
一种转向机构及包括该机构的轮式机器人.pdf

小琛****82

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种转向机构及包括该机构的轮式机器人.pdf
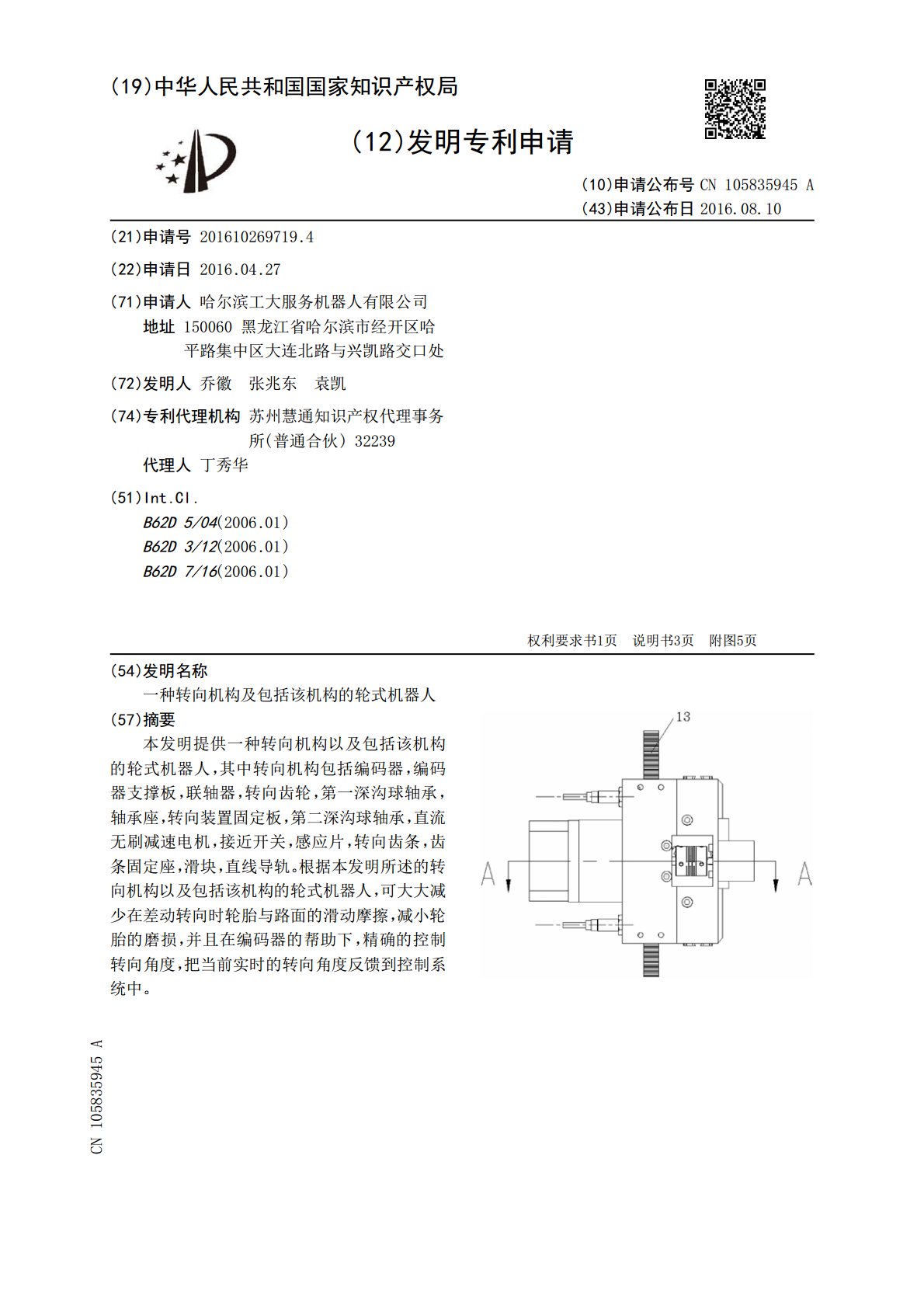
本发明提供一种转向机构以及包括该机构的轮式机器人,其中转向机构包括编码器,编码器支撑板,联轴器,转向齿轮,第一深沟球轴承,轴承座,转向装置固定板,第二深沟球轴承,直流无刷减速电机,接近开关,感应片,转向齿条,齿条固定座,滑块,直线导轨。根据本发明所述的转向机构以及包括该机构的轮式机器人,可大大减少在差动转向时轮胎与路面的滑动摩擦,减小轮胎的磨损,并且在编码器的帮助下,精确的控制转向角度,把当前实时的转向角度反馈到控制系统中。

电动转向装置的倾斜机构以及包括该倾斜机构的电动转向装置.pdf
一种倾斜机构,其提供用于使电动转向装置的蜗杆轴朝向蜗轮倾斜的力,其包括:被插入到电动转向装置的壳体的插入空间中的引导块;被布置在引导块中的弹性部件;以及插塞,其被可移动地布置在引导块中并且被弹性部件弹性地支撑,以用于将倾斜力施加到支撑蜗杆轴的轴承。

电动转向装置的倾斜机构以及包括该倾斜机构的电动转向装置.pdf
一种倾斜机构,其提供用于使电动转向装置的蜗杆轴朝向蜗轮倾斜的力,其包括:被插入到电动转向装置的插入空间中的引导块;被布置在引导块中的弹性部件;以及插塞,其被可移动地布置在引导块中并且将倾斜力施加到被弹性部件弹性地支撑的轴承,从而支撑蜗杆轴。插塞和引导块能互相螺纹连接。

一种原地转向的轮式机器人底座机构.pdf
本发明公开了一种原地转向的轮式机器人底座机构,该底座机构包括有机架组件、轮系组件、转向和移动组件三个部分,轮系组件安装在机架组件的下方,转向和移动组件用于驱动轮系组件的转向和平移。当载体安装在机架上时,轮系组件的运动由转接件来传递,转接件的驱动力由转向和移动组件中的两个电机、四个同步带以及八个带轮协作实现,因此保证了机架的平稳转向和移动。本发明底座机构的转向由第一步进电机单独驱动完成,底座机构的移动由第二步进电机单独驱动完成,本底座机构只用两个电机既可实现转向和移动功能,又可使两种运动完全解耦,控制简单。

车辆的转向机构及具有该转向机构的车辆.pdf
本发明公开了一种车辆的转向机构及具有该转向机构的车辆,所述车辆的转向机构包括转向器;两个转向横拉杆,转向器连接在两个转向横拉杆之间;两个转向节,两个转向节分别位于转向器的两侧,其中每个转向节的一端均适于与同侧的车辆的转向轮相连,转向节的另一端均与同侧的转向横拉杆相连;安装支架,转向器安装在安装支架上,且安装支架设置成沿车辆的前后方向可移动以使转向机构在第一状态和第二状态之间切换,转向机构位于第一状态时,两侧的转向轮同向偏转,转向机构位于第二状态时,两侧的转向轮相对偏转并偏转至两侧的转向轮之间的距离从前向后