
仿昆虫蠕动式双轮双臂巡线机器人机械结构及其越障方法.pdf

纪阳****公主


1/8

2/8
3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿昆虫蠕动式双轮双臂巡线机器人机械结构及其越障方法.pdf
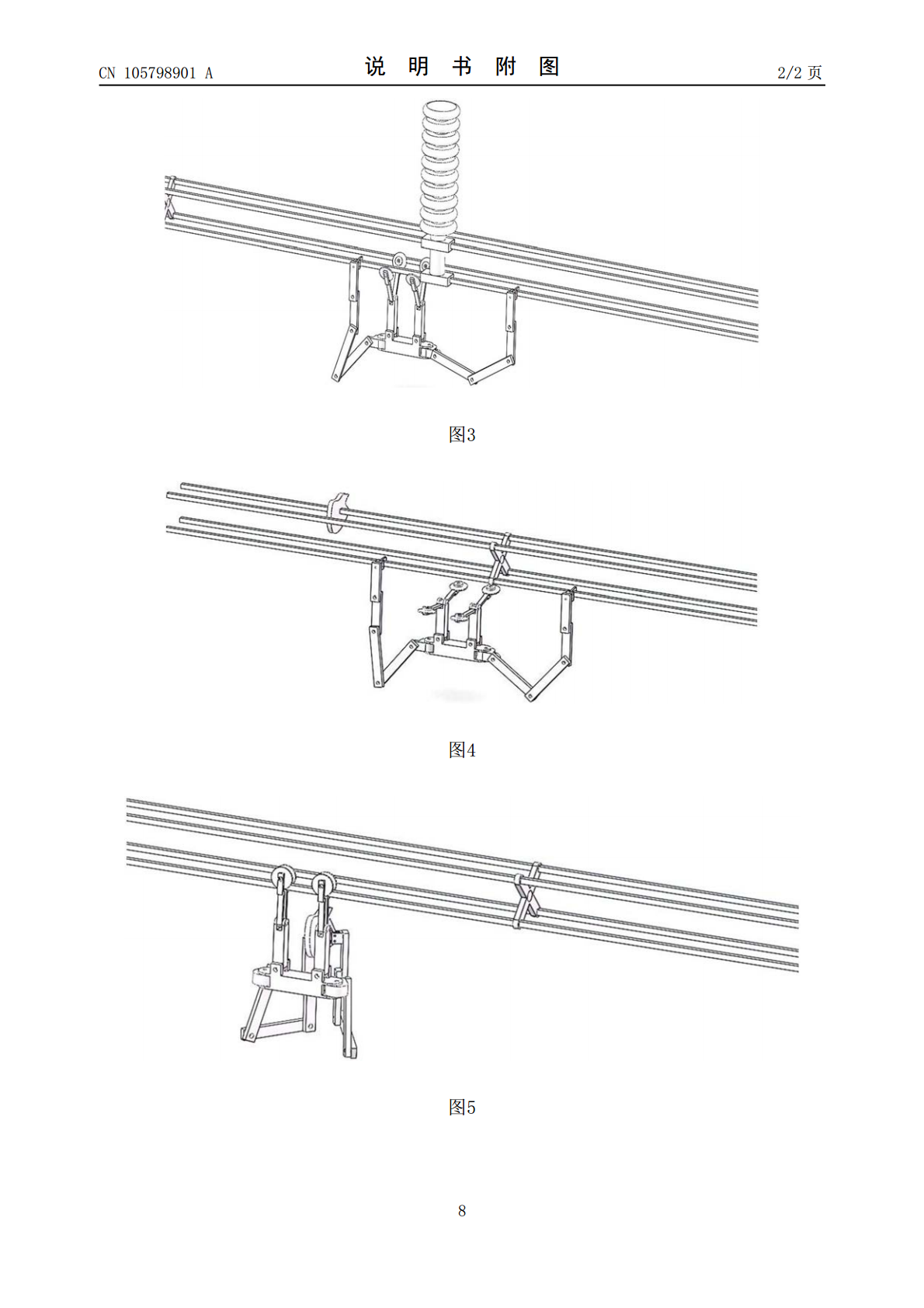
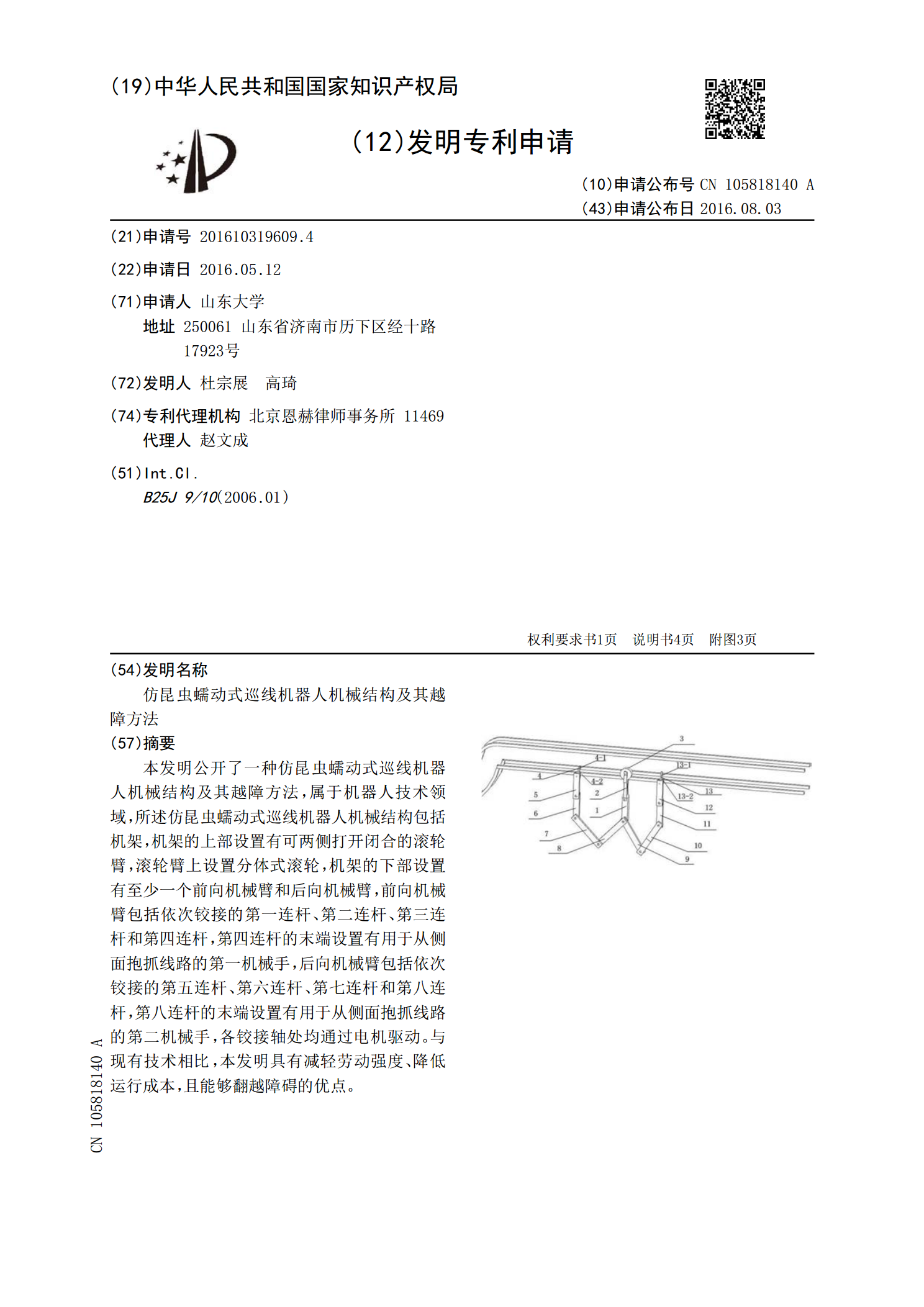
本发明公开了一种仿昆虫蠕动式双轮双臂巡线机器人机械结构及其越障方法,属于机器人技术领域,所述仿昆虫蠕动式双轮双臂巡线机器人机械结构包括机架,机架的上部设置有可两侧打开闭合的滚轮臂,滚轮臂上设置分体式滚轮,机架的下部设置有至少一个前向机械臂和后向机械臂,各铰接轴处均通过电机驱动。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍的优点。
仿昆虫蠕动式巡线机器人机械结构及其越障方法.pdf
本发明公开了一种仿昆虫蠕动式巡线机器人机械结构及其越障方法,属于机器人技术领域,所述仿昆虫蠕动式巡线机器人机械结构包括机架,机架的上部设置有可两侧打开闭合的滚轮臂,滚轮臂上设置分体式滚轮,机架的下部设置有至少一个前向机械臂和后向机械臂,前向机械臂包括依次铰接的第一连杆、第二连杆、第三连杆和第四连杆,第四连杆的末端设置有用于从侧面抱抓线路的第一机械手,后向机械臂包括依次铰接的第五连杆、第六连杆、第七连杆和第八连杆,第八连杆的末端设置有用于从侧面抱抓线路的第二机械手,各铰接轴处均通过电机驱动。与现有技术相比,
蛇形缠绕式巡线机器人机械结构及其越障方法.pdf
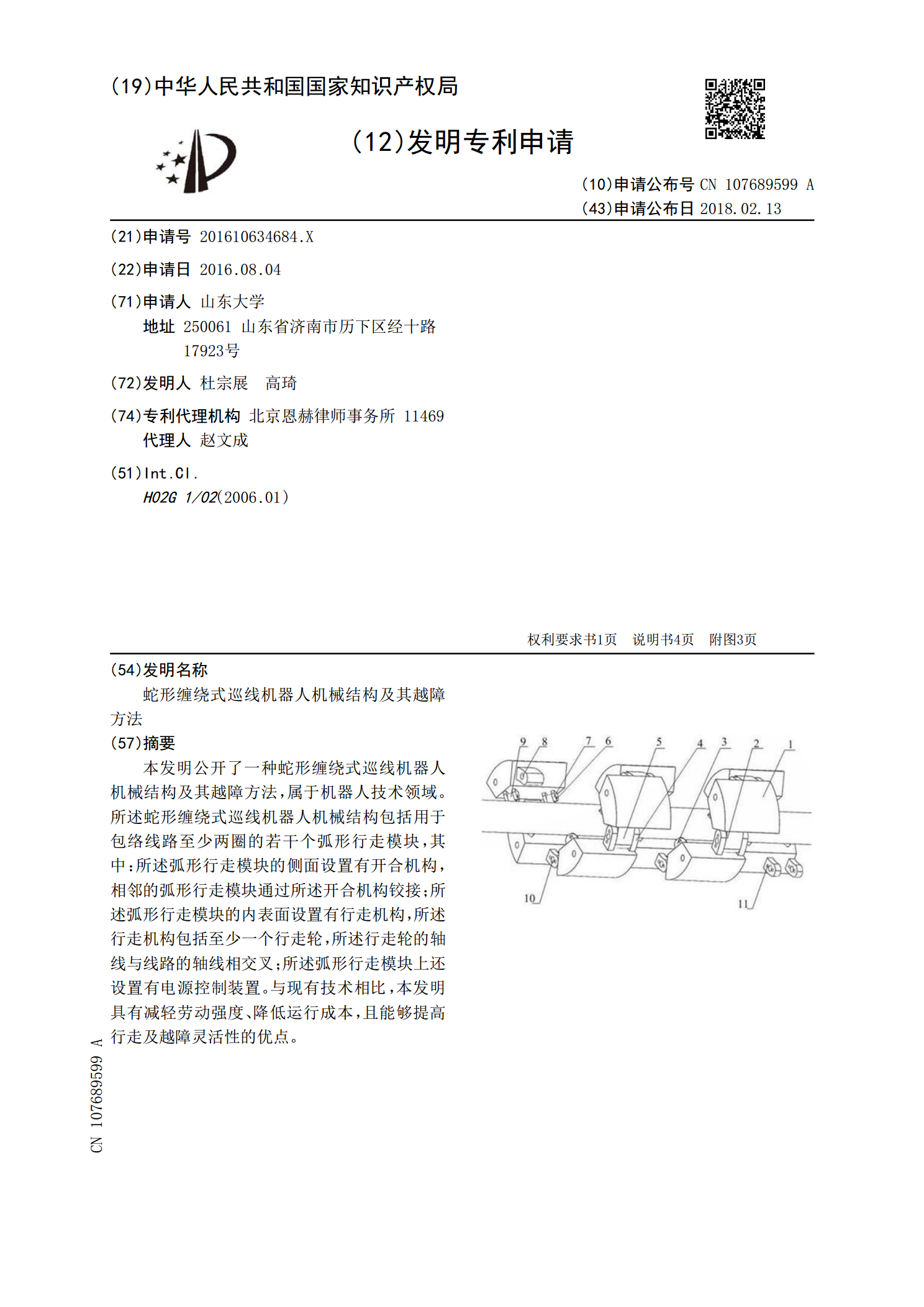
本发明公开了一种蛇形缠绕式巡线机器人机械结构及其越障方法,属于机器人技术领域。所述蛇形缠绕式巡线机器人机械结构包括用于包络线路至少两圈的若干个弧形行走模块,其中:所述弧形行走模块的侧面设置有开合机构,相邻的弧形行走模块通过所述开合机构铰接;所述弧形行走模块的内表面设置有行走机构,所述行走机构包括至少一个行走轮,所述行走轮的轴线与线路的轴线相交叉;所述弧形行走模块上还设置有电源控制装置。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够提高行走及越障灵活性的优点。

单臂驱动双臂越障式巡线机器人.pdf
本发明公开了一种单臂驱动双臂越障式巡线机器人,包括机架(4)、越障前臂(3)、越障后臂(1)和驱动轮(2),所述越障前臂(3)位于机架(4)两侧,由前臂夹持机构(31)、前臂伸缩机构(34)和前臂整体旋转机构(36)组成;所述越障后臂(1)从机架(4)中部向外伸出,越障后臂(1)由后臂夹持机构(11)、后臂伸缩机构(14)和后臂整体旋转机构(15)组成;所述驱动轮(2)位于机架(4)中央正上方,通过轴承支座连接机架(4),驱动轮(2)由橡胶轮(21)、左右滚珠丝杆(22)和驱动装置(23)组成。本发明具有

行走机构、巡线机器人机械结构及其越障方法.pdf
本发明公开了一种行走机构、巡线机器人机械结构及其越障方法,属于机器人技术领域。所述巡线机器人机械结构包括机架,所述机架上设置有行走轮和夹紧轮组合式行走机构,所述行走轮和夹紧轮组合式行走机构包括至少一个行走单元,所述行走单元包括一对行走剖分轮,所述行走剖分轮包括主动行走剖分轮和被动行走剖分轮,所述主动行走剖分轮和被动行走剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂;所述行走剖分轮下方设置有夹紧剖分轮,所述夹紧剖分轮包括第一夹紧剖分轮和第二夹紧剖分轮,所述各夹紧剖分轮的下端均设置有丝杠电机和丝杠。与现有技