
一种基于对称冗余并联机构的焊接机器人焊接机械手.pdf

An****99


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于对称冗余并联机构的焊接机器人焊接机械手.pdf
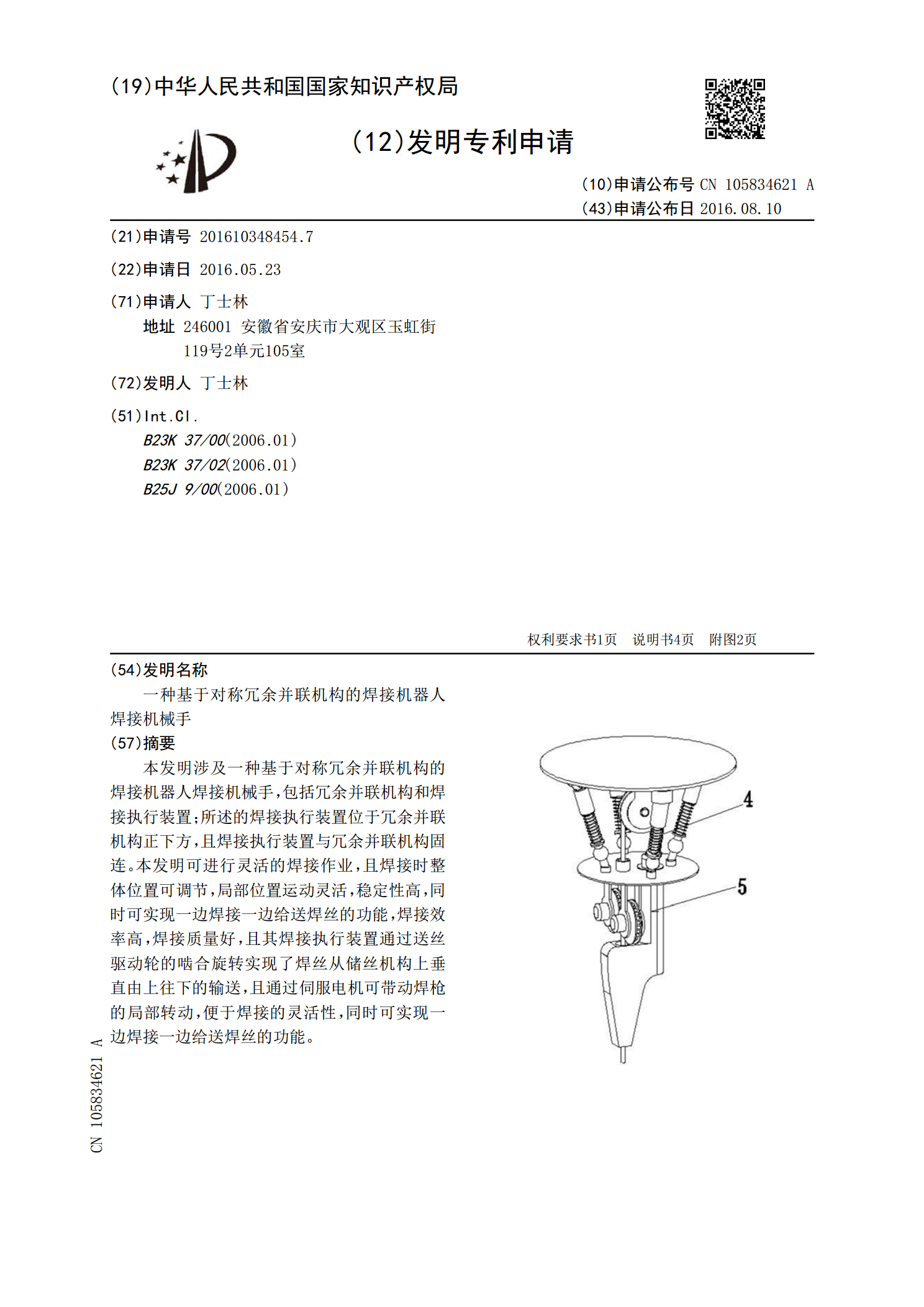
本发明涉及一种基于对称冗余并联机构的焊接机器人焊接机械手,包括冗余并联机构和焊接执行装置;所述的焊接执行装置位于冗余并联机构正下方,且焊接执行装置与冗余并联机构固连。本发明可进行灵活的焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同时可实现一边焊接一边给送焊丝的功能,焊接效率高,焊接质量好,且其焊接执行装置通过送丝驱动轮的啮合旋转实现了焊丝从储丝机构上垂直由上往下的输送,且通过伺服电机可带动焊枪的局部转动,便于焊接的灵活性,同时可实现一边焊接一边给送焊丝的功能。

一种基于delta 并联机构的焊接机器人焊接机械手.pdf
本发明涉及一种基于delta并联机构的焊接机器人焊接机械手,包括delta并联机构和焊接执行装置;所述的焊接执行装置位于delta并联机构正下方,且焊接执行装置与delta并联机构固连。本发明可进行灵活焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同时可实现一边焊接一边给送焊丝的功能,焊接效率高,焊接质量好,且焊接执行装置通过送丝驱动轮的啮合旋转实现了焊丝从储丝机构上垂直由上往下的输送,且通过伺服电机可带动焊枪的局部转动,便于焊接的灵活性,同时可实现一边焊接一边给送焊丝的功能。
一种基于Stewart 并联机构的焊接机器人焊接机械手.pdf
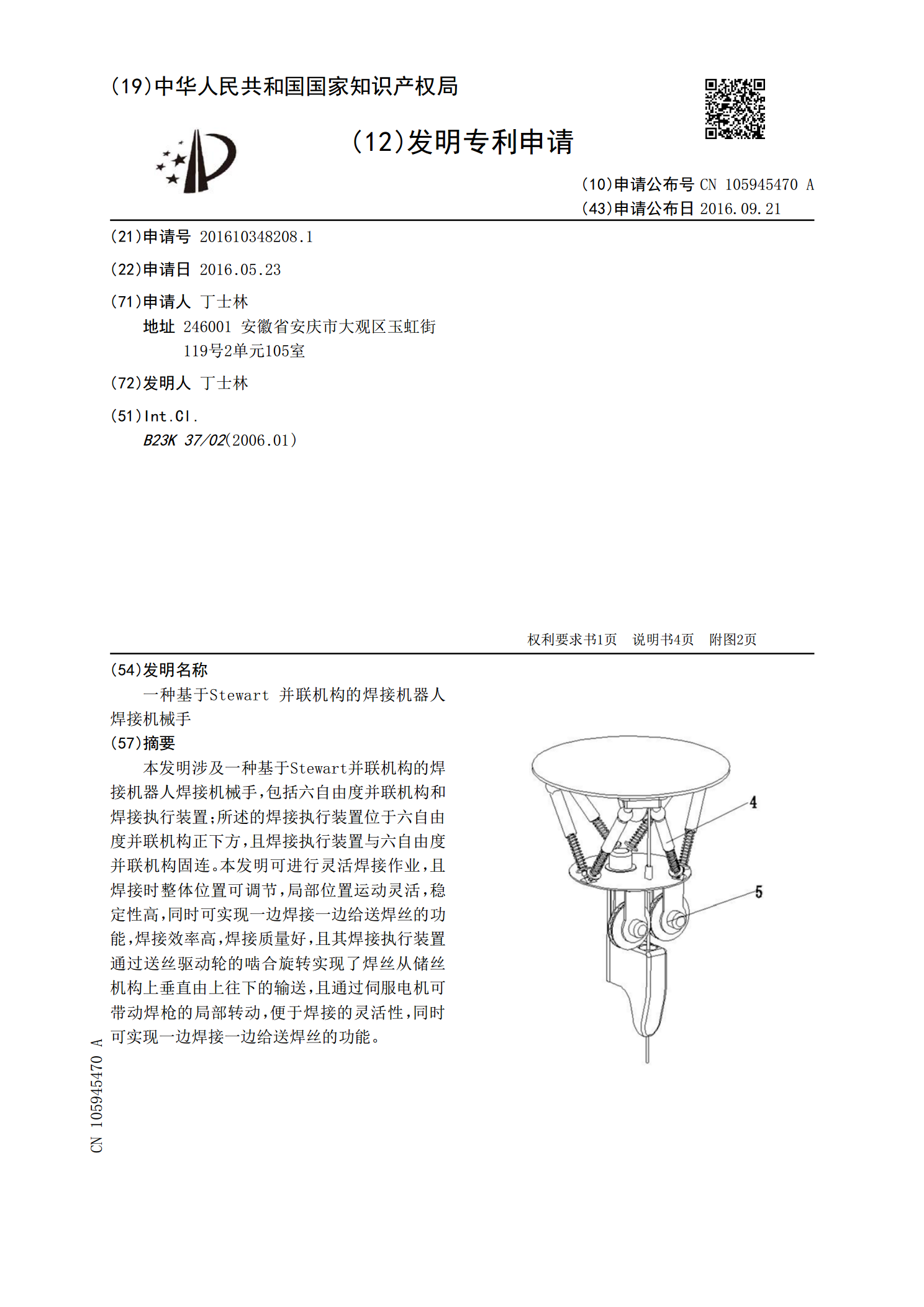
本发明涉及一种基于Stewart并联机构的焊接机器人焊接机械手,包括六自由度并联机构和焊接执行装置;所述的焊接执行装置位于六自由度并联机构正下方,且焊接执行装置与六自由度并联机构固连。本发明可进行灵活焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同时可实现一边焊接一边给送焊丝的功能,焊接效率高,焊接质量好,且其焊接执行装置通过送丝驱动轮的啮合旋转实现了焊丝从储丝机构上垂直由上往下的输送,且通过伺服电机可带动焊枪的局部转动,便于焊接的灵活性,同时可实现一边焊接一边给送焊丝的功能。
一种基于冗余驱动双并联机构的臀部按摩机器人.pdf
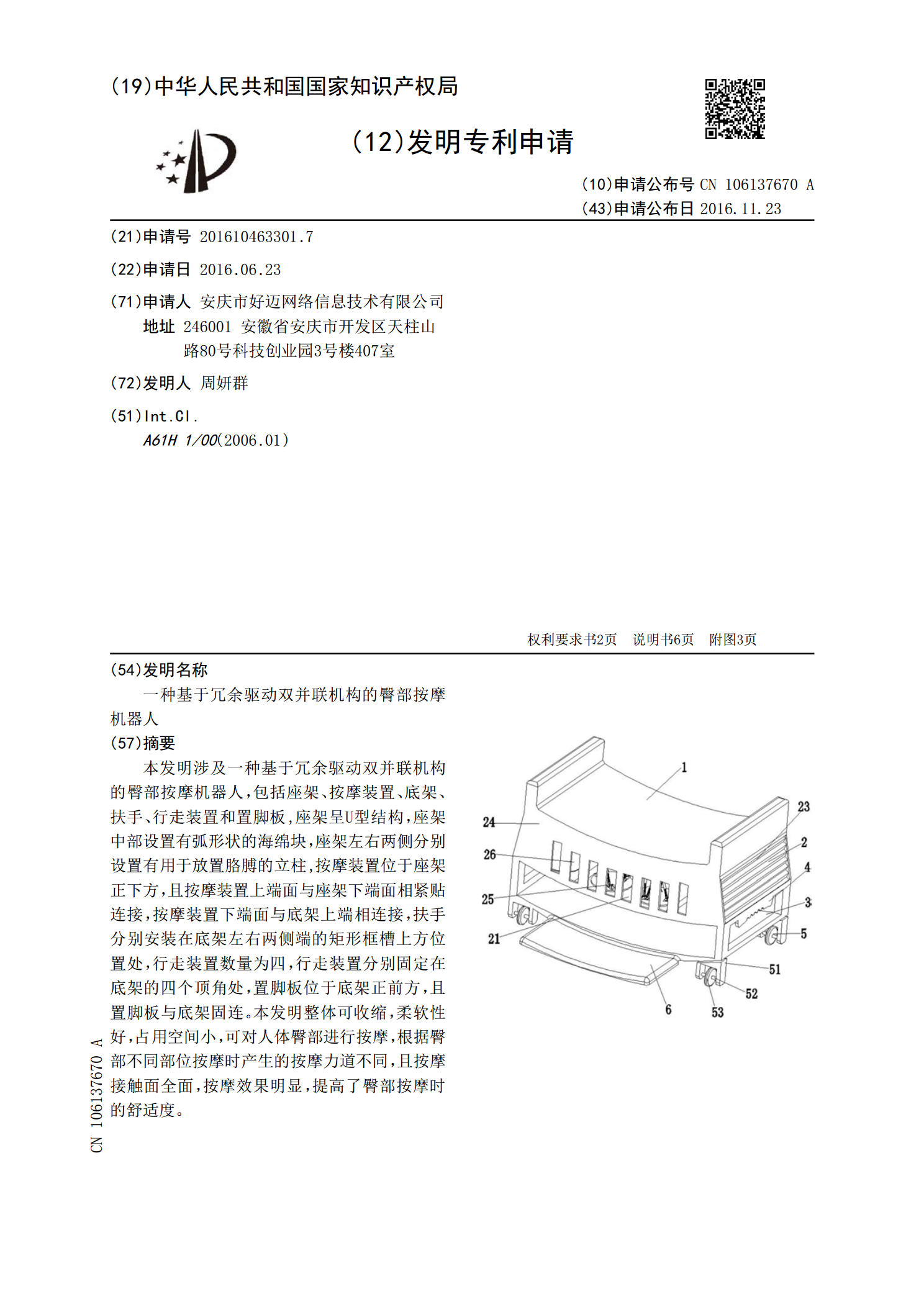
本发明涉及一种基于冗余驱动双并联机构的臀部按摩机器人,包括座架、按摩装置、底架、扶手、行走装置和置脚板,座架呈U型结构,座架中部设置有弧形状的海绵块,座架左右两侧分别设置有用于放置胳膊的立柱,按摩装置位于座架正下方,且按摩装置上端面与座架下端面相紧贴连接,按摩装置下端面与底架上端相连接,扶手分别安装在底架左右两侧端的矩形框槽上方位置处,行走装置数量为四,行走装置分别固定在底架的四个顶角处,置脚板位于底架正前方,且置脚板与底架固连。本发明整体可收缩,柔软性好,占用空间小,可对人体臀部进行按摩,根据臀部不同部

一种焊接机械手用的定位控制机构及其焊接机械手.pdf
本发明涉及自动焊接技术领域,具体涉及一种焊接机械手用的定位控制机构及其焊接机械手,本发明分别固定设置于小摇臂上的旋转控制电机以及升降控制电机,以及设置在小摇臂外侧的升降杆,该升降杆通过滑轨活动设置在小摇臂上,升降控制电机的动力输出轴接有升降调整齿轮,所述升降调整齿轮与升降杆上的齿状结构相互配合,所述升降杆通过旋转轴轴承接有旋转轴,所述旋转轴外侧活动套设有旋转控制件,所述旋转控制件的外侧面通过传动件与旋转控制电机的动力输出轴相连接。本发明将旋转控制电机设置在小摇臂上,减轻了定位控制机构的载重量,从而降低了升