
球形机器人驱动机构.pdf

一吃****仪凡

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
球形机器人驱动机构.pdf
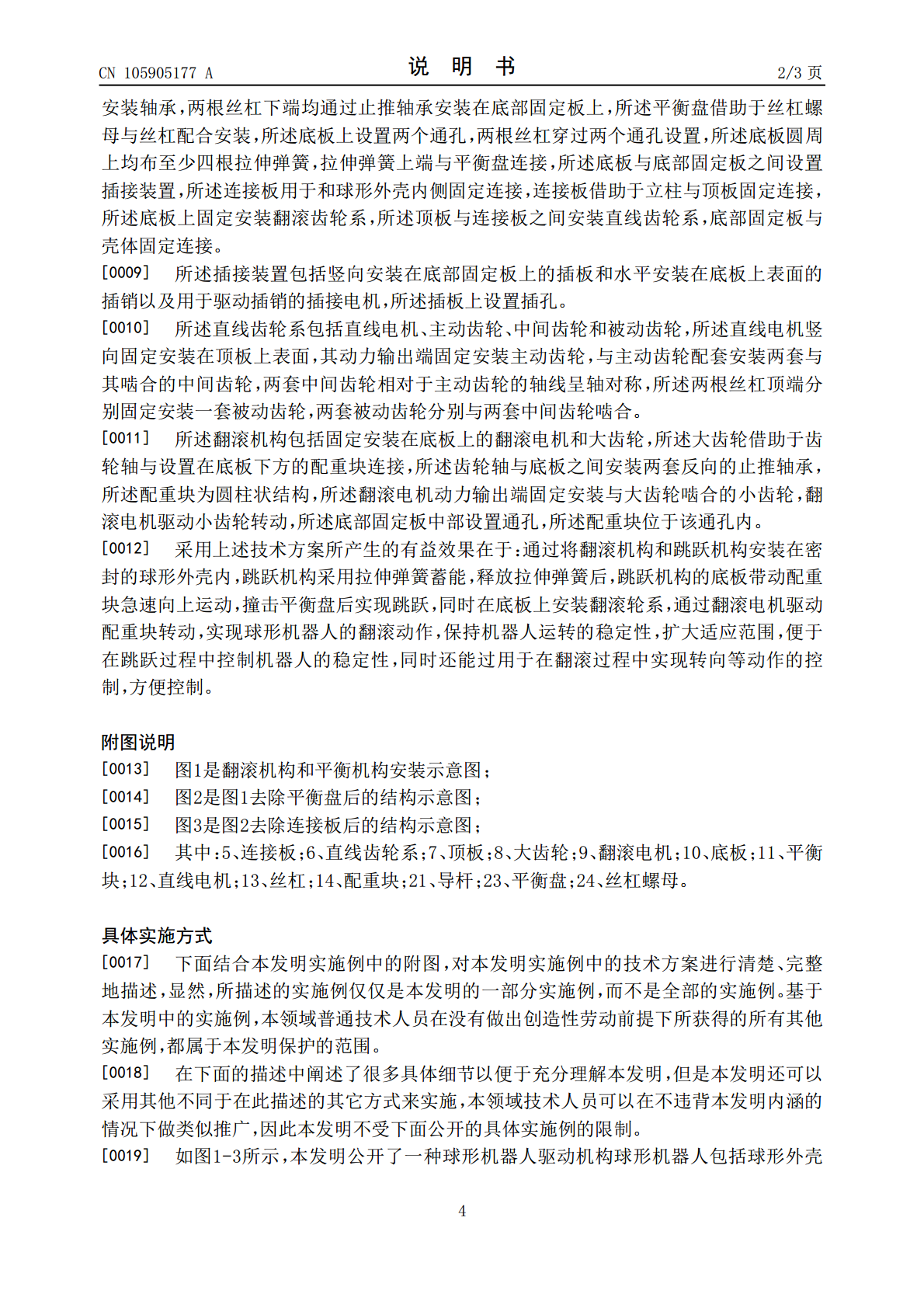
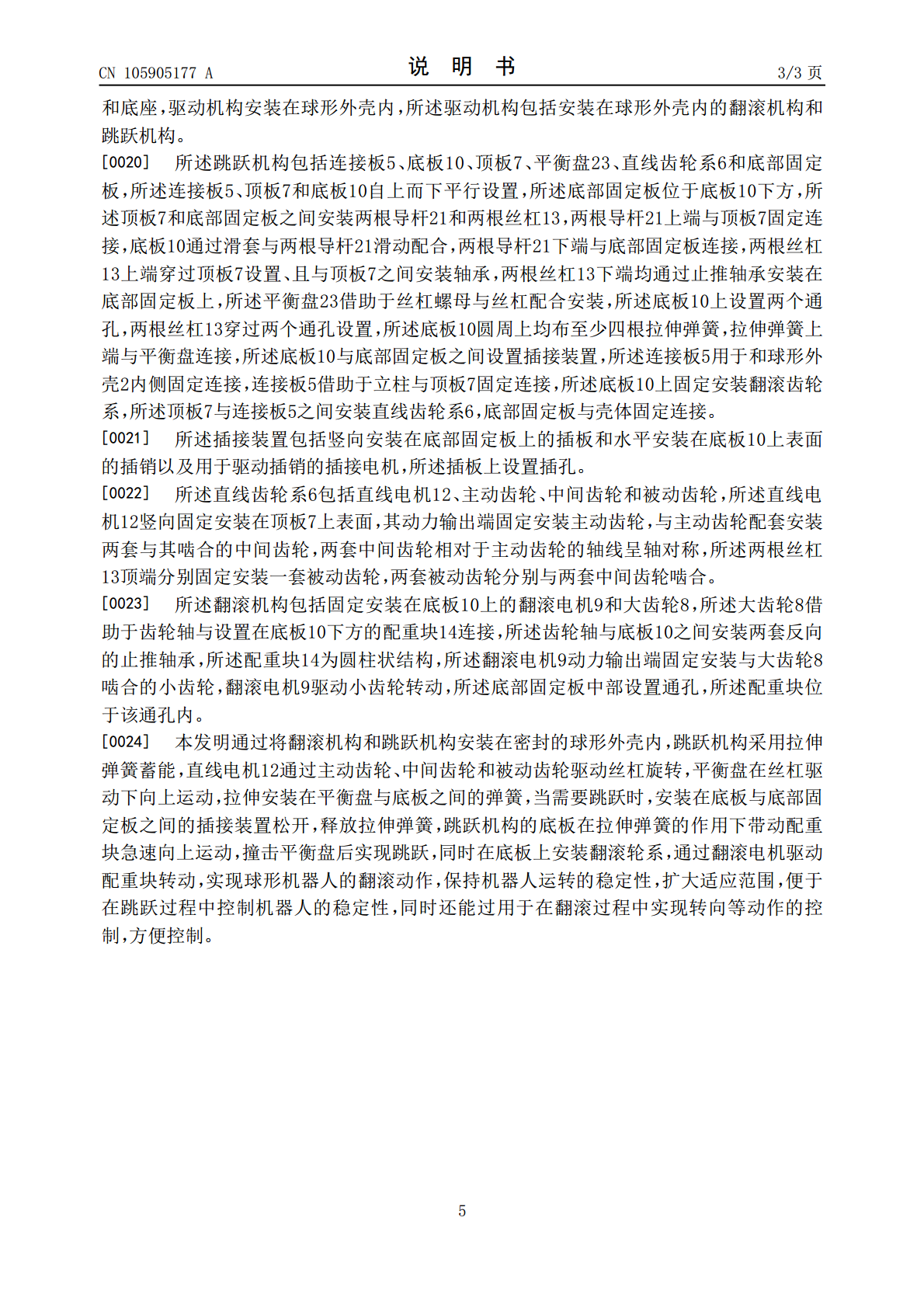
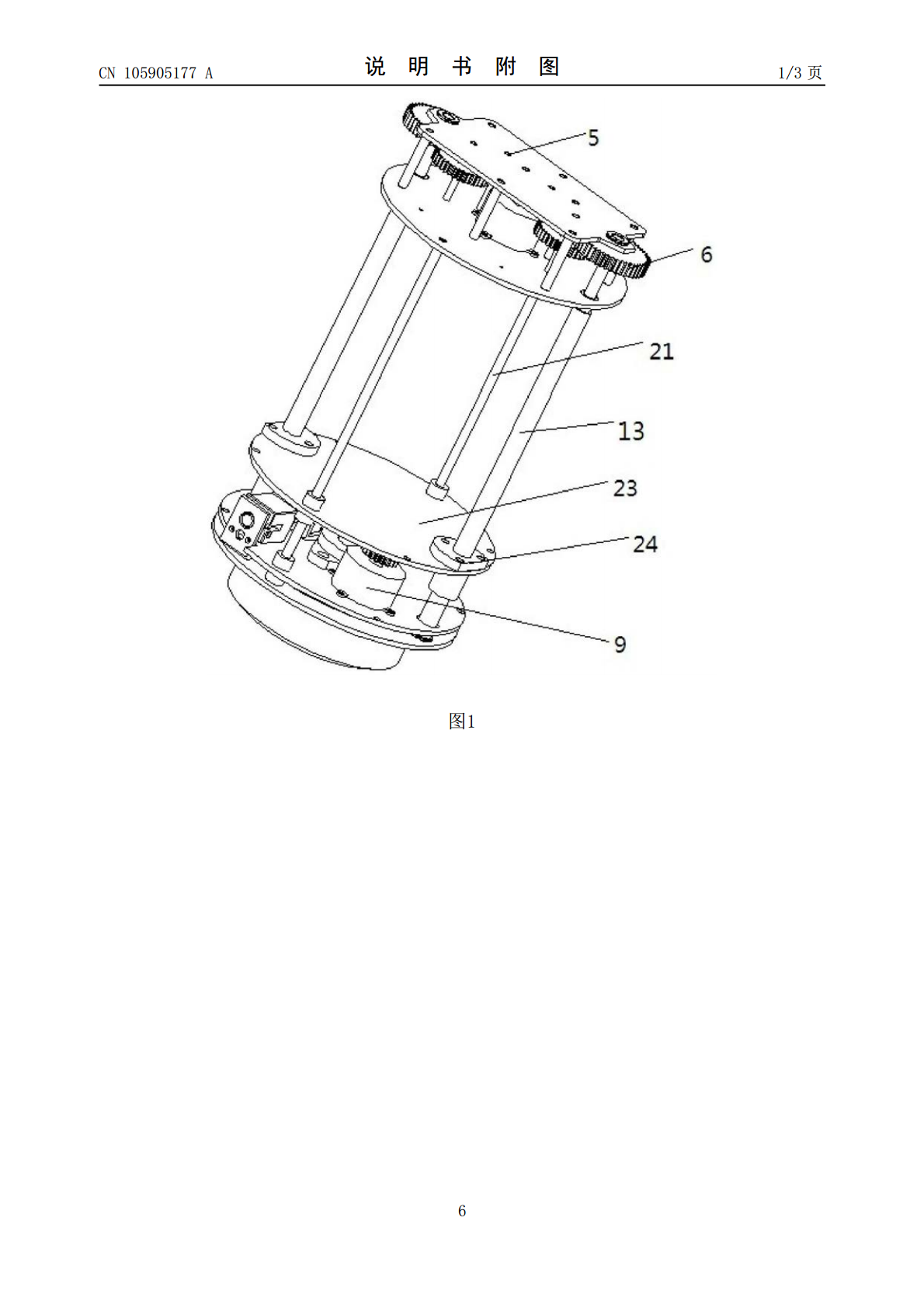
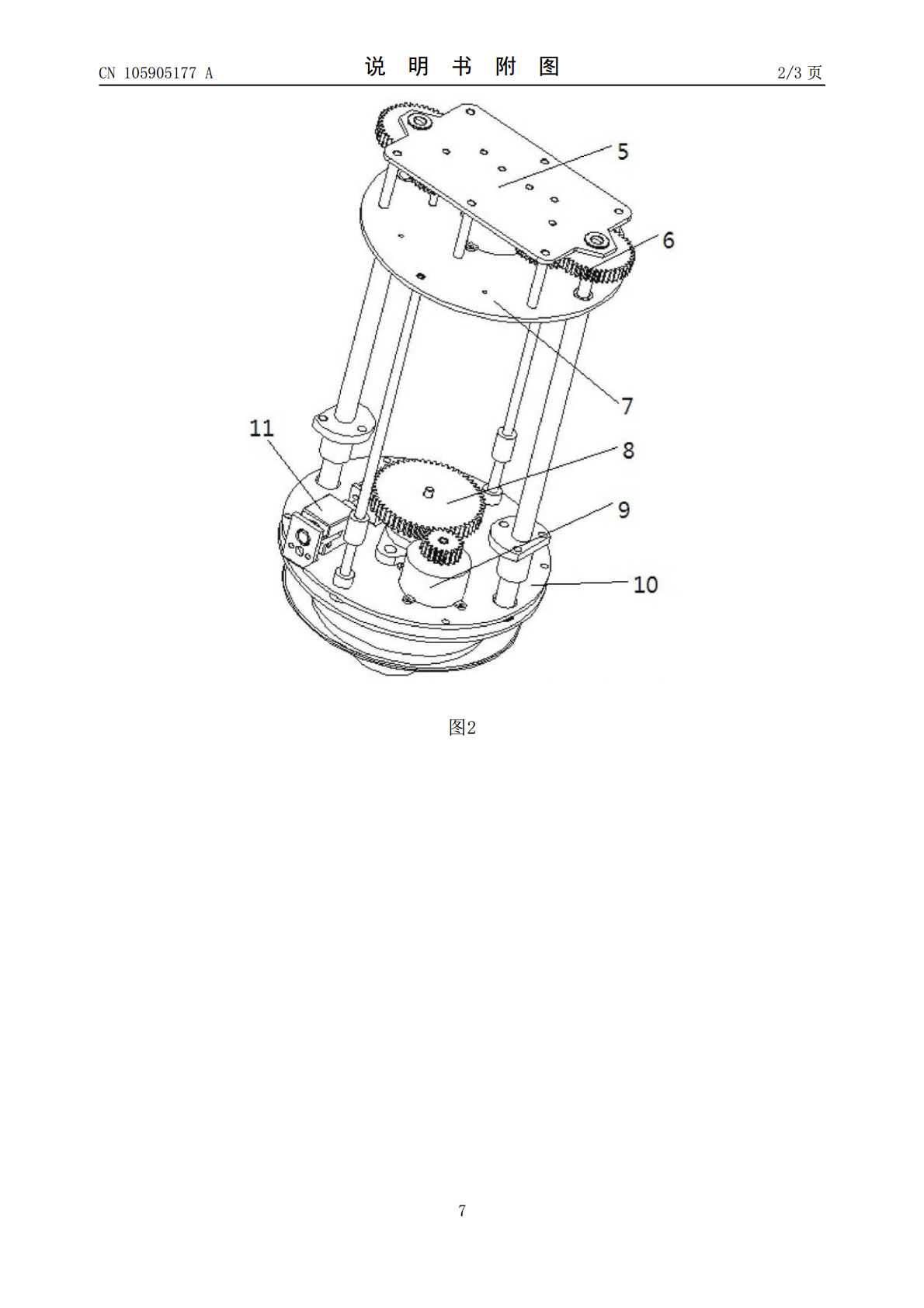
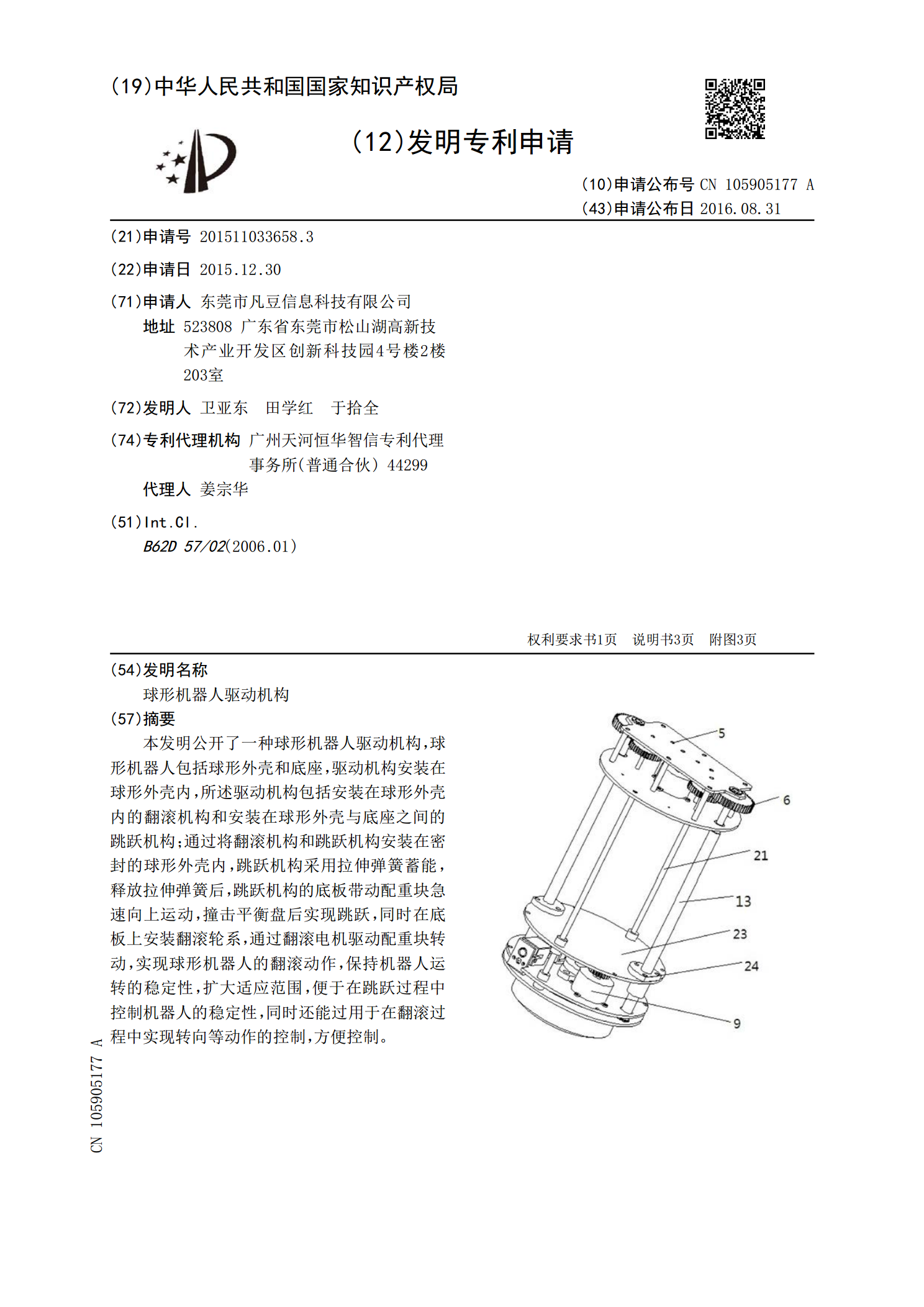
本发明公开了一种球形机器人驱动机构,球形机器人包括球形外壳和底座,驱动机构安装在球形外壳内,所述驱动机构包括安装在球形外壳内的翻滚机构和安装在球形外壳与底座之间的跳跃机构;通过将翻滚机构和跳跃机构安装在密封的球形外壳内,跳跃机构采用拉伸弹簧蓄能,释放拉伸弹簧后,跳跃机构的底板带动配重块急速向上运动,撞击平衡盘后实现跳跃,同时在底板上安装翻滚轮系,通过翻滚电机驱动配重块转动,实现球形机器人的翻滚动作,保持机器人运转的稳定性,扩大适应范围,便于在跳跃过程中控制机器人的稳定性,同时还能过用于在翻滚过程中实现转向

基于球形空间的欠驱动机器人手腕机构.pdf
本发明涉及一种基于球形空间的欠驱动机器人手腕机构。它包括,一个执行连接体和一个臂架,所述执行连接体有一个球形空腔,在该球形空腔中心处有上下两片可调圆板通过螺栓与臂架固定连接;三个动力架可根据需要固定在可调圆板中不同的螺栓孔中,该三个动力架中的两个动力架端部各装有一个动力源,动力源经一个牙嵌式离合器连接一根滚轮轴,滚轮轴上各装一个滚轮,该滚轮与执行连接体球形空腔的内壁滚动接触;另一个动力架端部直接装有一个滚轮且与执行连接体球形空腔的内壁滚动接触。因为本基于球形空间的欠驱动机器人手腕机构的滚轮和执行连接体是纯
摩擦式内驱动全方位球形机器人机构.pdf
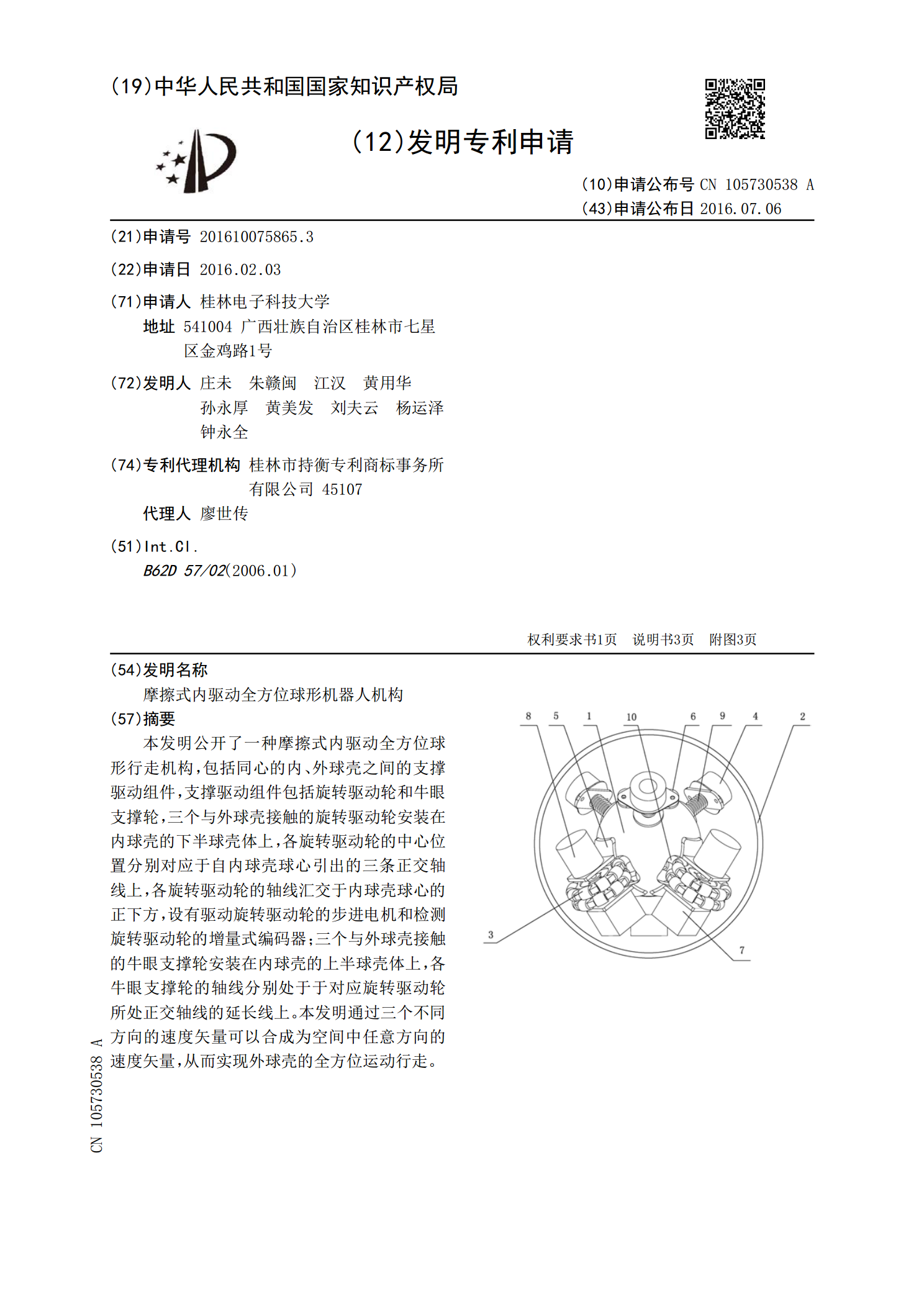
本发明公开了一种摩擦式内驱动全方位球形行走机构,包括同心的内、外球壳之间的支撑驱动组件,支撑驱动组件包括旋转驱动轮和牛眼支撑轮,三个与外球壳接触的旋转驱动轮安装在内球壳的下半球壳体上,各旋转驱动轮的中心位置分别对应于自内球壳球心引出的三条正交轴线上,各旋转驱动轮的轴线汇交于内球壳球心的正下方,设有驱动旋转驱动轮的步进电机和检测旋转驱动轮的增量式编码器;三个与外球壳接触的牛眼支撑轮安装在内球壳的上半球壳体上,各牛眼支撑轮的轴线分别处于于对应旋转驱动轮所处正交轴线的延长线上。本发明通过三个不同方向的速度矢量可

全向轮驱动球形机器人的机构分析与研究的开题报告.docx
全向轮驱动球形机器人的机构分析与研究的开题报告一、选题依据随着机器人技术的不断发展,机器人已经逐渐成为人们生产、生活中不可或缺的一部分。全向轮驱动球形机器人作为机器人中的一种重要类型,具有机动灵活、多功能、高效率等特点,被广泛应用于工厂自动化、危险环境检测、医疗卫生等领域。全向轮驱动球形机器人在行动时能够灵活、稳定地前进,有相当的支援能力。该机器人采用四个全向轮来实现多向移动和转向,可在水平方向上自由移动,且不需方向变换,在移动过程中可以实现自由转向以适应各种场地条件。因此,如何掌握全向轮驱动球形机器人的

三驱动球形机器人.pdf
本发明提供一种三驱动球形机器人,其包括一球壳,其中通过球心对称地设置两根传动轴,传动轴的一端与球壳内壁固联;一差速传动机构中的一框架可转动地固设在两根传动轴相邻的轴端部上,两个锥齿轮可转动地分别固设在所述传动轴上且通过传动机构分别与一电机连接;框体上设置一配重连接轴,其通过球心与两根传动轴垂直,在该配重连接轴上一体固设一锥齿轮,其置于前述两个锥齿轮之间且与其啮合;在所述配重连接轴上分别一体固联和套设固定两摆杆、摆杆上联配重体,套设的摆杆通过传动机构连接一配重电机。本三驱动球形机器人,通过使用差速传动机构,