定义模板和初始化变量等跟踪前的准备工作;然后计算目标与模板的相似度RateMat,根据RateMat的值判定是否需要更新模板,若需要则进行模板更新;再根据RateMat的值进行遮挡判定,当发生遮挡时,采用角点匹配跟踪方法进行跟踪,当未发生遮挡时,采用基于角点位置滤波、最优轮廓判定、异常区域判定及处理等技术的光流匹配跟踪方法进行跟踪;根据跟踪结果判断是否进行继续跟踪,目标位置出界或人为重新选定目标则结束跟踪,否则重新计算目标与模板的相
一种基于深度光流的目标跟踪方法.pdf
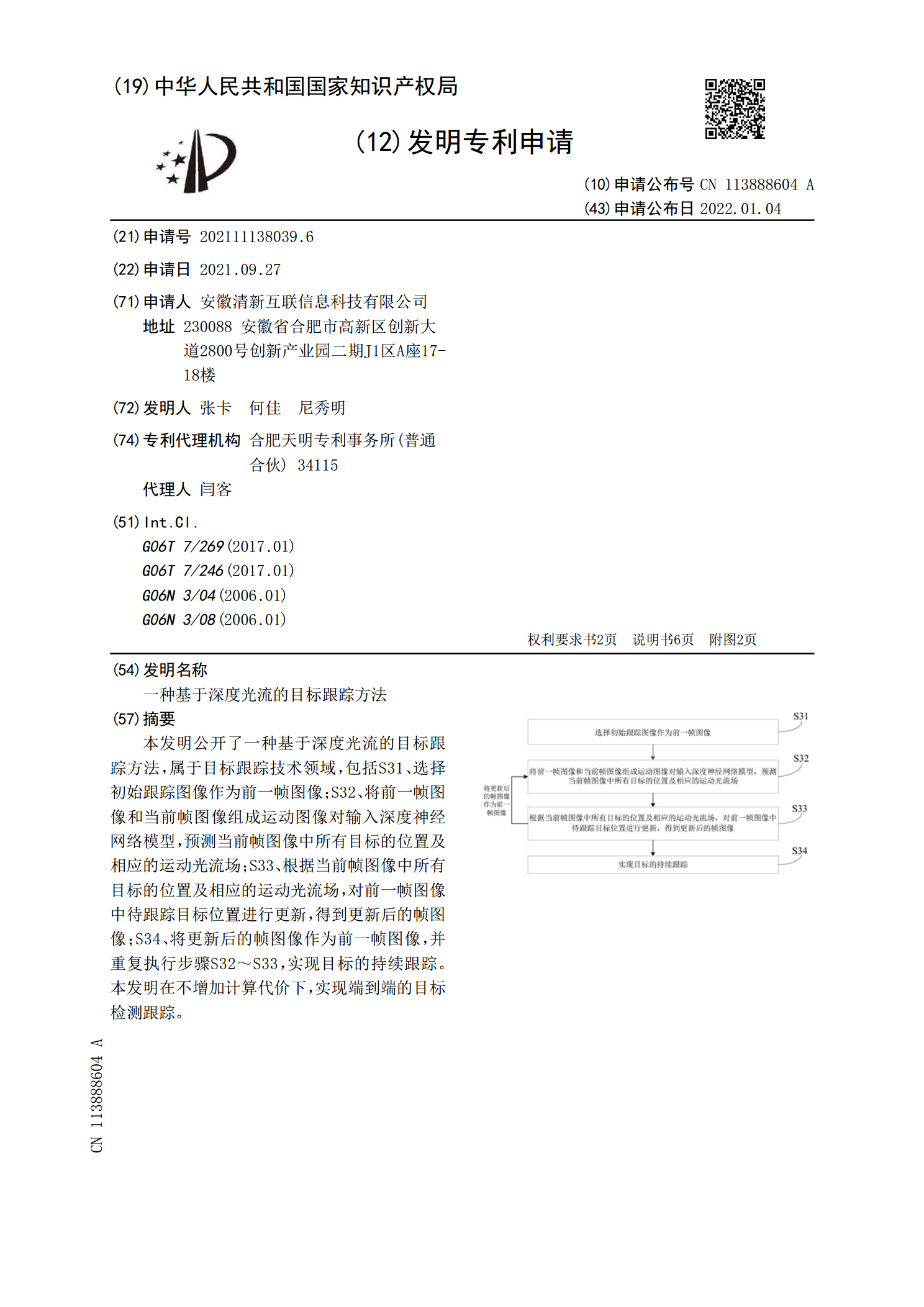
本发明公开了一种基于深度光流的目标跟踪方法,属于目标跟踪技术领域,包括S31、选择初始跟踪图像作为前一帧图像;S32、将前一帧图像和当前帧图像组成运动图像对输入深度神经网络模型,预测当前帧图像中所有目标的位置及相应的运动光流场;S33、根据当前帧图像中所有目标的位置及相应的运动光流场,对前一帧图像中待跟踪目标位置进行更新,得到更新后的帧图像;S34、将更新后的帧图像作为前一帧图像,并重复执行步骤S32~S33,实现目标的持续跟踪。本发明在不增加计算代价下,实现端到端的目标检测跟踪。
一种基于光流跟踪的野外伪装军事目标识别方法.pdf
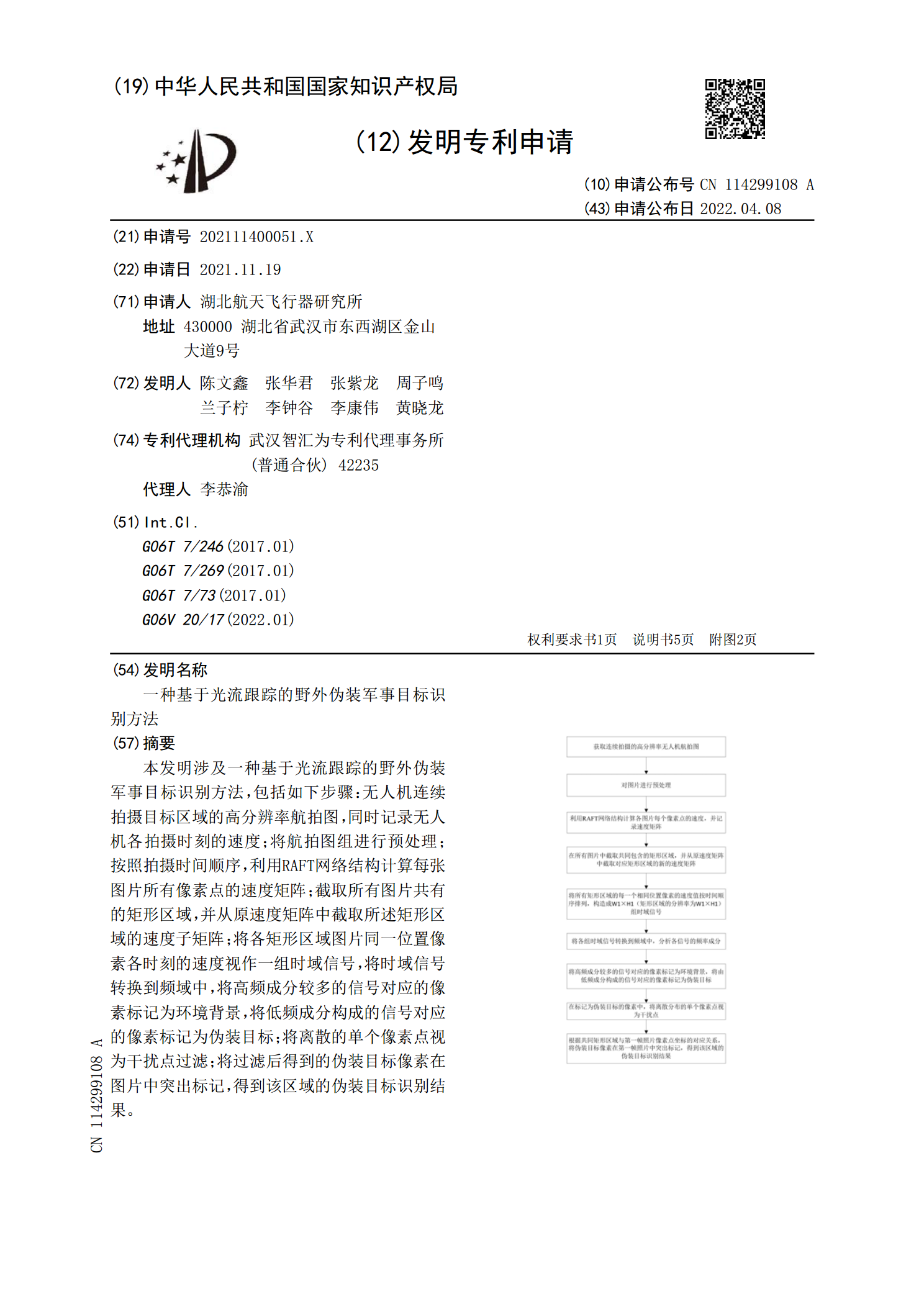
本发明涉及一种基于光流跟踪的野外伪装军事目标识别方法,包括如下步骤:无人机连续拍摄目标区域的高分辨率航拍图,同时记录无人机各拍摄时刻的速度;将航拍图组进行预处理;按照拍摄时间顺序,利用RAFT网络结构计算每张图片所有像素点的速度矩阵;截取所有图片共有的矩形区域,并从原速度矩阵中截取所述矩形区域的速度子矩阵;将各矩形区域图片同一位置像素各时刻的速度视作一组时域信号,将时域信号转换到频域中,将高频成分较多的信号对应的像素标记为环境背景,将低频成分构成的信号对应的像素标记为伪装目标;将离散的单个像素点视为干扰点
一种基于超像素光流场的水平集轮廓跟踪方法.pdf
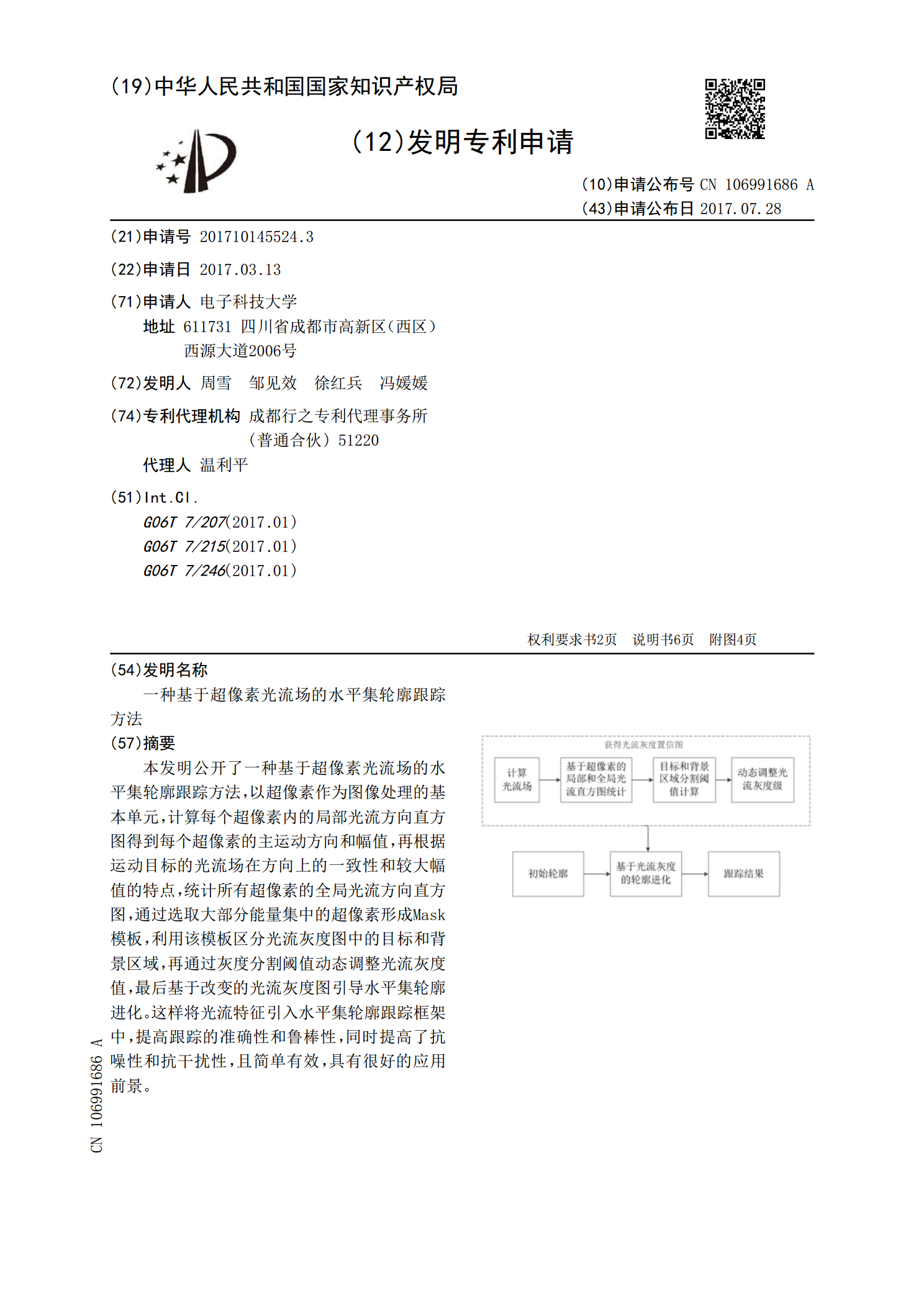
本发明公开了一种基于超像素光流场的水平集轮廓跟踪方法,以超像素作为图像处理的基本单元,计算每个超像素内的局部光流方向直方图得到每个超像素的主运动方向和幅值,再根据运动目标的光流场在方向上的一致性和较大幅值的特点,统计所有超像素的全局光流方向直方图,通过选取大部分能量集中的超像素形成Mask模板,利用该模板区分光流灰度图中的目标和背景区域,再通过灰度分割阈值动态调整光流灰度值,最后基于改变的光流灰度图引导水平集轮廓进化。这样将光流特征引入水平集轮廓跟踪框架中,提高跟踪的准确性和鲁棒性,同时提高了抗噪性和抗干

基于光流机制的运动目标检测的开题报告.docx
基于光流机制的运动目标检测的开题报告一、研究背景随着计算机视觉技术的不断发展,运动目标检测已经成为一个热门的研究领域。通常情况下,运动目标检测是指从视频流或者序列图像中检测出物体运动的位置和方向,是许多智能系统中的核心问题之一。传统的运动目标检测方法主要基于目标物体的外形和背景差异的变化,但是在复杂的背景环境下,这种方法容易出现局限性,导致检测效果不佳。最近,一些新的方法基于光流机制,通过分析连续帧之间的像素级运动信息,来更准确地检测目标物体。这种方法具有自适应性、对背景光照变化的适应能力强、对复杂运动甚