
一种智能播种机.pdf

灵波****ng

1/7
2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能播种机.pdf
本发明涉及农作物种植辅助装置的技术领域,特别是涉及一种智能播种机;不需要在播种前后对播种区域进行处理,工作效率较高;并且可有效处理部分农作物种子外部包裹的土层,播种的效果较好,实用性较高;同时其可有效调节播种种子之间的间距,提高农作物的生长情况,从而提高其使用可靠性;包括播种盒、连通管、底板、连接杆、推杆、四组支腿和四组滚轮,播种盒内设置有放置腔,播种盒的顶端设置有取放口,取放口与放置腔相通;还包括两组螺纹杆、两组螺纹管、两组连接板、开土板和覆土板,开土板和覆土板分别安装在两组连接板的底端;播种盒的上方设
一种智能播种机.pdf
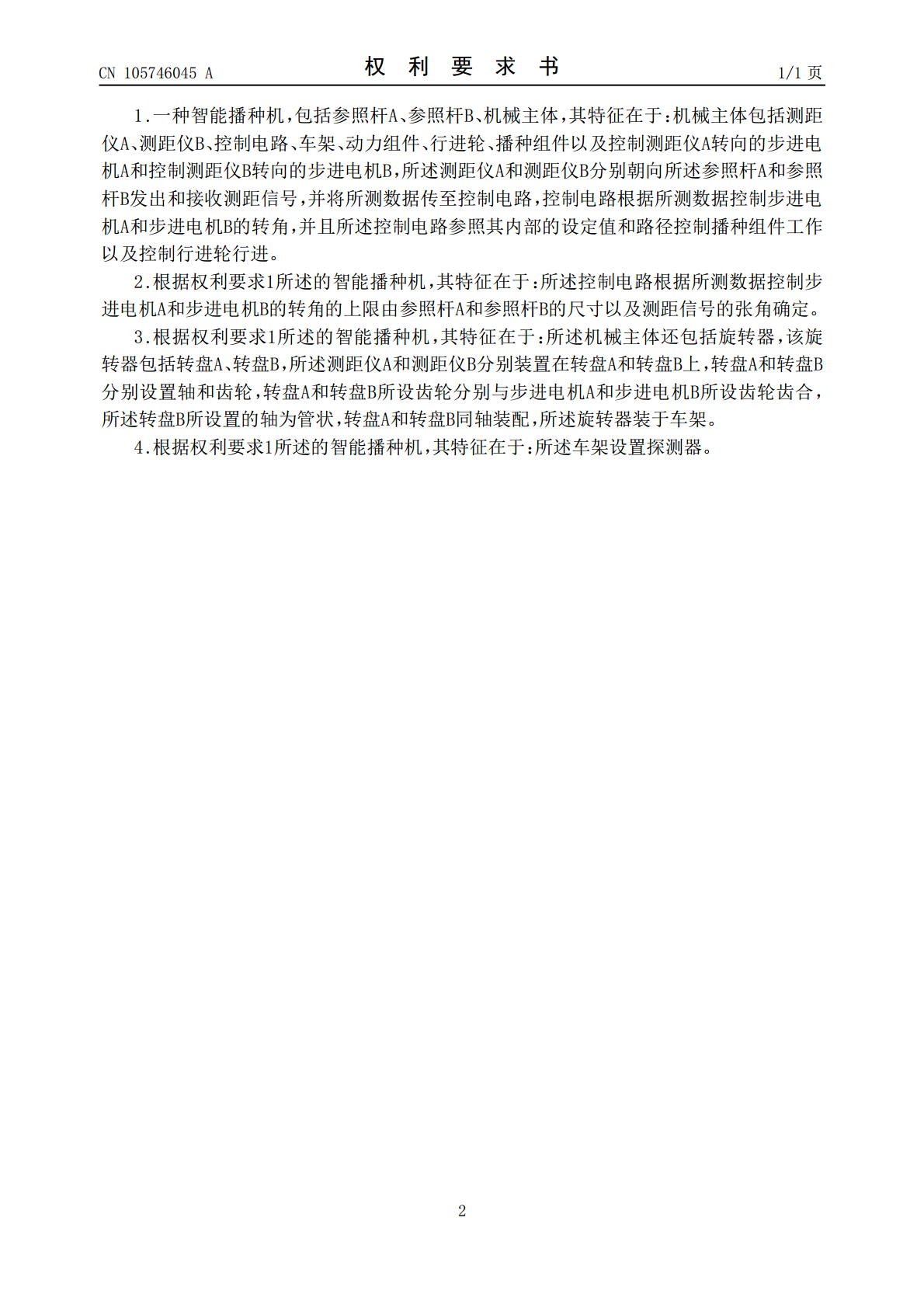
一种智能播种机,包括参照杆A、参照杆B、机械主体,机械主体包括测距仪A、测距仪B、控制电路、车架、动力组件、行进轮、播种组件以及控制测距仪A转向的步进电机A和控制测距仪B转向的步进电机B,所述测距仪A和测距仪B分别朝向所述参照杆A和参照杆B发出和接收测距信号,并将所测数据传至控制电路,控制电路根据所测数据控制步进电机A和步进电机B的转角,并且所述控制电路参照其内部的设定值和路径控制播种组件工作以及控制行进轮行进。

一种智能农业播种机.pdf
本发明涉及一种智能农业播种机,包括本体,本体包括U型架体、放置板、种箱和动能箱,U型架体包括平板和固定连接于其前、后两端的竖板,放置板固定连接于平板右侧壁中间位置,种箱固定连接于平板顶壁上,动能箱固定连接于平板底壁中间位置,竖板下端中间位置设有与其固定连接的条形延伸板;功能部,功能部包括供能组件、第一驱动组件、第二驱动组件和连杆组件,供能组件包括电机、转轴和主动盘,电机固定连接于放置板顶壁上,主动盘位于放置板下端,转轴一端与电机固定连接,另一端穿透放置板与主动盘键连接,第一驱动组件与主动盘活动连接,第二驱
一种智能农业播种机.pdf
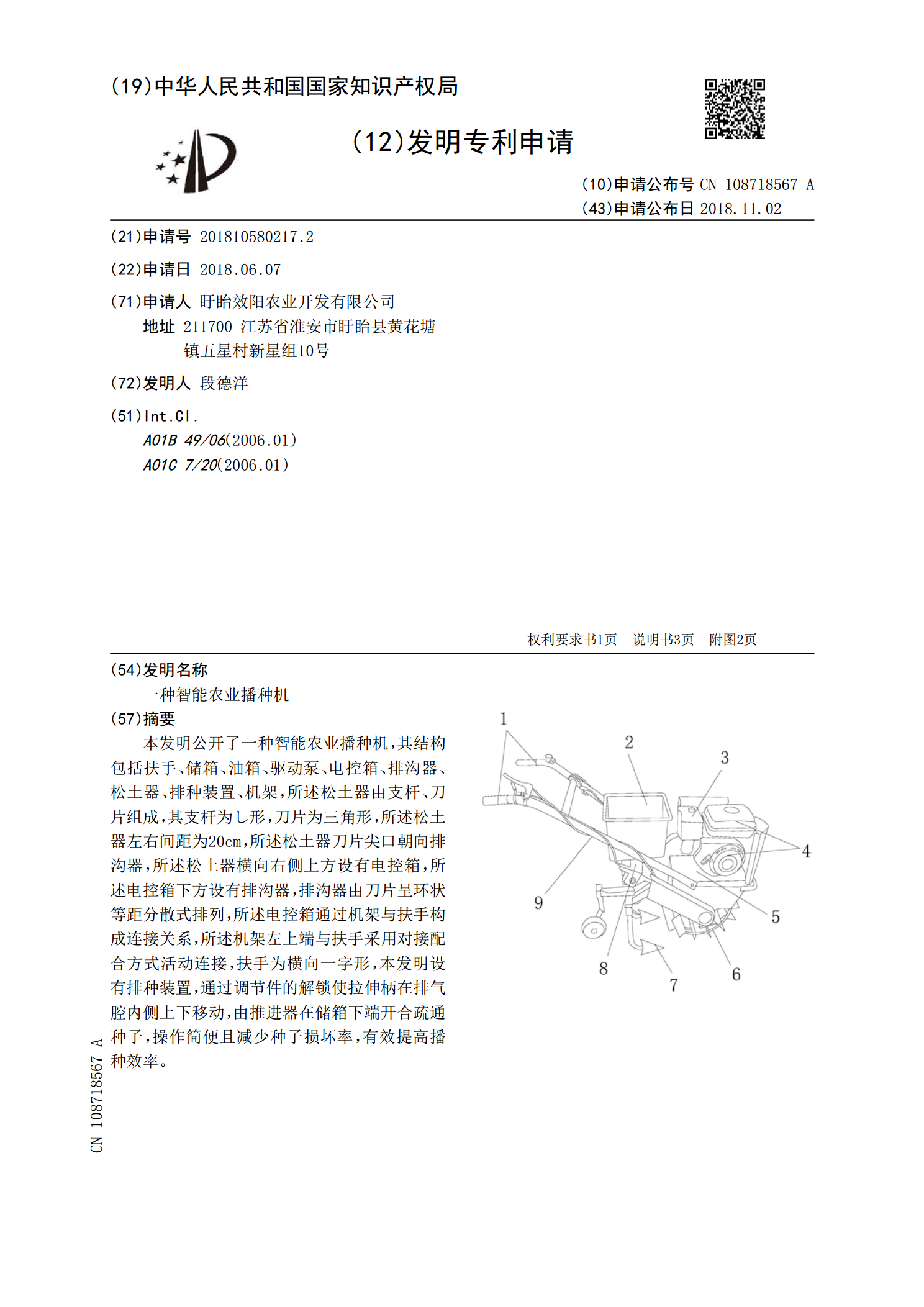
本发明公开了一种智能农业播种机,其结构包括扶手、储箱、油箱、驱动泵、电控箱、排沟器、松土器、排种装置、机架,所述松土器由支杆、刀片组成,其支杆为し形,刀片为三角形,所述松土器左右间距为20cm,所述松土器刀片尖口朝向排沟器,所述松土器横向右侧上方设有电控箱,所述电控箱下方设有排沟器,排沟器由刀片呈环状等距分散式排列,所述电控箱通过机架与扶手构成连接关系,所述机架左上端与扶手采用对接配合方式活动连接,扶手为横向一字形,本发明设有排种装置,通过调节件的解锁使拉伸柄在排气腔内侧上下移动,由推进器在储箱下端开合疏
一种智能播种机器人.pdf
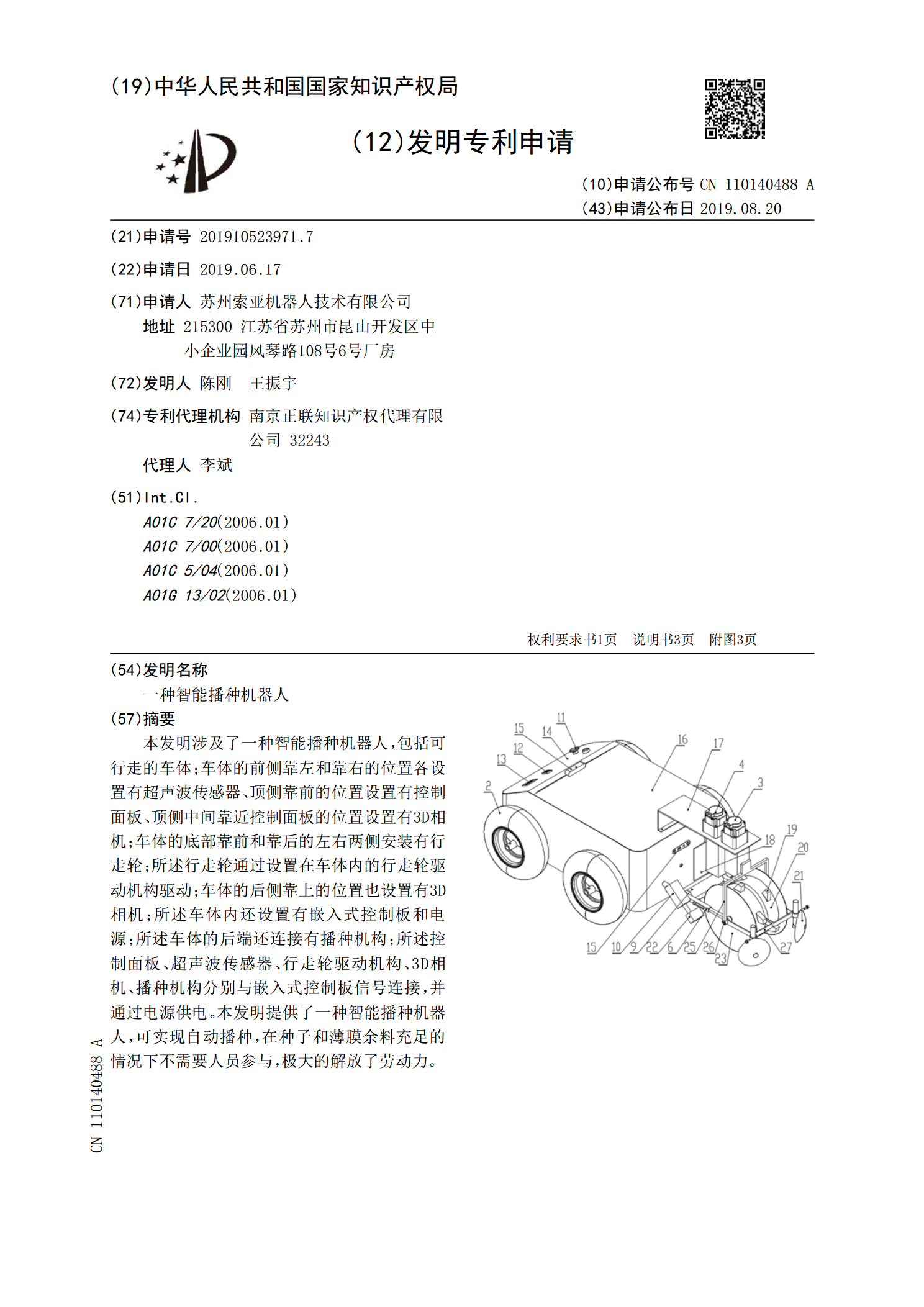
本发明涉及了一种智能播种机器人,包括可行走的车体;车体的前侧靠左和靠右的位置各设置有超声波传感器、顶侧靠前的位置设置有控制面板、顶侧中间靠近控制面板的位置设置有3D相机;车体的底部靠前和靠后的左右两侧安装有行走轮;所述行走轮通过设置在车体内的行走轮驱动机构驱动;车体的后侧靠上的位置也设置有3D相机;所述车体内还设置有嵌入式控制板和电源;所述车体的后端还连接有播种机构;所述控制面板、超声波传感器、行走轮驱动机构、3D相机、播种机构分别与嵌入式控制板信号连接,并通过电源供电。本发明提供了一种智能播种机器人,可