
一种具有三维平动的并联机构.pdf

是你****优呀


1/7
2/7
3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具有三维平动的并联机构.pdf
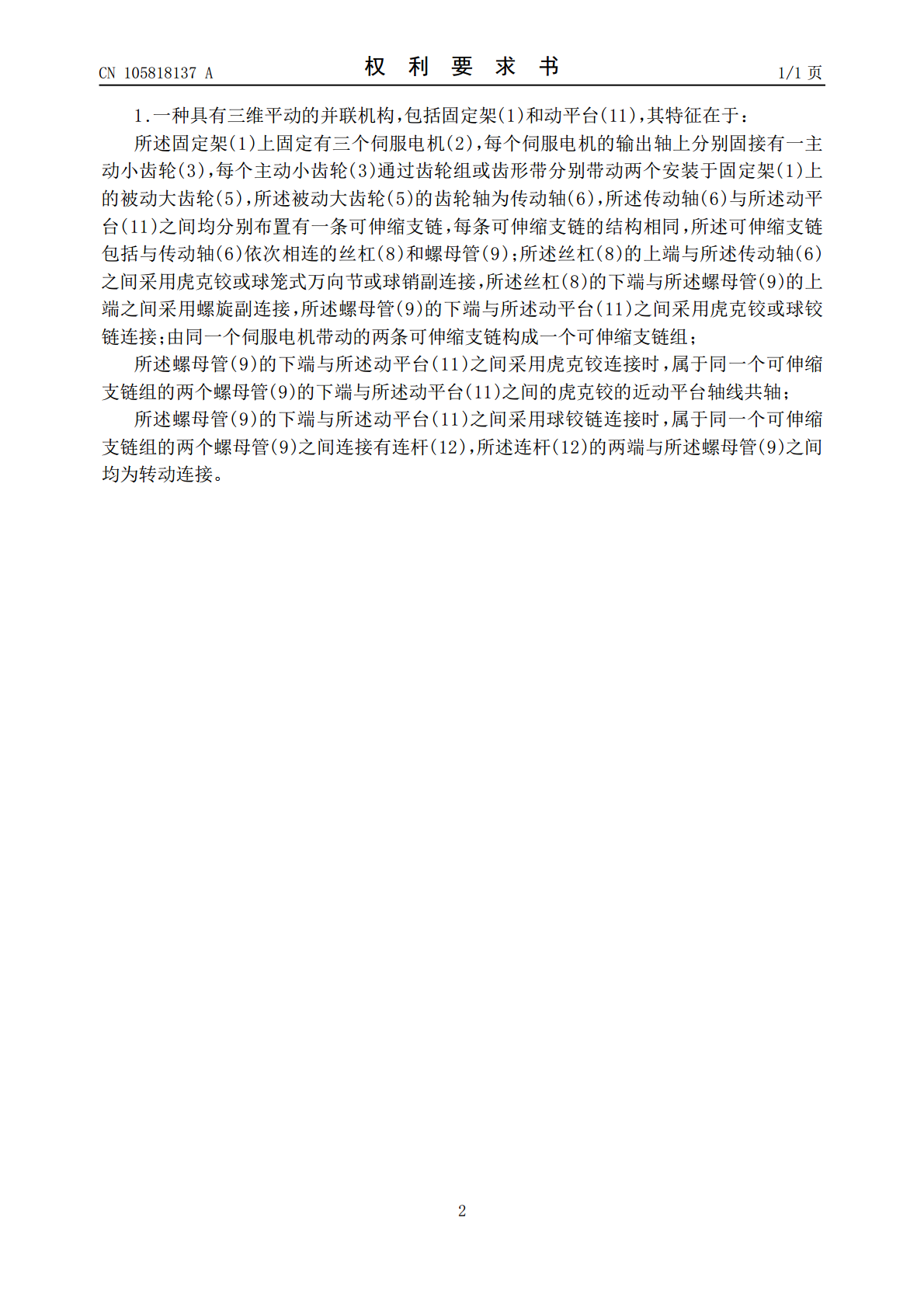
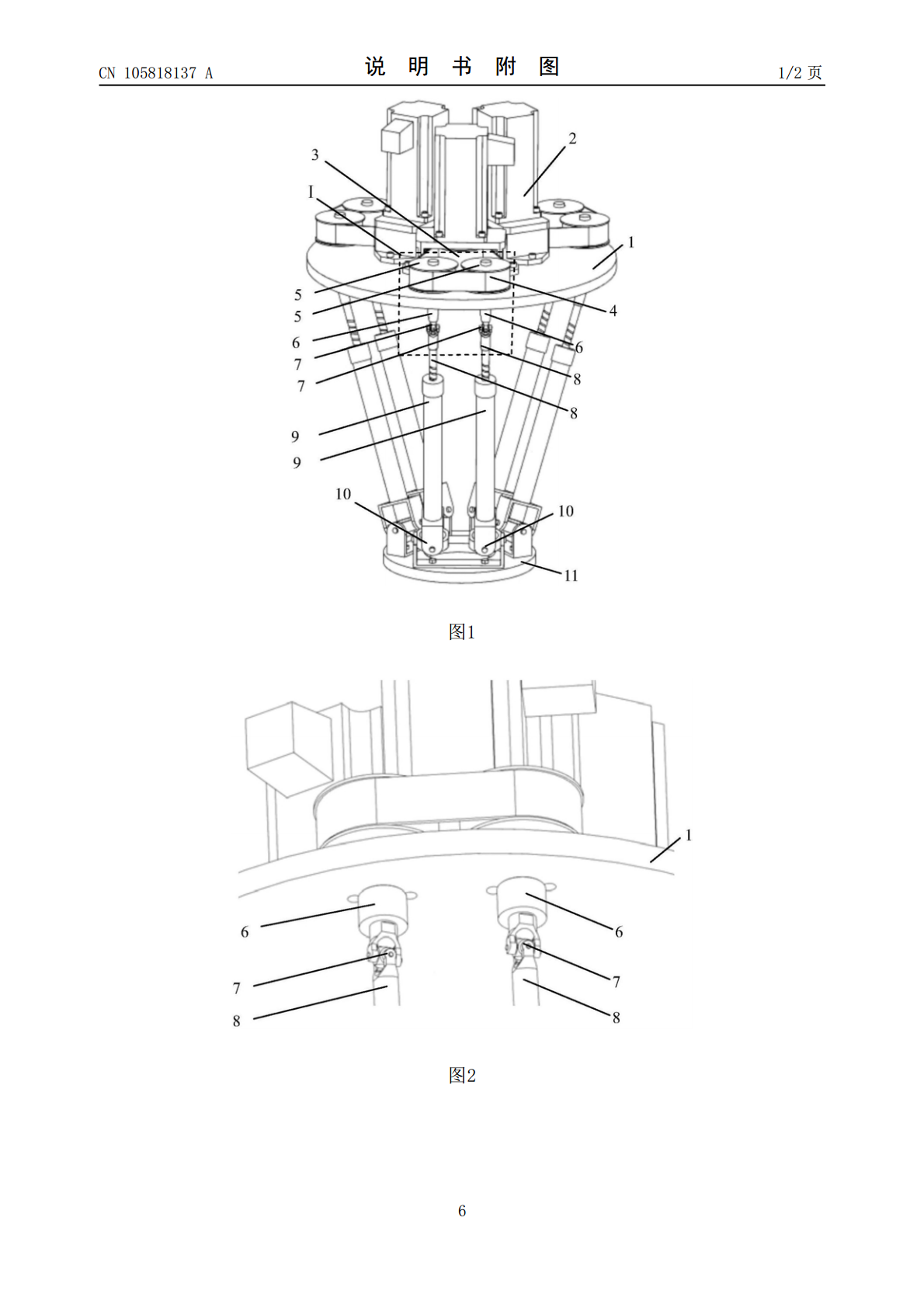
本发明公开了一种具有三维平动的并联机构,包括固定架和动平台,固定架上固定有三个伺服电机,每个伺服电机的输出轴上分别固接有一主动小齿轮,每个主动小齿轮带动两个安装于固定架上的被动大齿轮,被动大齿轮的齿轮轴与动平台之间均分别布置有一条可伸缩支链,每条可伸缩支链的结构相同,可伸缩支链包括与齿轮轴依次相连的丝杠和螺母管;丝杠的上端与齿轮轴之间采用虎克铰连接,丝杠的下端与螺母管的上端之间采用螺旋副连接,螺母管的下端与动平台之间采用虎克铰或球铰链连接;由同一个伺服电机带动的两条可伸缩支链构成一个可伸缩支链组。本发明中

一种具有二维平动的并联机构.pdf
本发明公开了一种具有二维平动的并联机构,包括固定架和动平台,固定架与动平台之间连接有三条结构相同的可伸缩支链;可伸缩支链包括圆锥齿轮副、被动同步带轮、连接轴和由螺母与丝杠构成的螺旋副,螺母和圆锥齿轮副中的被动齿轮同轴固接,被动同步带轮与圆锥齿轮副中的主动齿轮同轴固接;一侧的可伸缩支链由第一电机驱动,另外两个可伸缩支链由第二电机驱动;一侧的可伸缩支链的轴线与由另外两个可伸缩支链的轴线所形成的平面共面或平行;控制两个电机三条可伸缩支链实现伸缩运动时可带动动平台实现二维平动。本发明利用圆锥齿轮副特点,驱动螺母回

基于Delta机构的冗余驱动三维平动并联机构研究.docx
基于Delta机构的冗余驱动三维平动并联机构研究基于Delta机构的冗余驱动三维平动并联机构研究摘要本文介绍了一种基于Delta机构的冗余驱动三维平动并联机构。该机构采用冗余驱动,实现了机构从完全平动到带剖面偏移的三维运动。论文对该机构进行了建模分析,探讨了冗余驱动与平面六杆机构的等效性,详细介绍了机构运动学和静力学分析。仿真结果表明,该机构在三维平动方面有较好的性能表现,可实现多样化的运动轨迹和工作空间。关键词:Delta机构;冗余驱动;三维平动并联机构;运动学分析;静力学分析1.引言随着工业自动化和机

一种新型空间平动并联机构.pdf
本发明公开了一种新型空间平动并联机构,包括固定架上固定的三个伺服电机,两个伺服电机的输出轴上分别固接有一主动小齿轮,每个主动小齿轮分别带动两个安装于固定架上的被动大齿轮,被动大齿轮的齿轮轴及另外一个伺服电机的输出轴均分别固结一传动轴;传动轴与动平台之间均分别布置有一条可伸缩支链,可伸缩支链包括与传动轴依次相连的丝杠和螺母管;螺母管与动平台之间采用虎克铰或球铰链连接;由同一个伺服电机带动的两条可伸缩支链构成一个可伸缩支链组。本发明伺服电机固定,利用虎克铰传递转动于螺旋副,实现动平台的三维平动,可伸缩支链只受

三维平动并联机床的运动分析.docx
三维平动并联机床的运动分析题目:三维平动并联机床的运动分析摘要:随着制造技术的不断发展,机床的性能要求也越来越高。三维平动并联机床作为一种先进的机床结构,通过并联机构实现了机床的高速、高精度和高刚度运动控制。本论文主要通过对三维平动并联机床的构造、运动学和动力学分析,深入研究了其运动特性和优势。1.引言机床是制造行业中最重要的设备之一,关系到产品质量和生产效率。而三维平动并联机床作为一种新型的机床结构,具有较高的刚度和精度,被广泛应用于高精度加工领域。因此,对其运动特性的分析具有重要的理论和应用意义。2.