
多连杆驱动装置及运输车.pdf

努力****元恺

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多连杆驱动装置及运输车.pdf
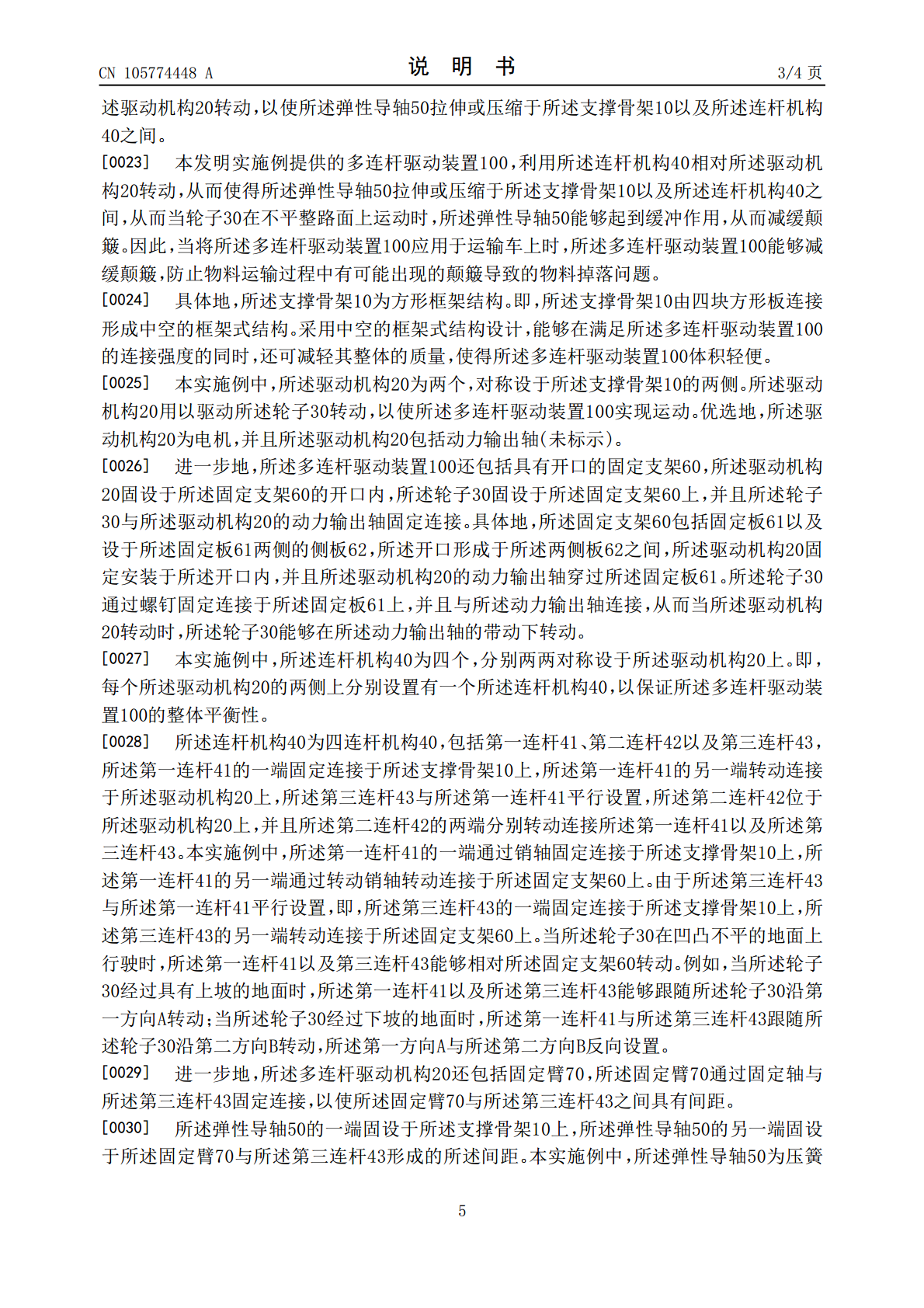
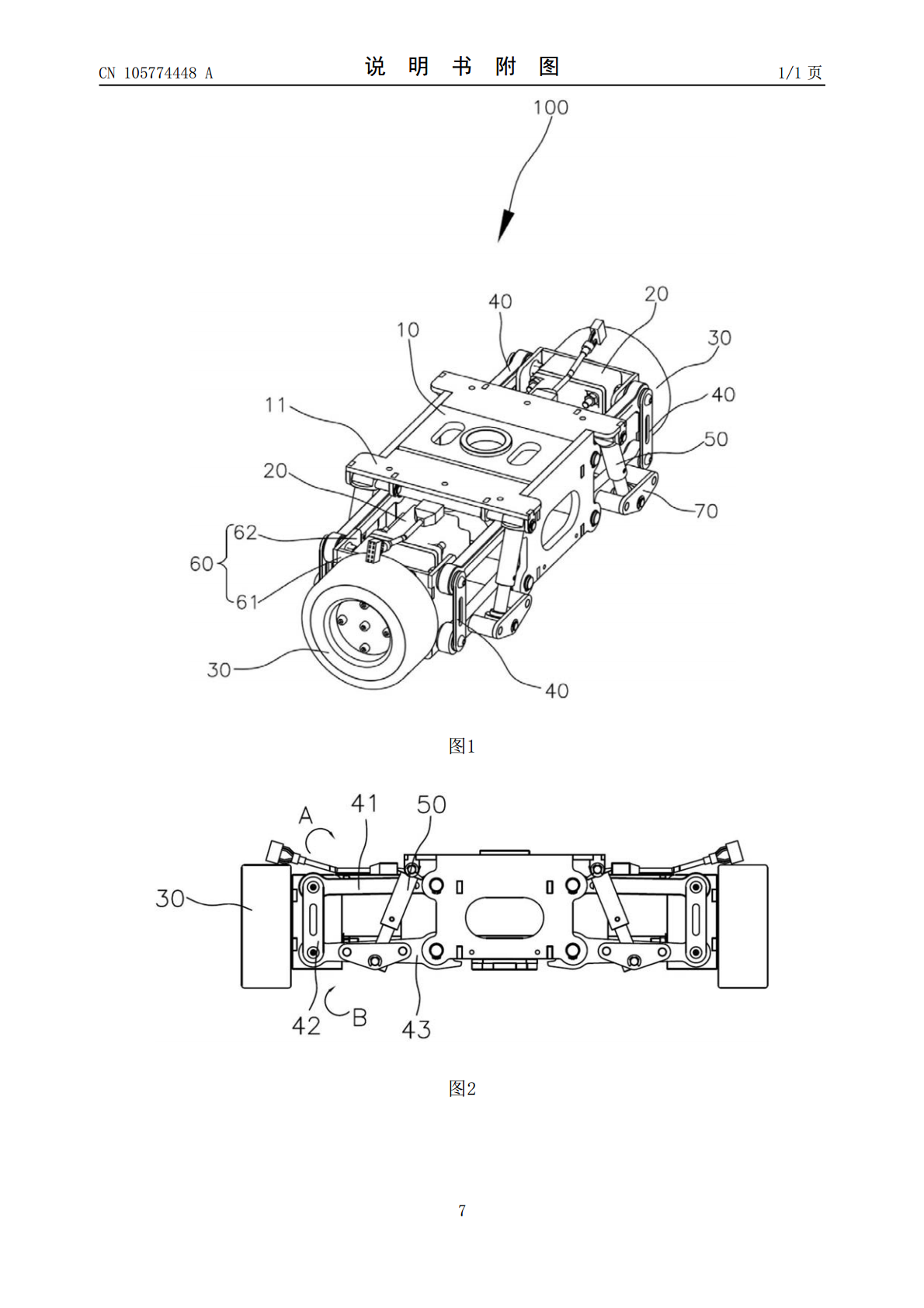
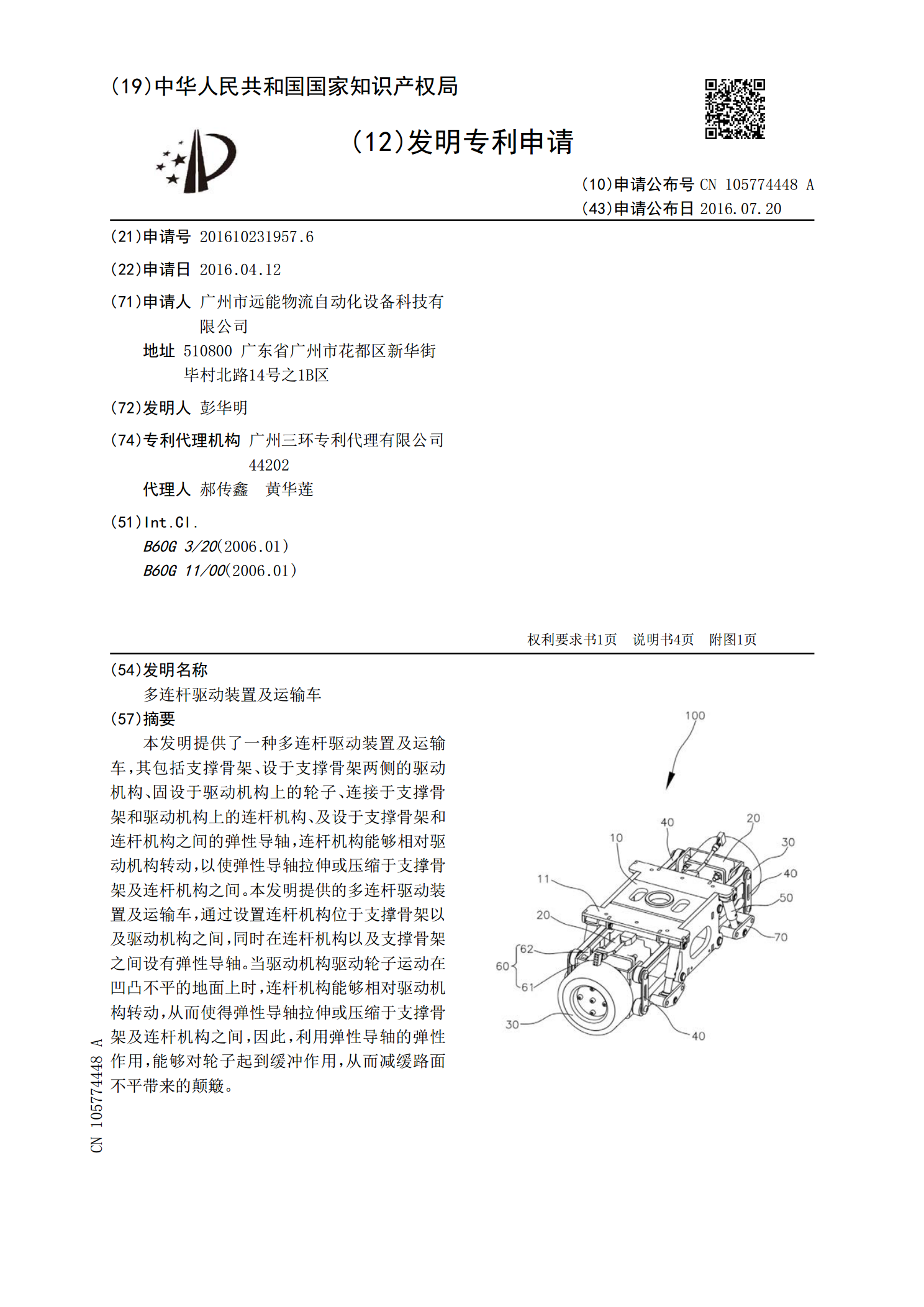
本发明提供了一种多连杆驱动装置及运输车,其包括支撑骨架、设于支撑骨架两侧的驱动机构、固设于驱动机构上的轮子、连接于支撑骨架和驱动机构上的连杆机构、及设于支撑骨架和连杆机构之间的弹性导轴,连杆机构能够相对驱动机构转动,以使弹性导轴拉伸或压缩于支撑骨架及连杆机构之间。本发明提供的多连杆驱动装置及运输车,通过设置连杆机构位于支撑骨架以及驱动机构之间,同时在连杆机构以及支撑骨架之间设有弹性导轴。当驱动机构驱动轮子运动在凹凸不平的地面上时,连杆机构能够相对驱动机构转动,从而使得弹性导轴拉伸或压缩于支撑骨架及连杆机构

行星-连杆驱动装置.pdf
本发明公开了一种行星-连杆驱动装置,它包括:齿轮a、齿轮b、太阳轮、行星轮、齿轮c、装置配重块、行星轮配重块、连杆及辊箱;所述齿轮a与电机连接;齿轮b与齿轮a相啮合;齿轮b与太阳轮同轴;行星轮的中心固定在太阳轮上,行星轮与齿轮c相啮合;连杆一端固定在行星轮上,另一端与移动的辊箱连接;装置配重块固定在太阳轮上,行星轮配重块固定在行星轮上。通过本发明所述的行星-连杆驱动装置,降低了冷轧管机的控制难度,提高了轧制频率,并且运行平稳可靠。
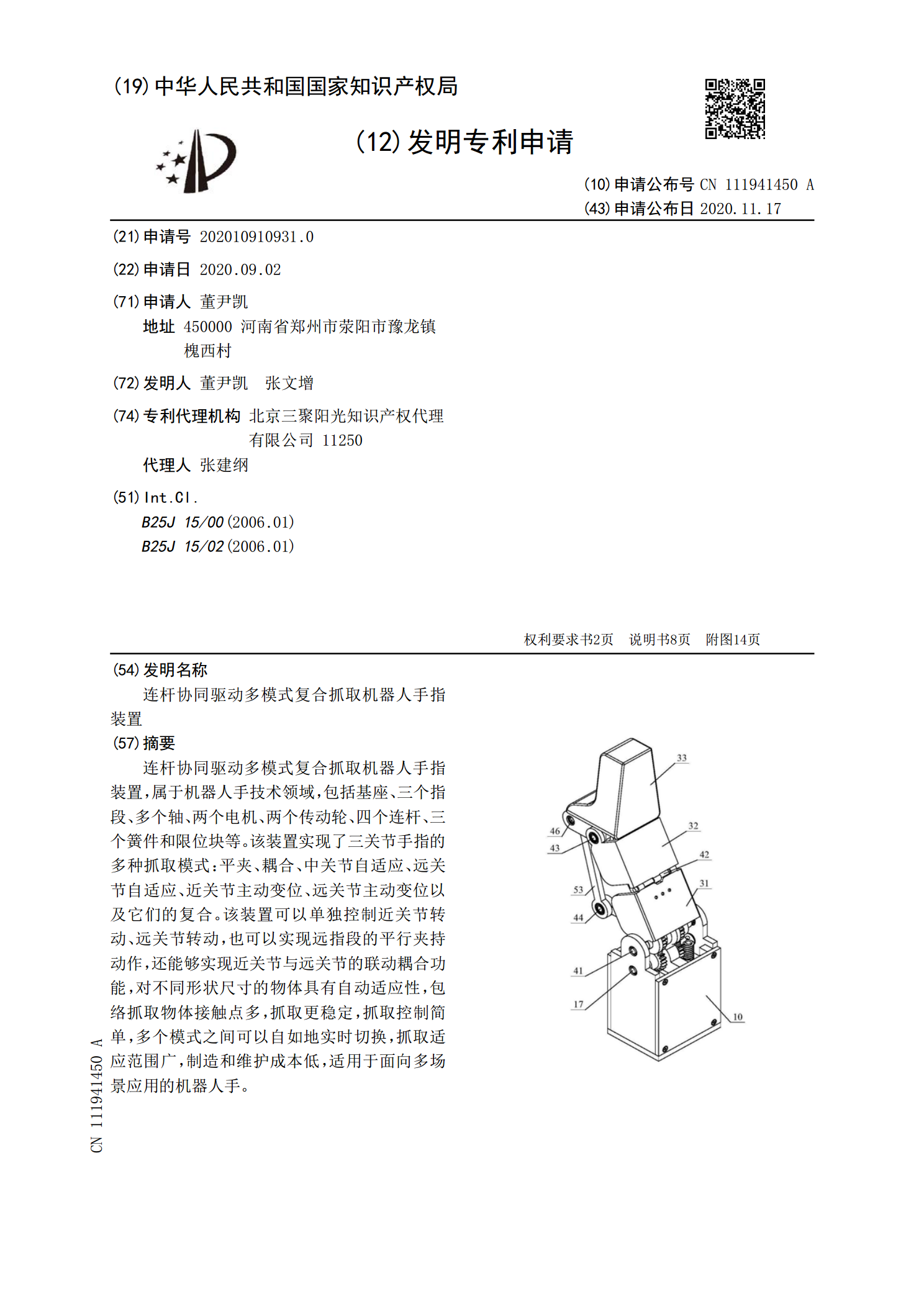
连杆协同驱动多模式复合抓取机器人手指装置.pdf
连杆协同驱动多模式复合抓取机器人手指装置,属于机器人手技术领域,包括基座、三个指段、多个轴、两个电机、两个传动轮、四个连杆、三个簧件和限位块等。该装置实现了三关节手指的多种抓取模式:平夹、耦合、中关节自适应、远关节自适应、近关节主动变位、远关节主动变位以及它们的复合。该装置可以单独控制近关节转动、远关节转动,也可以实现远指段的平行夹持动作,还能够实现近关节与远关节的联动耦合功能,对不同形状尺寸的物体具有自动适应性,包络抓取物体接触点多,抓取更稳定,抓取控制简单,多个模式之间可以自如地实时切换,抓取适应范围
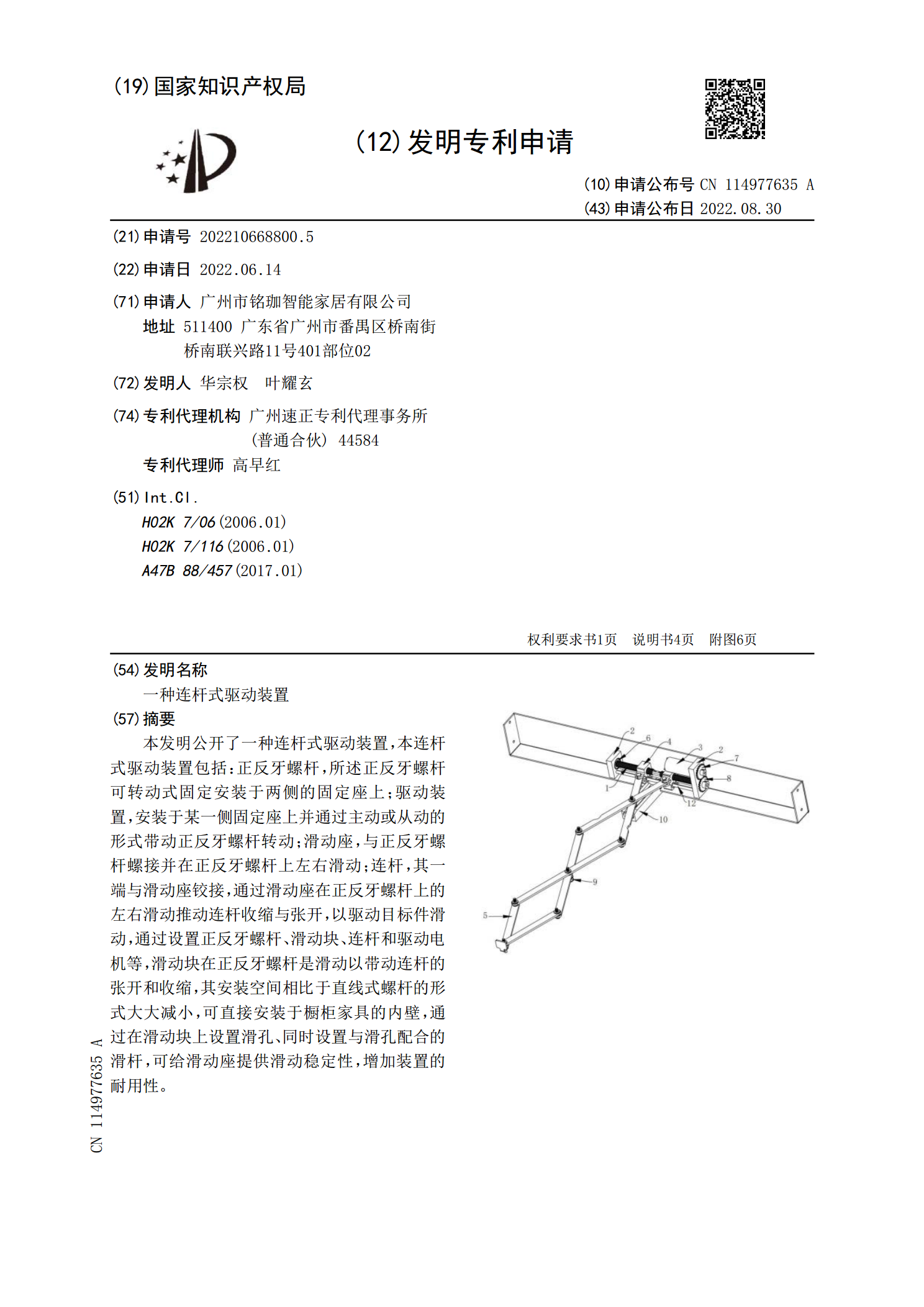
一种连杆式驱动装置.pdf
本发明公开了一种连杆式驱动装置,本连杆式驱动装置包括:正反牙螺杆,所述正反牙螺杆可转动式固定安装于两侧的固定座上;驱动装置,安装于某一侧固定座上并通过主动或从动的形式带动正反牙螺杆转动;滑动座,与正反牙螺杆螺接并在正反牙螺杆上左右滑动;连杆,其一端与滑动座铰接,通过滑动座在正反牙螺杆上的左右滑动推动连杆收缩与张开,以驱动目标件滑动,通过设置正反牙螺杆、滑动块、连杆和驱动电机等,滑动块在正反牙螺杆是滑动以带动连杆的张开和收缩,其安装空间相比于直线式螺杆的形式大大减小,可直接安装于橱柜家具的内壁,通过在滑动块
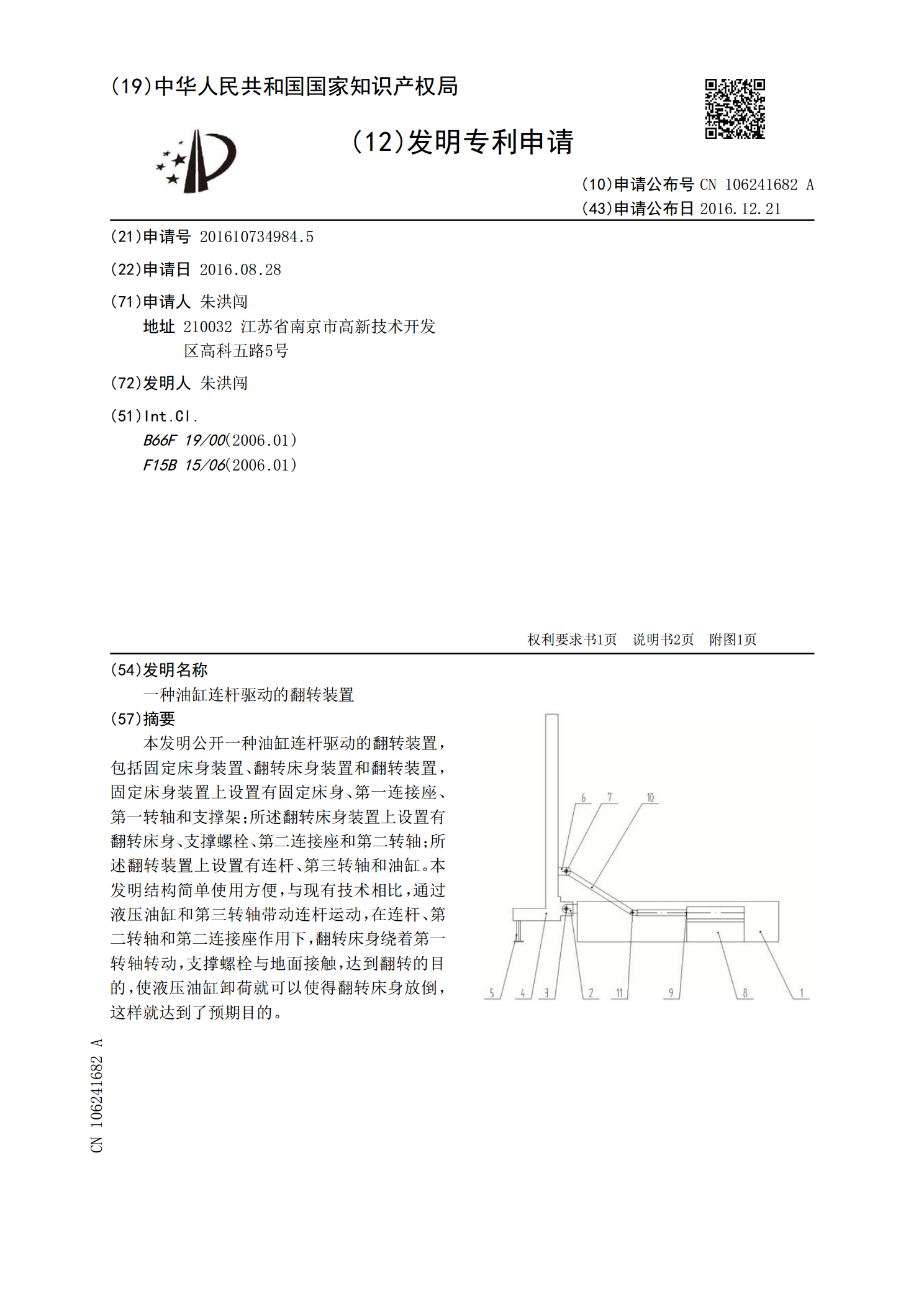
一种油缸连杆驱动的翻转装置.pdf
本发明公开一种油缸连杆驱动的翻转装置,包括固定床身装置、翻转床身装置和翻转装置,固定床身装置上设置有固定床身、第一连接座、第一转轴和支撑架;所述翻转床身装置上设置有翻转床身、支撑螺栓、第二连接座和第二转轴;所述翻转装置上设置有连杆、第三转轴和油缸。本发明结构简单使用方便,与现有技术相比,通过液压油缸和第三转轴带动连杆运动,在连杆、第二转轴和第二连接座作用下,翻转床身绕着第一转轴转动,支撑螺栓与地面接触,达到翻转的目的,使液压油缸卸荷就可以使得翻转床身放倒,这样就达到了预期目的。