
一种智能播种机器人.pdf

一条****发啊

1/8

2/8

3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能播种机器人.pdf
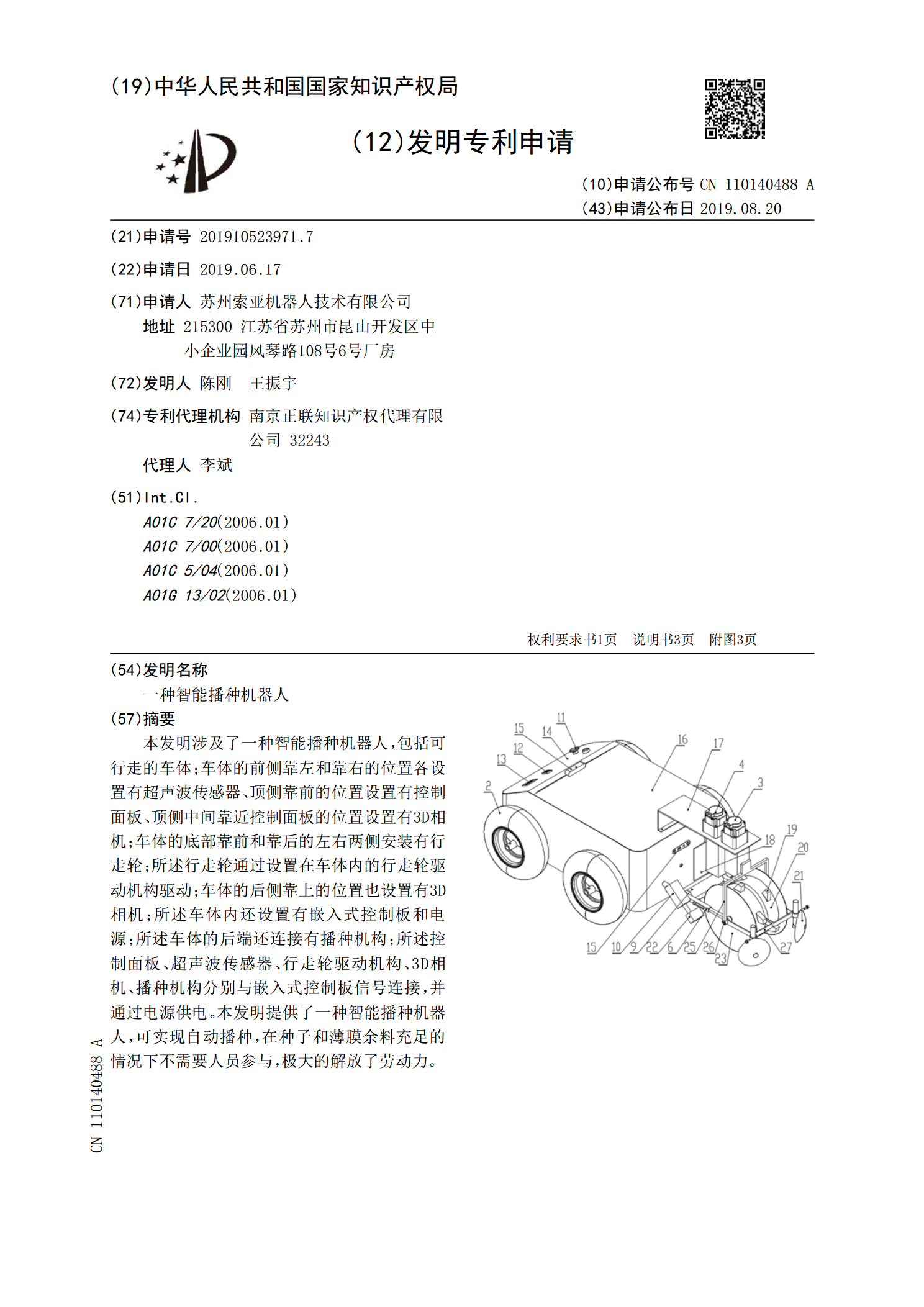
本发明涉及了一种智能播种机器人,包括可行走的车体;车体的前侧靠左和靠右的位置各设置有超声波传感器、顶侧靠前的位置设置有控制面板、顶侧中间靠近控制面板的位置设置有3D相机;车体的底部靠前和靠后的左右两侧安装有行走轮;所述行走轮通过设置在车体内的行走轮驱动机构驱动;车体的后侧靠上的位置也设置有3D相机;所述车体内还设置有嵌入式控制板和电源;所述车体的后端还连接有播种机构;所述控制面板、超声波传感器、行走轮驱动机构、3D相机、播种机构分别与嵌入式控制板信号连接,并通过电源供电。本发明提供了一种智能播种机器人,可

一种农业智能播种机器人装置.pdf
本发明涉及农业机械领域,具体涉及一种农业智能播种机器人装置,包括支撑板,支撑板的下方固定安装支撑腿,支撑板的上方设置驱动机构、控制系统、储种仓,支撑板的下方设置多个下端开口的箱体,箱体上对应支撑腿的下端处均贯穿设置同一根与箱体垂直的转轴,箱体的内部对应转轴处均设置链轮,链轮均套装在转轴上并与之花键连接,转轴通过传动组件与驱动机构相连,驱动机构能够通过传动组件带动转轴旋转,同一个箱体内的链轮的外侧均啮合同一条链条,链条由多个链板首尾铰接连接组成,链板上均安装开孔组件,开孔组件能够在地面上开孔并播种,该设计能

一种便于播种的AI智能农业机器人.pdf
本发明提供一种便于播种的AI智能农业机器人,涉及农业设备技术领域,以解决现有的农业机器人在使用时,风流容易使覆盖的地膜掀翻的问题,包括主体,载板和转杆,所述分料件的侧面通过皮带轮与主体内侧底部的电机相连接,且分料件安装在储料箱的底端;所述推板外部的内板设在内槽的内部;所述滑槽设在主体的内侧底部,且滑槽内部的滑板与伸缩件的侧面相连接;所述固定板设在滑板顶部的侧面;所述载板的外端设有倾斜板,且载板设在主体的侧面;所述转杆的顶部设有凹槽,且转杆顶部的凹槽与伸缩件顶部的伞齿轮相啮合,并且转杆的底端设有开槽。载板对
一种智能装盘播种机播种辊.pdf
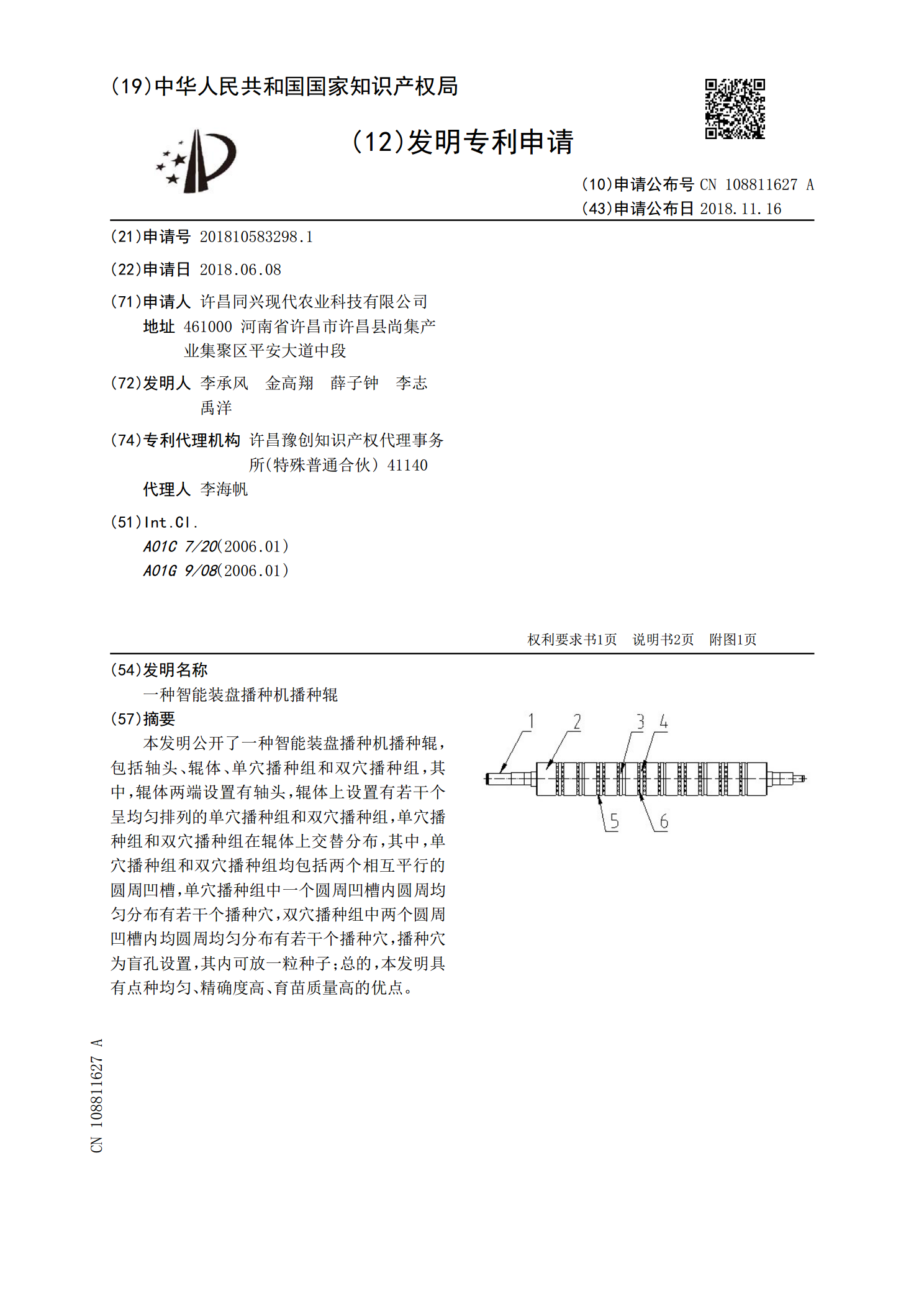
本发明公开了一种智能装盘播种机播种辊,包括轴头、辊体、单穴播种组和双穴播种组,其中,辊体两端设置有轴头,辊体上设置有若干个呈均匀排列的单穴播种组和双穴播种组,单穴播种组和双穴播种组在辊体上交替分布,其中,单穴播种组和双穴播种组均包括两个相互平行的圆周凹槽,单穴播种组中一个圆周凹槽内圆周均匀分布有若干个播种穴,双穴播种组中两个圆周凹槽内均圆周均匀分布有若干个播种穴,播种穴为盲孔设置,其内可放一粒种子;总的,本发明具有点种均匀、精确度高、育苗质量高的优点。

一种丘陵山地播种喷药一体化智能机器人.pdf
本发明涉及一种丘陵山地播种喷药一体化智能机器人,属于智能农业机械技术领域。所述的丘陵山地播种喷药一体化智能机器人包括履带行走装置、摄像头、可调节式喷药装置、升降机构、仿形式机械播种机构、遥控装置、直线电动推杆;所述的履带行走装置上设置有可调节式喷药装置和升降机构,升降机构末端连接有仿形式机械播种机构,履带行走装置前侧安装有摄像头,升降机构通过直线电动推杆推动升降。本发明采用远程遥控式履带车平台,实现农业机械的智能化,在三七种植中对三七进行播种、喷药、运输等作业,只需通过遥控装置和监控器就可坐着把活干完,大