
磁粉探伤爬壁检测机器人的设计与研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁粉探伤爬壁检测机器人的设计与研究.docx
磁粉探伤爬壁检测机器人的设计与研究磁粉探伤爬壁检测机器人的设计与研究一、引言磁粉探伤技术是一种广泛应用于工业领域的无损检测技术。该技术通过利用磁性探伤剂在磁场作用下检测材料表面或材料内部的缺陷和裂纹。目前,钢结构、航空航天、电力设备、压力容器、铁路轨道等领域都广泛应用了磁粉探伤技术。由于磁粉探伤技术的检测精度和高效性,更加需要高精度、高效率的机器人技术进行磁粉探伤。本篇论文主要探讨磁粉探伤爬壁检测机器人的设计与研究。二、爬壁机器人分类爬壁机器人的分类有多种方式,本文主要从传动方式和机器人结构类型两个维度来

磁粉探伤爬壁检测机器人的设计与研究的开题报告.docx
磁粉探伤爬壁检测机器人的设计与研究的开题报告一、研究背景在工业生产中,磁粉探伤是一种有效的材料检测方法,通常用于检测金属材料的裂纹、疲劳损伤等缺陷。然而,对于某些特殊结构,如高空或高温环境下的管道和储罐,人工磁粉探伤显然存在许多困难和危险。因此,为了提高人工检测的效率和安全性,研究磁粉探伤爬壁检测机器人是非常必要和迫切的。二、研究目的与意义本研究旨在设计一种能够在高空或高温环境下进行磁粉探伤的爬壁机器人系统。该系统应具有以下特点:1.具备爬壁功能,能够在垂直表面爬行。2.能够进行磁粉探伤,并能够输出具体的

磁粉探伤爬壁检测机器人的设计与研究的中期报告.docx
磁粉探伤爬壁检测机器人的设计与研究的中期报告一、课题研究背景和意义随着科学技术的不断发展和对工业设备运行安全性能的要求不断提高,对于各种自动化机器人技术的应用不断扩展,并且在其中尤以磁粉探伤技术的应用居多,因为它已经成为了一种非常有效的材料无损探测方法,在航空、石油、化工等领域都有广泛的应用。尤其是在各类管道和储罐的内磁探工作中,无需拆卸设备,即可进行对它们的检测工作,从而能很好地预防可能的事故和灾难。但是,传统的人工磁探工作也会受到许多限制,如设备结构复杂、易受环境影响等等的问题,这时就需要一种可以自动
磁粉探伤检测爬壁机器人的磁化装置.pdf
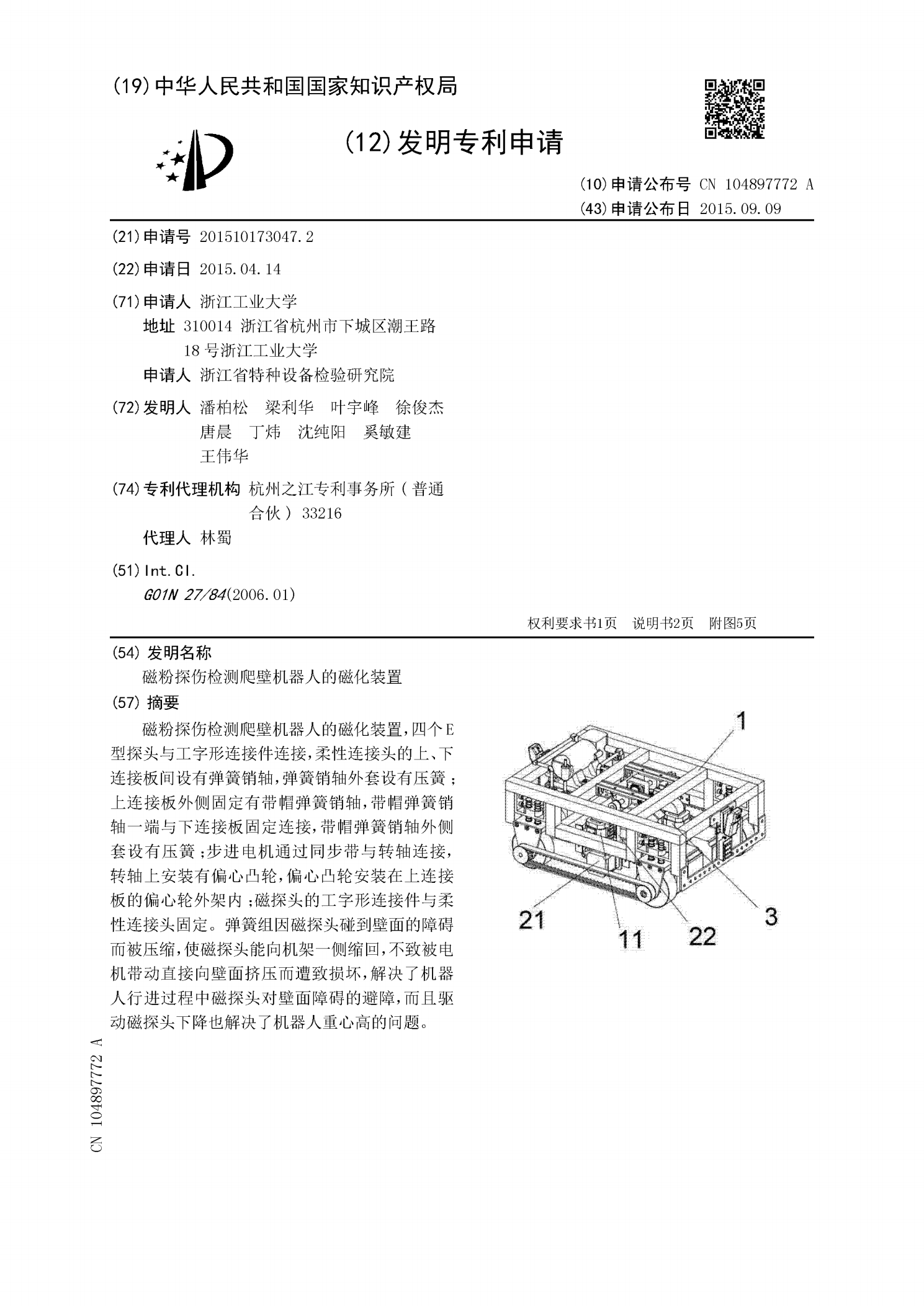
磁粉探伤检测爬壁机器人的磁化装置,四个E型探头与工字形连接件连接,柔性连接头的上、下连接板间设有弹簧销轴,弹簧销轴外套设有压簧;上连接板外侧固定有带帽弹簧销轴,带帽弹簧销轴一端与下连接板固定连接,带帽弹簧销轴外侧套设有压簧;步进电机通过同步带与转轴连接,转轴上安装有偏心凸轮,偏心凸轮安装在上连接板的偏心轮外架内;磁探头的工字形连接件与柔性连接头固定。弹簧组因磁探头碰到壁面的障碍而被压缩,使磁探头能向机架一侧缩回,不致被电机带动直接向壁面挤压而遭致损坏,解决了机器人行进过程中磁探头对壁面障碍的避障,而且驱动

一种用于磁粉探伤检测的爬壁机器人.pdf
一种用于磁粉探伤检测的爬壁机器人,包括行动装置、喷磁装置、磁化装置、打标装置;在机架上安装有减震结构的磁吸附轮;四个E型探头通过柔性连接头与偏心凸轮驱动装置连接;打标装置包括推拉型电磁铁,在电磁铁的底部安装有标记印章。这种爬壁机器人可以牢固地吸附于罐体壁面,磁探头通过弹性连接可以有效地提高避障能力,完全可以替代目前的人工作业,提高探伤效率、降低人身伤害。