
仿生机器鱼尾部摆动机构.pdf

Do****76

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿生机器鱼尾部摆动机构.pdf
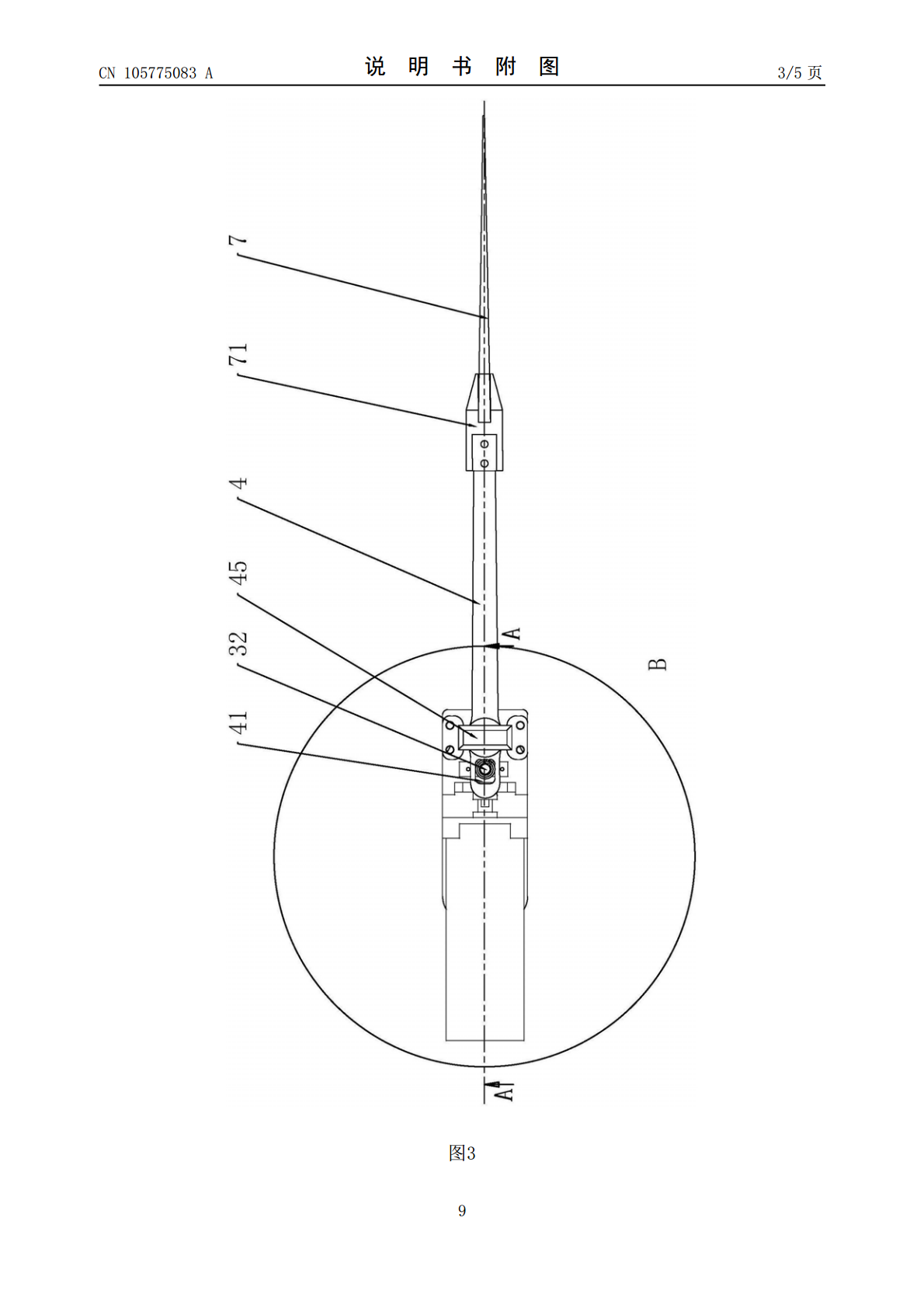
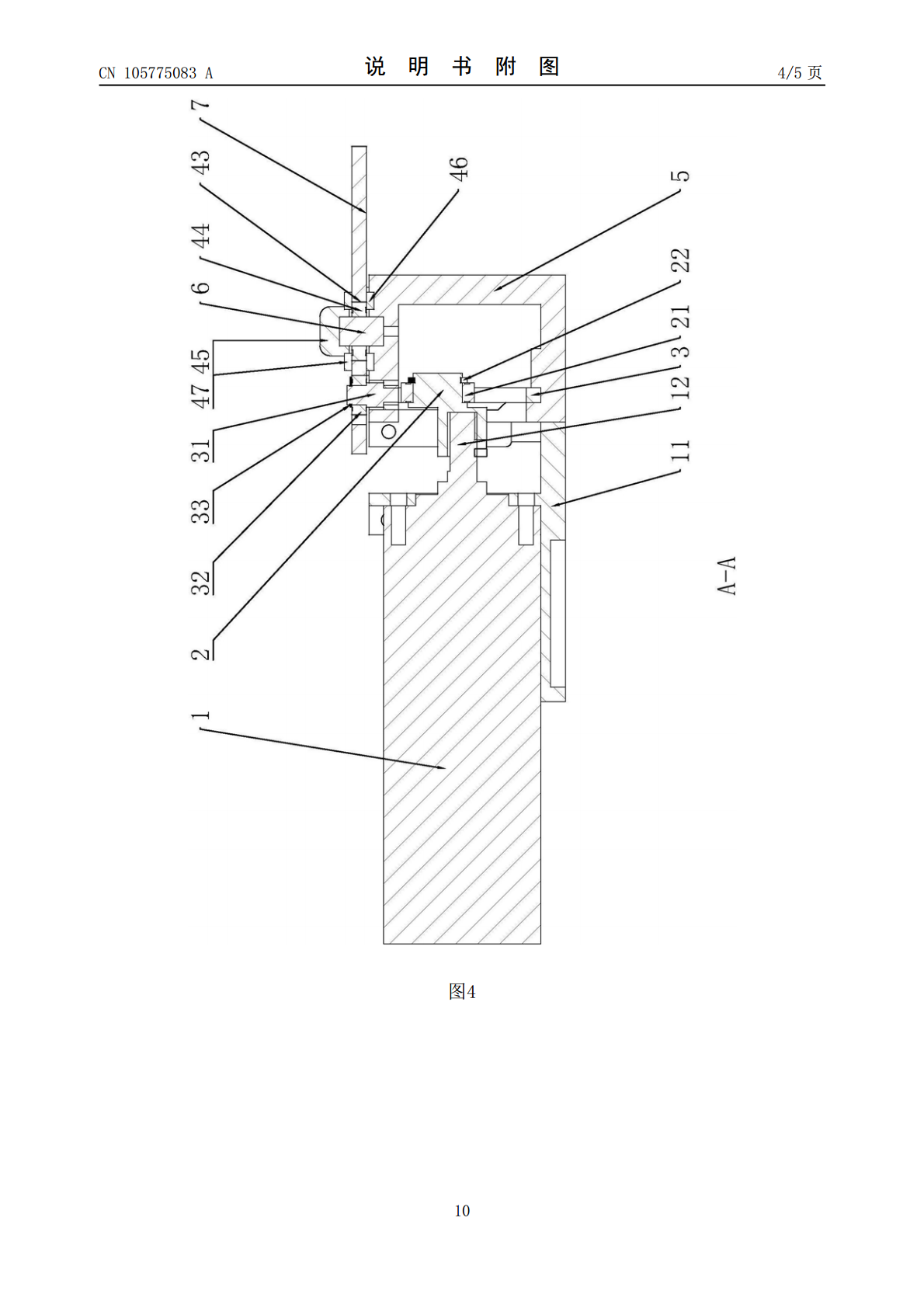
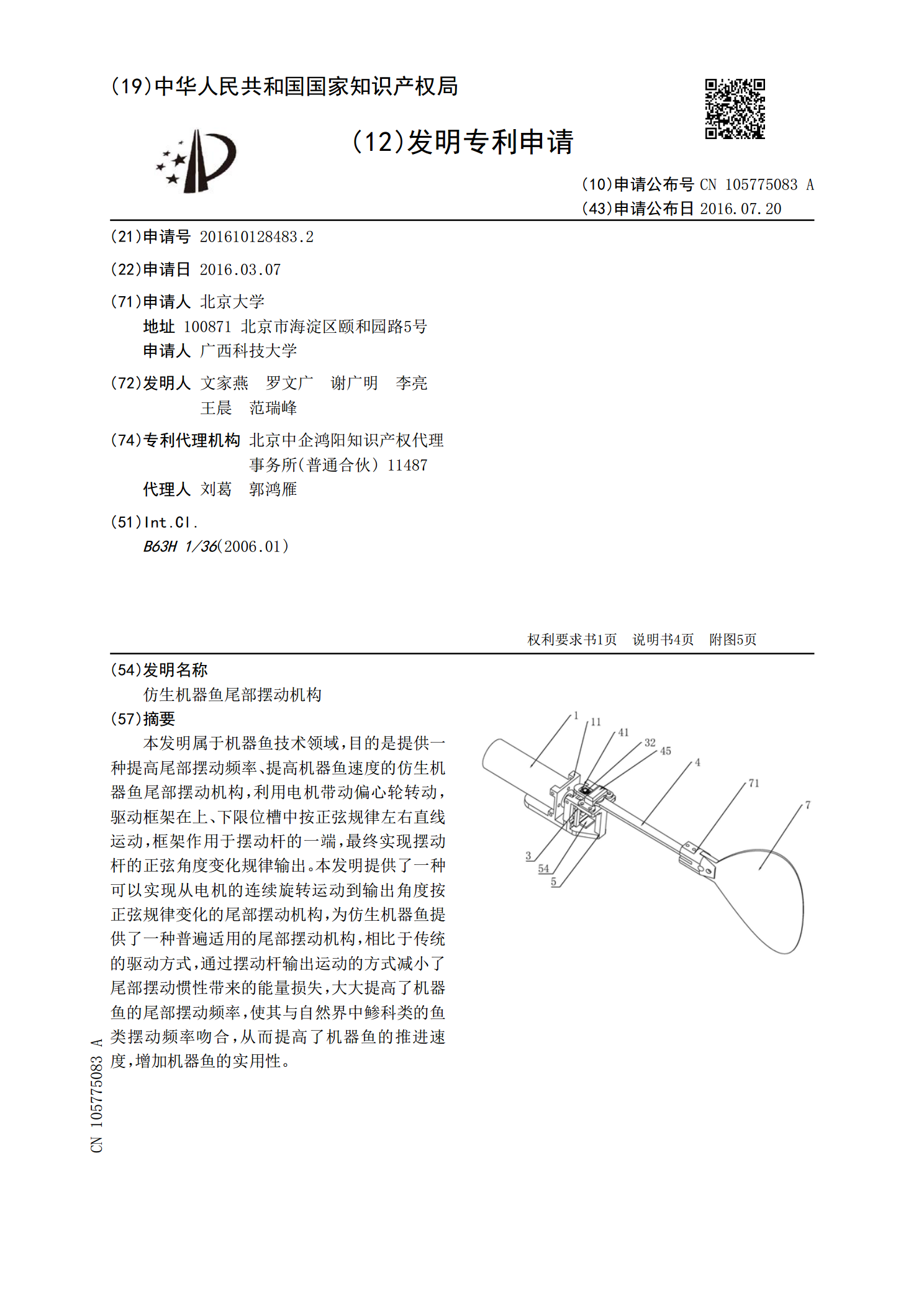
本发明属于机器鱼技术领域,目的是提供一种提高尾部摆动频率、提高机器鱼速度的仿生机器鱼尾部摆动机构,利用电机带动偏心轮转动,驱动框架在上、下限位槽中按正弦规律左右直线运动,框架作用于摆动杆的一端,最终实现摆动杆的正弦角度变化规律输出。本发明提供了一种可以实现从电机的连续旋转运动到输出角度按正弦规律变化的尾部摆动机构,为仿生机器鱼提供了一种普遍适用的尾部摆动机构,相比于传统的驱动方式,通过摆动杆输出运动的方式减小了尾部摆动惯性带来的能量损失,大大提高了机器鱼的尾部摆动频率,使其与自然界中鲹科类的鱼类摆动频率吻
一种仿生智能机器鱼的摆动机构.pdf
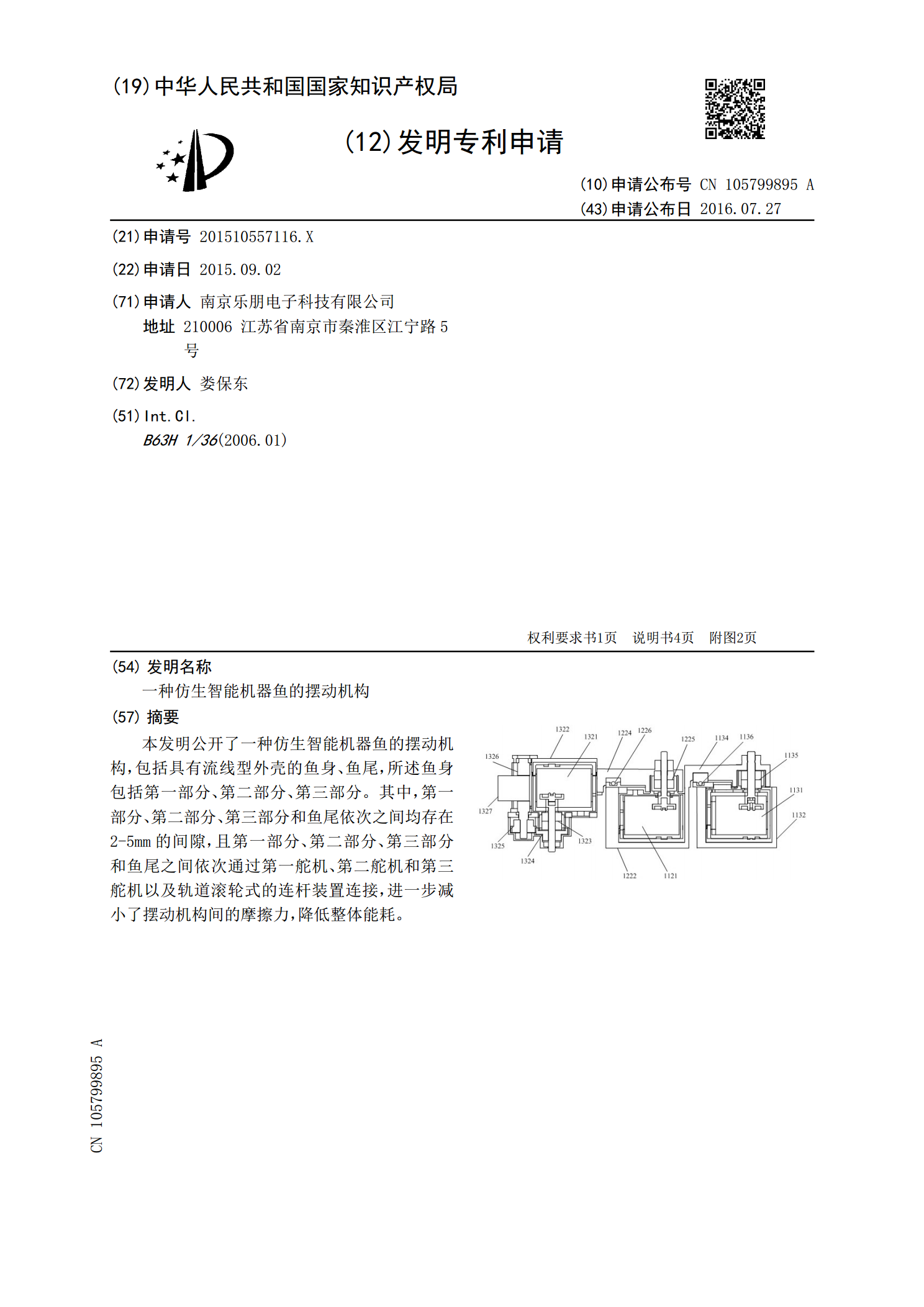
本发明公开了一种仿生智能机器鱼的摆动机构,包括具有流线型外壳的鱼身、鱼尾,所述鱼身包括第一部分、第二部分、第三部分。其中,第一部分、第二部分、第三部分和鱼尾依次之间均存在2-5mm的间隙,且第一部分、第二部分、第三部分和鱼尾之间依次通过第一舵机、第二舵机和第三舵机以及轨道滚轮式的连杆装置连接,进一步减小了摆动机构间的摩擦力,降低整体能耗。
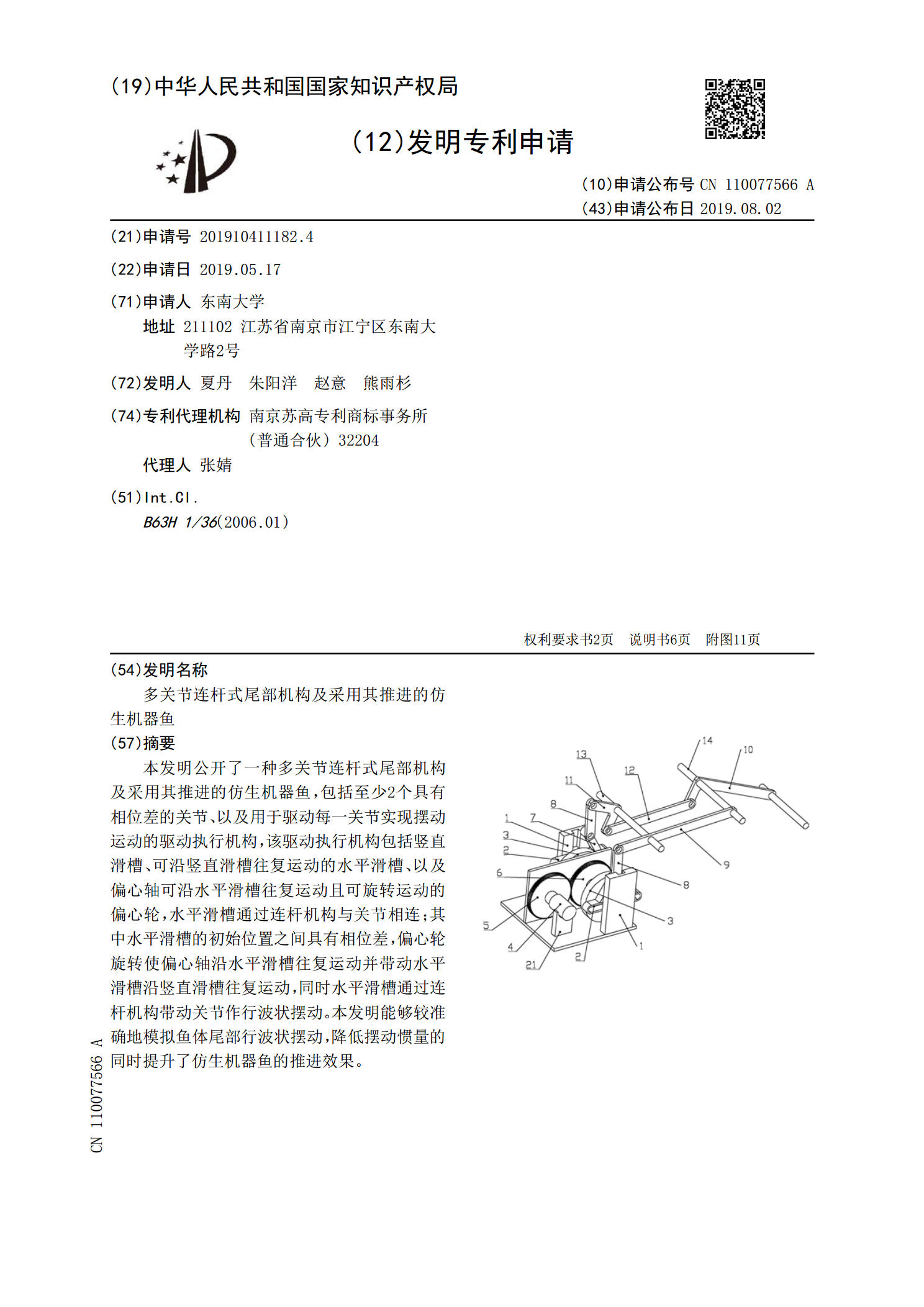
多关节连杆式尾部机构及采用其推进的仿生机器鱼.pdf
本发明公开了一种多关节连杆式尾部机构及采用其推进的仿生机器鱼,包括至少2个具有相位差的关节、以及用于驱动每一关节实现摆动运动的驱动执行机构,该驱动执行机构包括竖直滑槽、可沿竖直滑槽往复运动的水平滑槽、以及偏心轴可沿水平滑槽往复运动且可旋转运动的偏心轮,水平滑槽通过连杆机构与关节相连;其中水平滑槽的初始位置之间具有相位差,偏心轮旋转使偏心轴沿水平滑槽往复运动并带动水平滑槽沿竖直滑槽往复运动,同时水平滑槽通过连杆机构带动关节作行波状摆动。本发明能够较准确地模拟鱼体尾部行波状摆动,降低摆动惯量的同时提升了仿生机
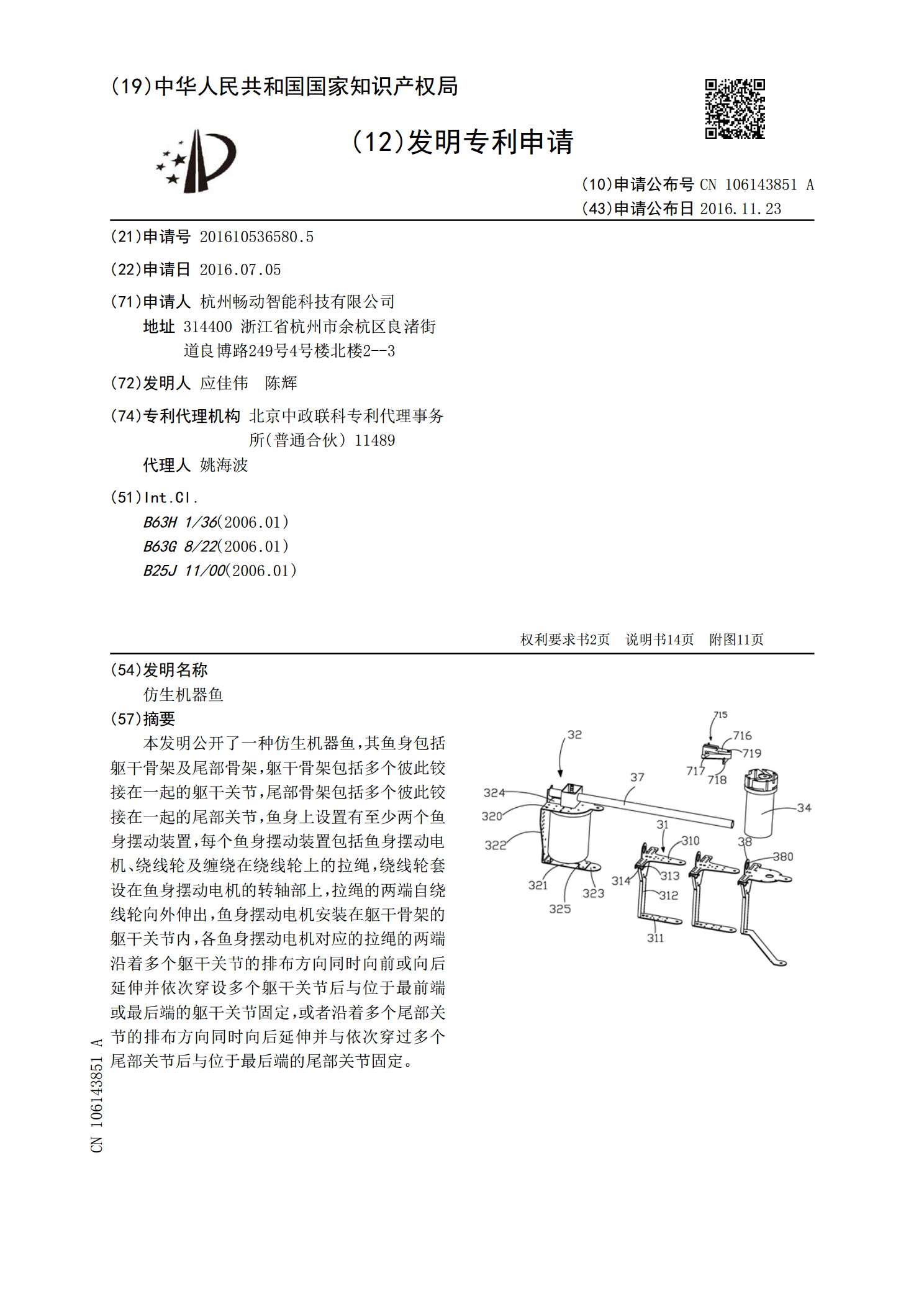
仿生机器鱼.pdf
本发明公开了一种仿生机器鱼,其鱼身包括躯干骨架及尾部骨架,躯干骨架包括多个彼此铰接在一起的躯干关节,尾部骨架包括多个彼此铰接在一起的尾部关节,鱼身上设置有至少两个鱼身摆动装置,每个鱼身摆动装置包括鱼身摆动电机、绕线轮及缠绕在绕线轮上的拉绳,绕线轮套设在鱼身摆动电机的转轴部上,拉绳的两端自绕线轮向外伸出,鱼身摆动电机安装在躯干骨架的躯干关节内,各鱼身摆动电机对应的拉绳的两端沿着多个躯干关节的排布方向同时向前或向后延伸并依次穿设多个躯干关节后与位于最前端或最后端的躯干关节固定,或者沿着多个尾部关节的排布方向同

一种仿生智能机器鱼的鱼头机构.pdf
本发明公开了一种仿生智能机器鱼的鱼头机构,包括仿生物鱼的流线型鱼头壳体,所述鱼头壳体内部设置有控制模块和充电电池,充电电池与控制模块之间电连接;鱼头壳体下部设置有无线充电模块的接收端机构,无线充电模块的接收端机构与充电电池之间电连接,接收端机构包括电量检测模块、接收线圈、无线充电接收模块和接收端防水外壳。通过设置无线充电模块,从而替代了仿生机器鱼的传统充电模式,达到全水下作业的目的,避免了定时将仿生机器鱼打捞充电的麻烦。