
一种新型空间平动并联机构.pdf

梅雪****67


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型空间平动并联机构.pdf
本发明公开了一种新型空间平动并联机构,包括固定架上固定的三个伺服电机,两个伺服电机的输出轴上分别固接有一主动小齿轮,每个主动小齿轮分别带动两个安装于固定架上的被动大齿轮,被动大齿轮的齿轮轴及另外一个伺服电机的输出轴均分别固结一传动轴;传动轴与动平台之间均分别布置有一条可伸缩支链,可伸缩支链包括与传动轴依次相连的丝杠和螺母管;螺母管与动平台之间采用虎克铰或球铰链连接;由同一个伺服电机带动的两条可伸缩支链构成一个可伸缩支链组。本发明伺服电机固定,利用虎克铰传递转动于螺旋副,实现动平台的三维平动,可伸缩支链只受
一种新型三自由度平动并联机构.pdf
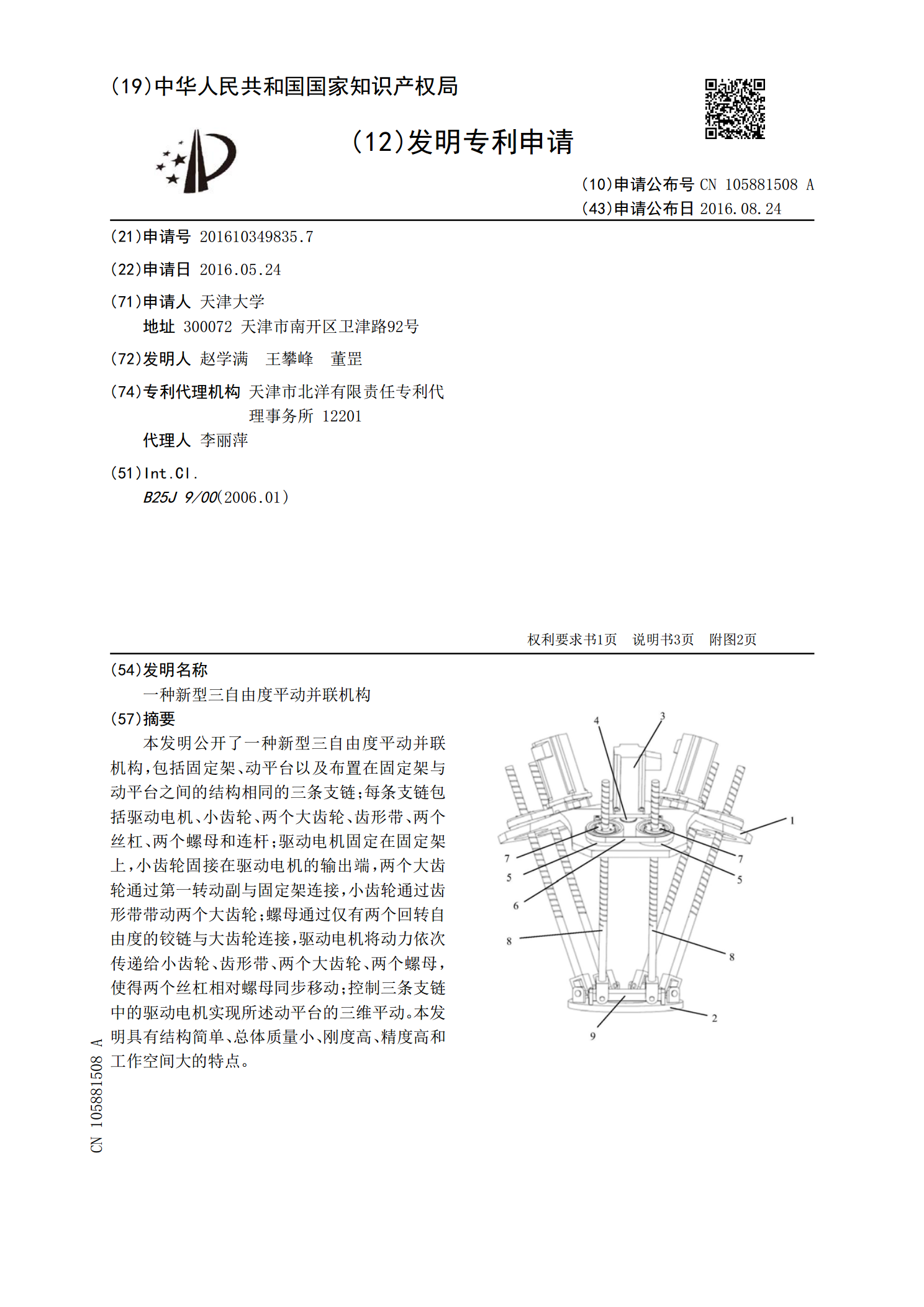
本发明公开了一种新型三自由度平动并联机构,包括固定架、动平台以及布置在固定架与动平台之间的结构相同的三条支链;每条支链包括驱动电机、小齿轮、两个大齿轮、齿形带、两个丝杠、两个螺母和连杆;驱动电机固定在固定架上,小齿轮固接在驱动电机的输出端,两个大齿轮通过第一转动副与固定架连接,小齿轮通过齿形带带动两个大齿轮;螺母通过仅有两个回转自由度的铰链与大齿轮连接,驱动电机将动力依次传递给小齿轮、齿形带、两个大齿轮、两个螺母,使得两个丝杠相对螺母同步移动;控制三条支链中的驱动电机实现所述动平台的三维平动。本发明具有结
一种新型三自由度平动并联机构.pdf
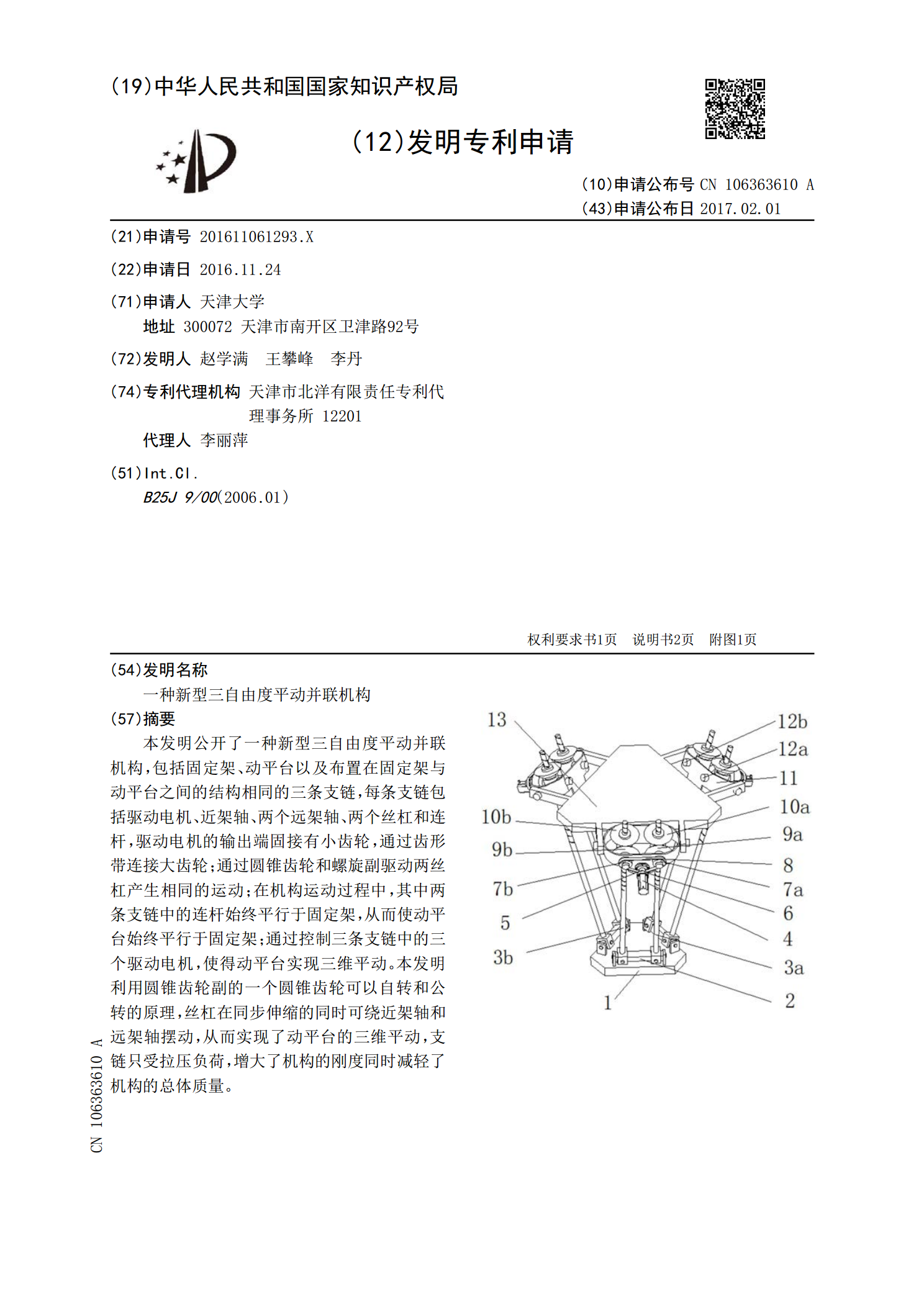
本发明公开了一种新型三自由度平动并联机构,包括固定架、动平台以及布置在固定架与动平台之间的结构相同的三条支链,每条支链包括驱动电机、近架轴、两个远架轴、两个丝杠和连杆,驱动电机的输出端固接有小齿轮,通过齿形带连接大齿轮;通过圆锥齿轮和螺旋副驱动两丝杠产生相同的运动;在机构运动过程中,其中两条支链中的连杆始终平行于固定架,从而使动平台始终平行于固定架;通过控制三条支链中的三个驱动电机,使得动平台实现三维平动。本发明利用圆锥齿轮副的一个圆锥齿轮可以自转和公转的原理,丝杠在同步伸缩的同时可绕近架轴和远架轴摆动,

一种新型并联机构的工作空间分析.docx
一种新型并联机构的工作空间分析随着机器人技术的不断发展,在自动化领域,机器人被广泛应用于制造业、医疗、教育、娱乐等领域。机器人由机械构件、电子组件和控制软件等部分组成,机械构件是机器人机构的关键部分,它将机器人的动作转化为最终的基础工作,因此,机械结构的设计和选择对于机器人性能至关重要。并联机构则是机械构件的一种重要构造方式,在机器人制造领域得到广泛的应用。本文主要探讨一种新型并联机构的工作空间分析,以及其在机器人领域中的应用。一、并联机构的基础概念并联机构是由多个运动部件和连接部件组成的机械结构,通过运

三平动并联机构动力学建模与工作空间分析.docx
三平动并联机构动力学建模与工作空间分析摘要:在机器人领域,平动并联机构是一个重要且广泛应用的机构,尤其在工作空间分析方面,平动并联机构是首选。本文基于三平动并联机构,通过建立动力学模型,对机器人进行分析,并对其工作空间进行分析,为机器人建模和应用提供理论基础。一、引言在现代机器人技术中,机械手臂和平动并联机构作为机器人中的一种机械结构应用广泛。由于平动并联机构可以实现在较小体积以及较大工作范围下进行精确的运动控制,因此被普遍使用于生产线上。本文通过对三平动并联机构动力学建模和工作空间分析,为机器人应用的优