
一种用于电动助力自行车的电机及其智能控制系统.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于电动助力自行车的电机及其智能控制系统.pdf
本发明公开了一种用于电动助力自行车的电机,包括踩踏驱动部分,所述踩踏驱动部分的卡基座(1)通过棘轮棘爪机构(2)单向驱动端盖(3)转动;所述卡基座(1)的内腔中嵌置有固定环(5),且固定环(5)内嵌置有若干个呈环状排列的磁钢(6),在电机轴(7)上设置有正对磁钢(6)设置的踩踏传感器(8),踩踏传感器(8)通过磁钢(5)的磁场变化能够实时感应到磁钢(6)的转动方向和转动速度。智能控制系统包括控制器(15)、电池(20)和电机(21),控制器(15)对采集自电机(21)内部的信息进行处理。本发明的电机及其智

一种用于电动助力自行车的电机智能控制系统.pdf
本发明公开了一种用于电动助力自行车的电机智能控制系统,包括电机(1)、控制器(2)和电池(10),其特征在于:所述的电机(1)内部设置有踩踏传感器(7);所述的控制器(2)包括单片机(3)、踩踏信号采集电路(4)和电机驱动电路(6),踩踏信号采集电路(4)能够通过踩踏传感器(7)实时获得用户踩踏的转动方向和转动速度并传递给单片机(3)处理获得用户踩踏的加速度;单片机(3)根据用户踩踏的加速度来控制PWM占空比输出并通过电机驱动电路(6)控制电机(1)的电机驱动部分(9)驱动电机轮毂的转速。本发明采集的信号

一种用于电动自行车的电动助力转向控制系统及其方法.pdf
本发明公开了一种用于电动自行车的电动助力转向控制系统及其方法。转向手把、转向输入轴与转矩传感器顺次相连,助力电机、电磁离合器、减速机构、转向输出轴、转向轮与车速传感器顺次相连;所述电子控制装置包括相连接的助力特性控制器和电流控制器,控制装置接收转矩传感器和车速传感器信号,通过控制助力电机及电磁离合器实施电动助力转向功能。本发明可以在电动自行车低速行驶时进行正向助力控制,中高速行驶时进行反向助力控制,根据电动自行车的运行工况改善其转向操纵稳定性和行驶安全性。特别是可以防止由于驾驶员施加的转向转矩过大或转向过
一种用于电动助力自行车的电机.pdf
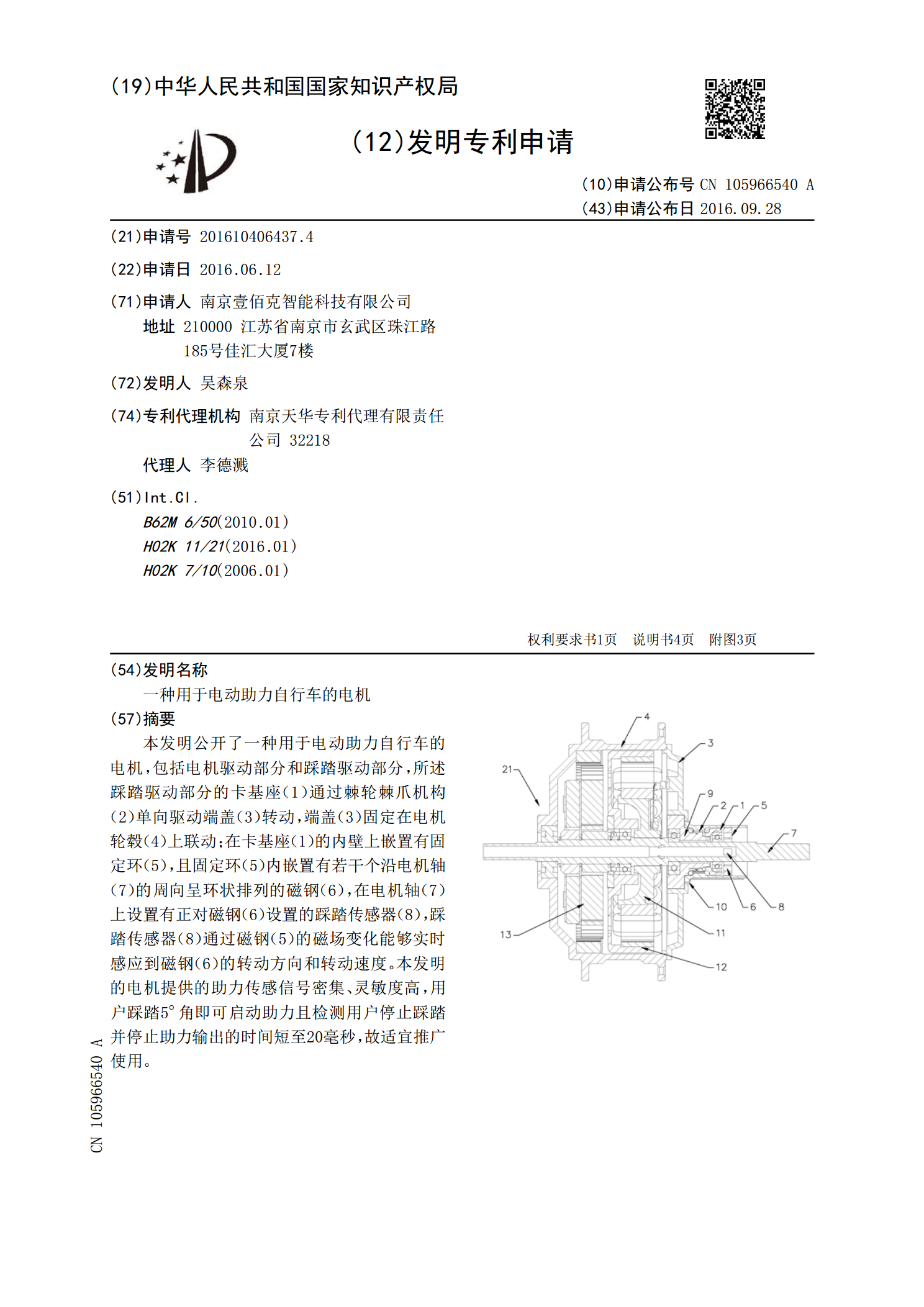
本发明公开了一种用于电动助力自行车的电机,包括电机驱动部分和踩踏驱动部分,所述踩踏驱动部分的卡基座(1)通过棘轮棘爪机构(2)单向驱动端盖(3)转动,端盖(3)固定在电机轮毂(4)上联动;在卡基座(1)的内壁上嵌置有固定环(5),且固定环(5)内嵌置有若干个沿电机轴(7)的周向呈环状排列的磁钢(6),在电机轴(7)上设置有正对磁钢(6)设置的踩踏传感器(8),踩踏传感器(8)通过磁钢(5)的磁场变化能够实时感应到磁钢(6)的转动方向和转动速度。本发明的电机提供的助力传感信号密集、灵敏度高,用户踩踏5°角即

一种山地电动助力自行车及其电动助力的方法.pdf
本发明公开了一种山地电动助力自行车,其特征在于包括:车体(1);安装在车体(1)上的电动助力装置(2),用于为车体(1)提供辅助驱动力;安装在车体(1)上的脚蹬力检测装置(3),用于检测脚蹬力矩,以产生相应的力矩信号;以及安装在车体(1)上的控制装置(4),用于接收所述力矩信号,生成与所述力矩信号相应的控制信号,以控制所述电动助力装置(2)提供与脚蹬力矩相适应的辅助驱动力。该电动助力自行车根据骑行者脚蹬力的大小来确定电机的输出功率,使得电机提供与脚蹬力相适应的辅助驱动力,电能利用率高,耗电少,安全适用。