
一种基于深度光流的目标跟踪方法.pdf

篷璐****爱吗


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度光流的目标跟踪方法.pdf
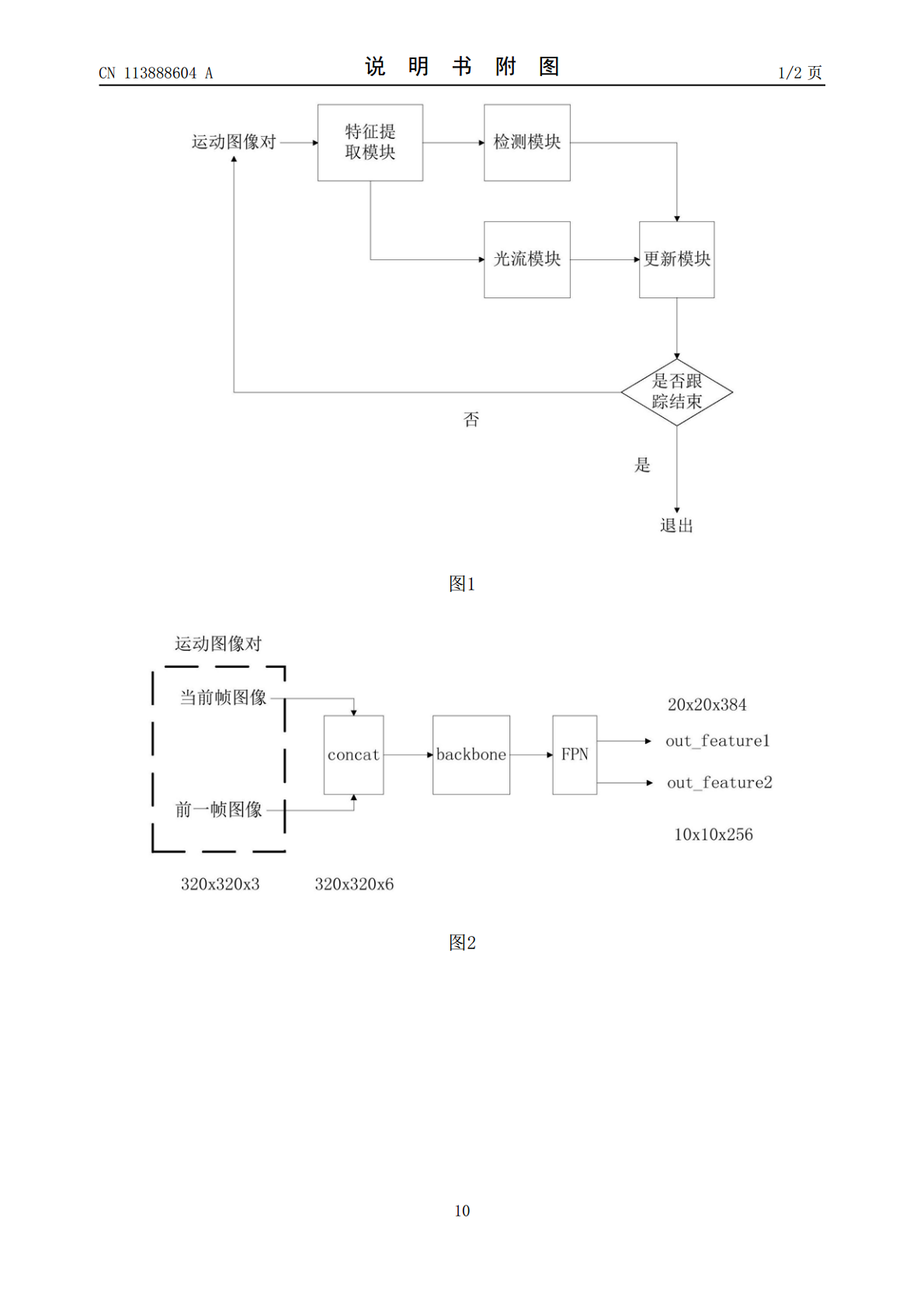
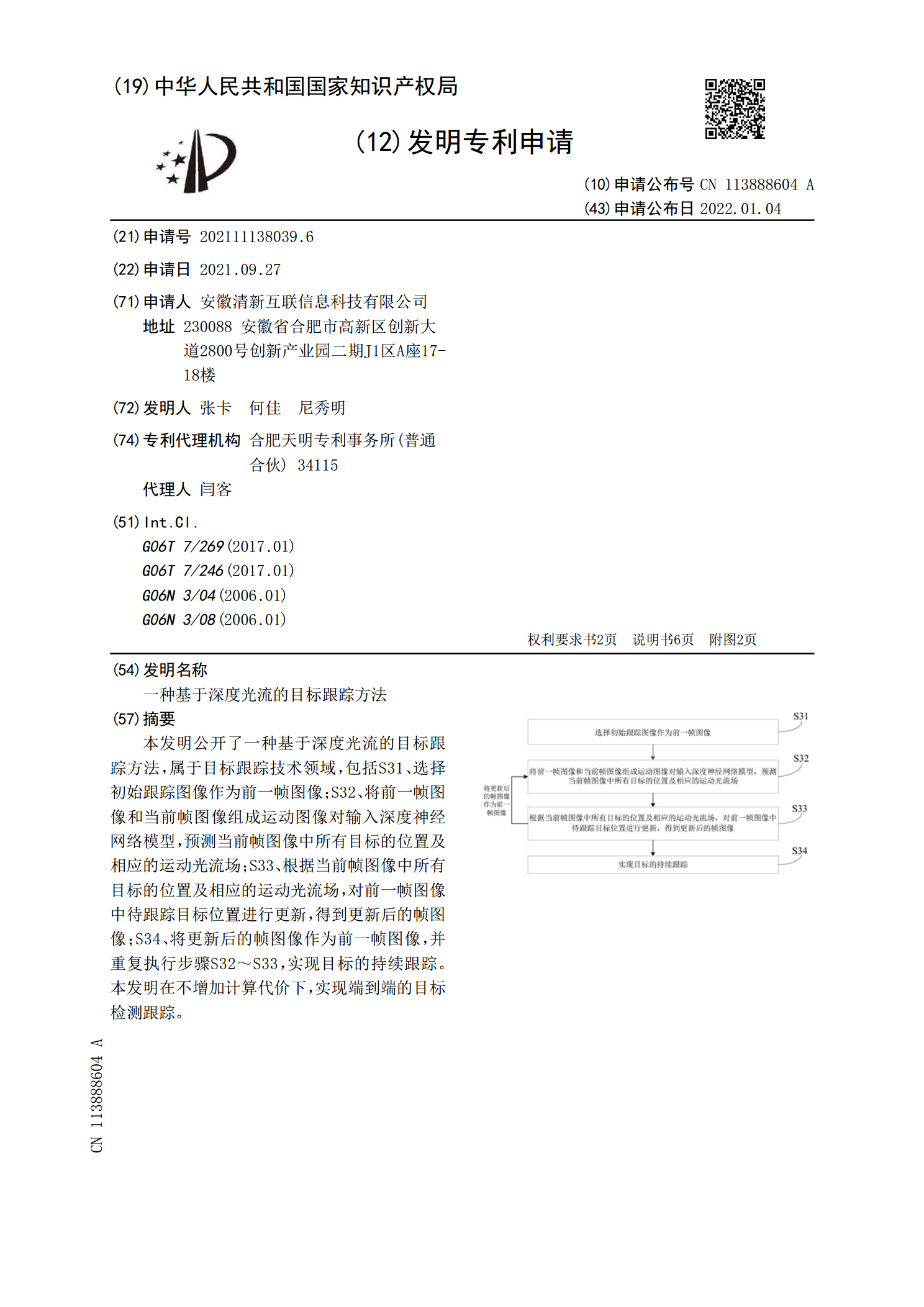
本发明公开了一种基于深度光流的目标跟踪方法,属于目标跟踪技术领域,包括S31、选择初始跟踪图像作为前一帧图像;S32、将前一帧图像和当前帧图像组成运动图像对输入深度神经网络模型,预测当前帧图像中所有目标的位置及相应的运动光流场;S33、根据当前帧图像中所有目标的位置及相应的运动光流场,对前一帧图像中待跟踪目标位置进行更新,得到更新后的帧图像;S34、将更新后的帧图像作为前一帧图像,并重复执行步骤S32~S33,实现目标的持续跟踪。本发明在不增加计算代价下,实现端到端的目标检测跟踪。
一种基于光流的运动目标跟踪方法.pdf
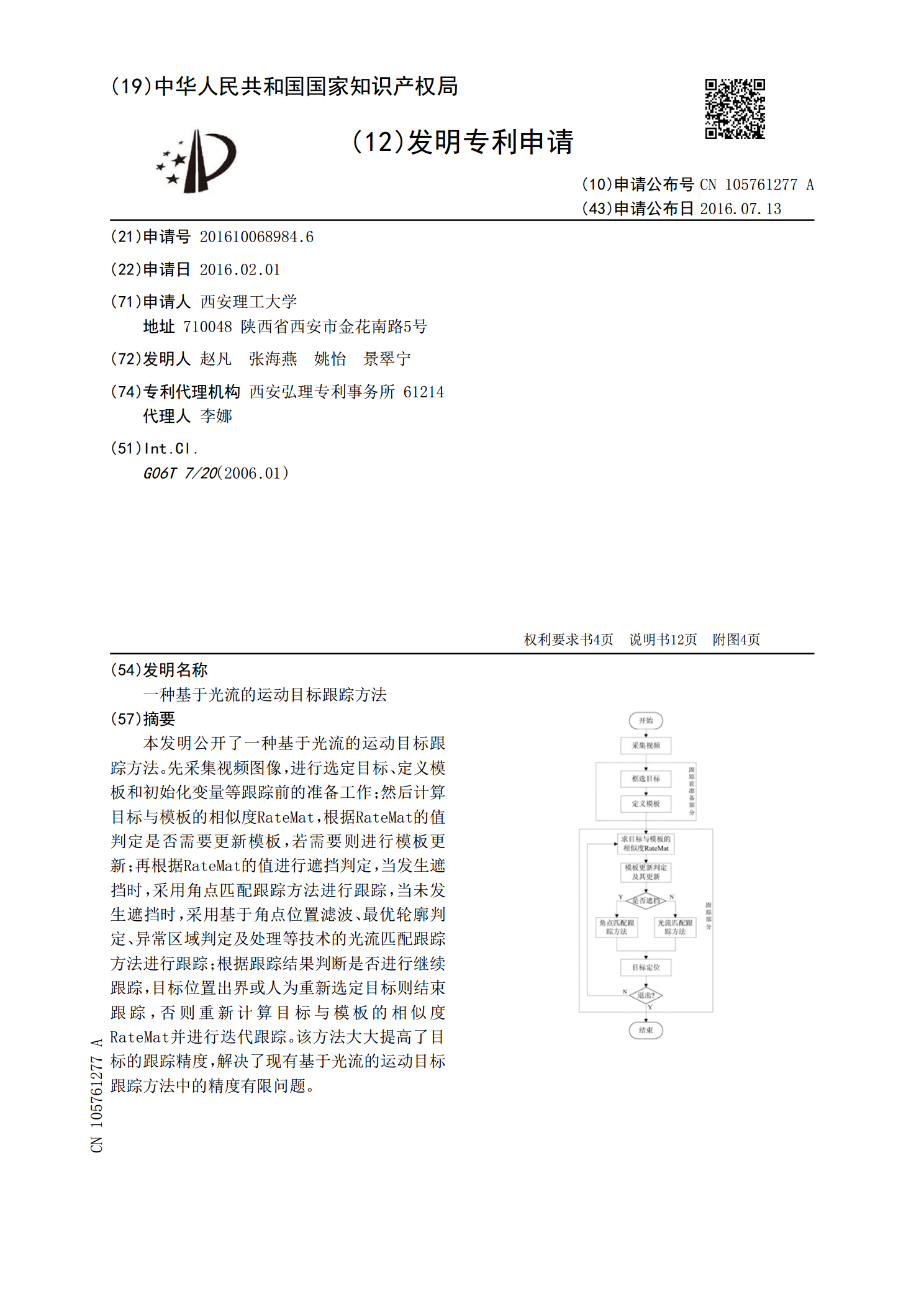
本发明公开了一种基于光流的运动目标跟踪方法。先采集视频图像,进行选定目标、定义模板和初始化变量等跟踪前的准备工作;然后计算目标与模板的相似度RateMat,根据RateMat的值判定是否需要更新模板,若需要则进行模板更新;再根据RateMat的值进行遮挡判定,当发生遮挡时,采用角点匹配跟踪方法进行跟踪,当未发生遮挡时,采用基于角点位置滤波、最优轮廓判定、异常区域判定及处理等技术的光流匹配跟踪方法进行跟踪;根据跟踪结果判断是否进行继续跟踪,目标位置出界或人为重新选定目标则结束跟踪,否则重新计算目标与模板的相

一种基于光流与图像分割的深度表示方法.pdf
本发明公开了一种基于光流与图像分割的深度表示方法,包括如下步骤:(1)对原始二维视频中的每一帧图像,参考其在时间方向上相邻的后一帧图像,进行光流分析,得到当前图像的光流图;(2)对原始二维视频中的每一帧图像进行图像分割,得到分割图;(3)结合原始二维视频中每一帧图像对应的光流图与分割图,得到深度图,用于三维视频的表达。本发明利用光流分析的方法提取二维视频中的运动信息,与窗口匹配的方法相比更精确;同时结合图像分割的方法,产生用于三维视频表达的深度图,有效地平滑了噪声,修饰了物体边缘轮廓。
一种基于光流跟踪的野外伪装军事目标识别方法.pdf
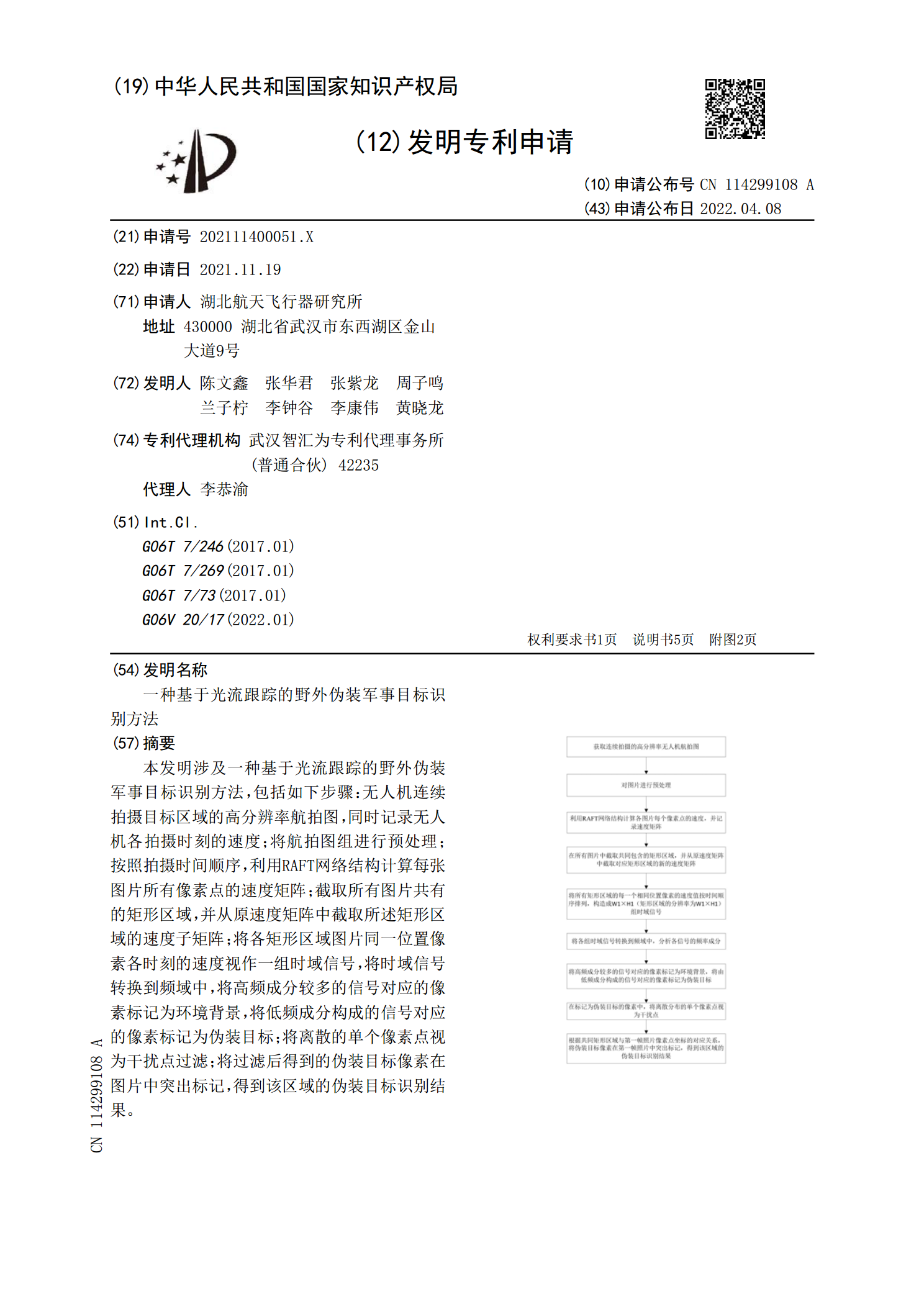
本发明涉及一种基于光流跟踪的野外伪装军事目标识别方法,包括如下步骤:无人机连续拍摄目标区域的高分辨率航拍图,同时记录无人机各拍摄时刻的速度;将航拍图组进行预处理;按照拍摄时间顺序,利用RAFT网络结构计算每张图片所有像素点的速度矩阵;截取所有图片共有的矩形区域,并从原速度矩阵中截取所述矩形区域的速度子矩阵;将各矩形区域图片同一位置像素各时刻的速度视作一组时域信号,将时域信号转换到频域中,将高频成分较多的信号对应的像素标记为环境背景,将低频成分构成的信号对应的像素标记为伪装目标;将离散的单个像素点视为干扰点

一种基于深度信息的多目标跟踪方法.pdf
本发明提供一种基于深度信息的多目标跟踪方法,包括步骤:A.连续获取场景区域的深度帧;B.判断当前深度帧中是否出现启动动作,是则进入步骤C,否则进入步骤D;C.获取产生该启动动作的目标的特征信息并加入特征信息数据库;D.检查特征信息数据库中是否存在已经记录的特征信息,有则进入步骤E,否则返回步骤A;E.读取特征信息数据库中的特征信息,以其中深度位置信息为参数,在当前深度帧中提取参考轮廓;F.计算出所有参考轮廓的特征信息集合;G.将特征信息数据库中记录的特征信息与参考轮廓的特征信息集合进行对比,发现满足匹配条