
一种爬壁式探伤检测机器人.pdf

和裕****az

1/9

2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种爬壁式探伤检测机器人.pdf
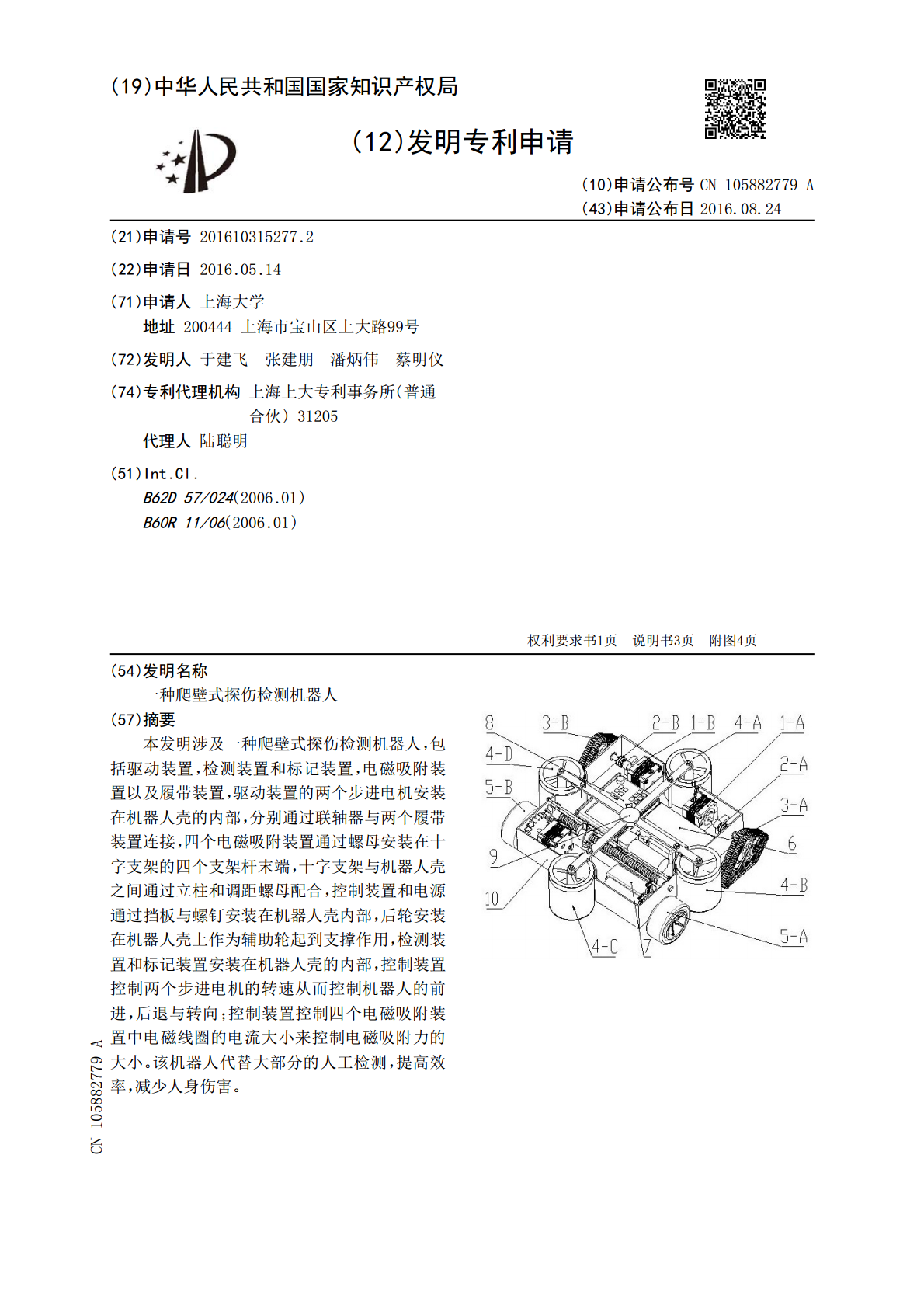
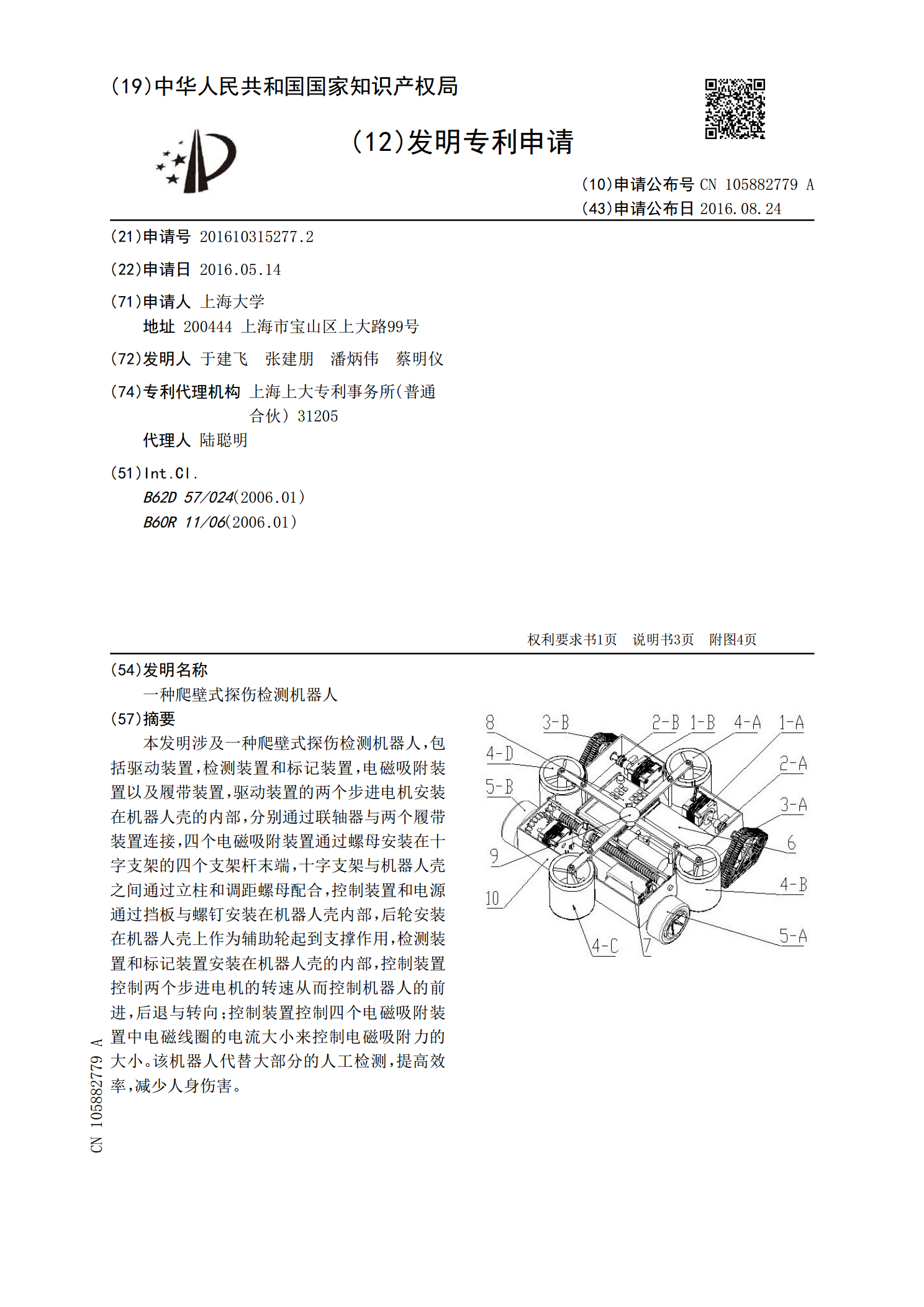
本发明涉及一种爬壁式探伤检测机器人,包括驱动装置,检测装置和标记装置,电磁吸附装置以及履带装置,驱动装置的两个步进电机安装在机器人壳的内部,分别通过联轴器与两个履带装置连接,四个电磁吸附装置通过螺母安装在十字支架的四个支架杆末端,十字支架与机器人壳之间通过立柱和调距螺母配合,控制装置和电源通过挡板与螺钉安装在机器人壳内部,后轮安装在机器人壳上作为辅助轮起到支撑作用,检测装置和标记装置安装在机器人壳的内部,控制装置控制两个步进电机的转速从而控制机器人的前进,后退与转向;控制装置控制四个电磁吸附装置中电磁线圈

一种TOFD探伤爬壁机器人.pdf
本发明属于特种工业机器人技术领域,涉及一种TOFD探伤爬壁机器人,包括电气部件、爬行部件和探伤部件,电气部件设置在一安装板一侧,爬行部件和探伤部件设置在安装板另一侧,探伤部件能沿平行于安装板的板面进行直线运动;爬行部件包括能吸附于爬行面的吸附体和爬行轮,爬行轮突出于吸附体的吸附表面;本发明能实现TOFD探伤机器人沿着球罐、管壁等曲面进行爬行检测焊接缺陷,且机器人的越障能力强,检测过程机器人定位稳定可靠,提高检测精度,同时还减少人工检测带来的危险,提高检测机器人的环境适应性,扩大检测范围,实现智能化的高标准

一种用于磁粉探伤检测的爬壁机器人.pdf
一种用于磁粉探伤检测的爬壁机器人,包括行动装置、喷磁装置、磁化装置、打标装置;在机架上安装有减震结构的磁吸附轮;四个E型探头通过柔性连接头与偏心凸轮驱动装置连接;打标装置包括推拉型电磁铁,在电磁铁的底部安装有标记印章。这种爬壁机器人可以牢固地吸附于罐体壁面,磁探头通过弹性连接可以有效地提高避障能力,完全可以替代目前的人工作业,提高探伤效率、降低人身伤害。

磁粉探伤爬壁检测机器人的设计与研究.docx
磁粉探伤爬壁检测机器人的设计与研究磁粉探伤爬壁检测机器人的设计与研究一、引言磁粉探伤技术是一种广泛应用于工业领域的无损检测技术。该技术通过利用磁性探伤剂在磁场作用下检测材料表面或材料内部的缺陷和裂纹。目前,钢结构、航空航天、电力设备、压力容器、铁路轨道等领域都广泛应用了磁粉探伤技术。由于磁粉探伤技术的检测精度和高效性,更加需要高精度、高效率的机器人技术进行磁粉探伤。本篇论文主要探讨磁粉探伤爬壁检测机器人的设计与研究。二、爬壁机器人分类爬壁机器人的分类有多种方式,本文主要从传动方式和机器人结构类型两个维度来
磁粉探伤检测爬壁机器人的磁化装置.pdf
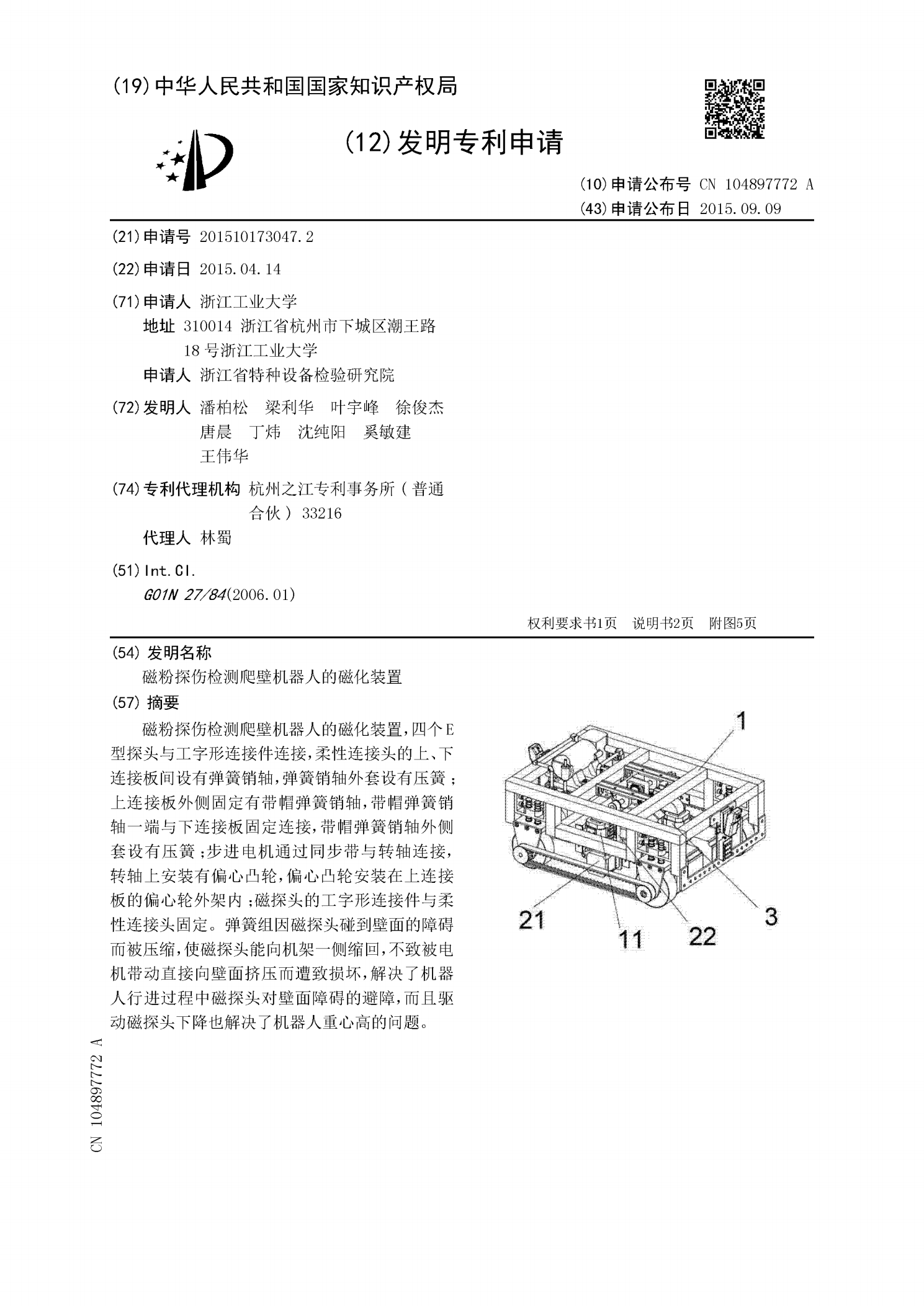
磁粉探伤检测爬壁机器人的磁化装置,四个E型探头与工字形连接件连接,柔性连接头的上、下连接板间设有弹簧销轴,弹簧销轴外套设有压簧;上连接板外侧固定有带帽弹簧销轴,带帽弹簧销轴一端与下连接板固定连接,带帽弹簧销轴外侧套设有压簧;步进电机通过同步带与转轴连接,转轴上安装有偏心凸轮,偏心凸轮安装在上连接板的偏心轮外架内;磁探头的工字形连接件与柔性连接头固定。弹簧组因磁探头碰到壁面的障碍而被压缩,使磁探头能向机架一侧缩回,不致被电机带动直接向壁面挤压而遭致损坏,解决了机器人行进过程中磁探头对壁面障碍的避障,而且驱动