
一种机器人智能滚压包边系统及方法.pdf

An****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人智能滚压包边系统及方法.pdf
本发明公开了一种机器人智能滚压包边系统及方法,包括机器人A、机器人B、上件台、工作台、下件台,还设有安全围栏及主控柜电源柜等;机器人A、B分别安装有滚轮系统,机器人A还通过工具自动切换装置连接有工件定位抓手;工作台包括工作台支架、胎膜装置,胎膜装置上设有真空板,还设有滚压导向定位系统,包括抓手锁紧机构和外板导向装置,外板导向装置分组动作进行工件外板定位。本发明具有高精度的优点,对工件形状具有较大的灵活性,工件搬运过程避免多次装夹引入的设置误差,缩短加工时间,提高了工作效率及包边质量,系统自动检测控制加工过

一种机器人智能滚压包边系统的滚轮系统.pdf
本发明公开了一种机器人智能滚压包边系统的滚轮系统,包括机器人连接法兰,机器人连接法兰下端面连接有主轴,主轴末端装有滚头,滚头装有若干滚轮,主轴内部装有压力传感器和驱动弹簧,压力传感器检查监控驱动弹簧的压力,驱动弹簧连接滚头,直接反应滚头作用于工件的工作压力,保证滚压包边质量。滚头除常规滚轮外还装有包边角刀,可对汽车内外板滚压中尖角部进行压边。本发明当滚轮压在车件上后,对压缩弹性件造成挤压,进而使压缩弹性件对滚头产生压力,只需控制好压缩弹性件的形变量大小即可使滚边工作部分达到实际所需的滚压力,从而保证滚边质
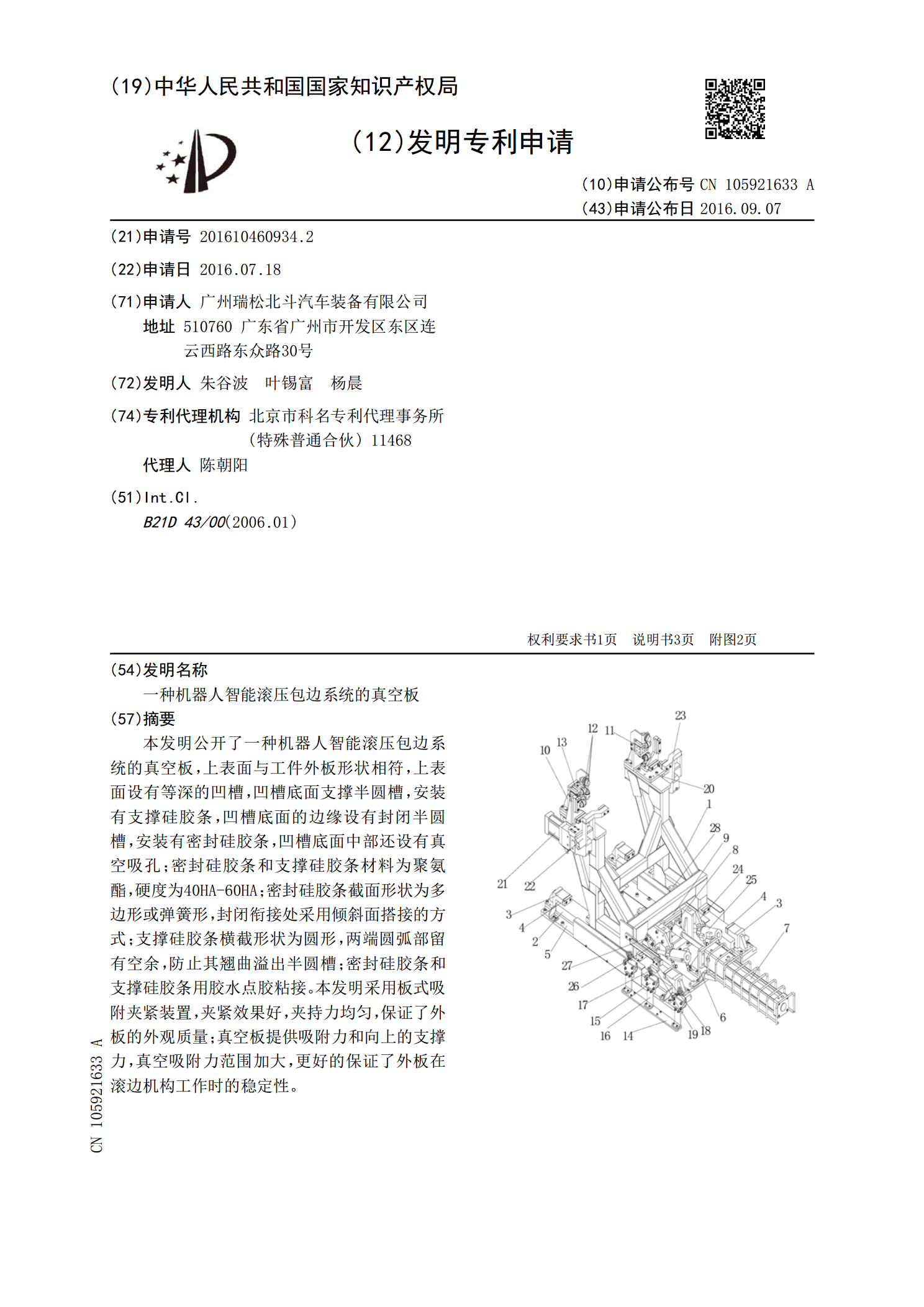
一种机器人智能滚压包边系统的真空板.pdf
本发明公开了一种机器人智能滚压包边系统的真空板,上表面与工件外板形状相符,上表面设有等深的凹槽,凹槽底面支撑半圆槽,安装有支撑硅胶条,凹槽底面的边缘设有封闭半圆槽,安装有密封硅胶条,凹槽底面中部还设有真空吸孔;密封硅胶条和支撑硅胶条材料为聚氨酯,硬度为40HA‑60HA;密封硅胶条截面形状为多边形或弹簧形,封闭衔接处采用倾斜面搭接的方式;支撑硅胶条横截形状为圆形,两端圆弧部留有空余,防止其翘曲溢出半圆槽;密封硅胶条和支撑硅胶条用胶水点胶粘接。本发明采用板式吸附夹紧装置,夹紧效果好,夹持力均匀,保证了外板的
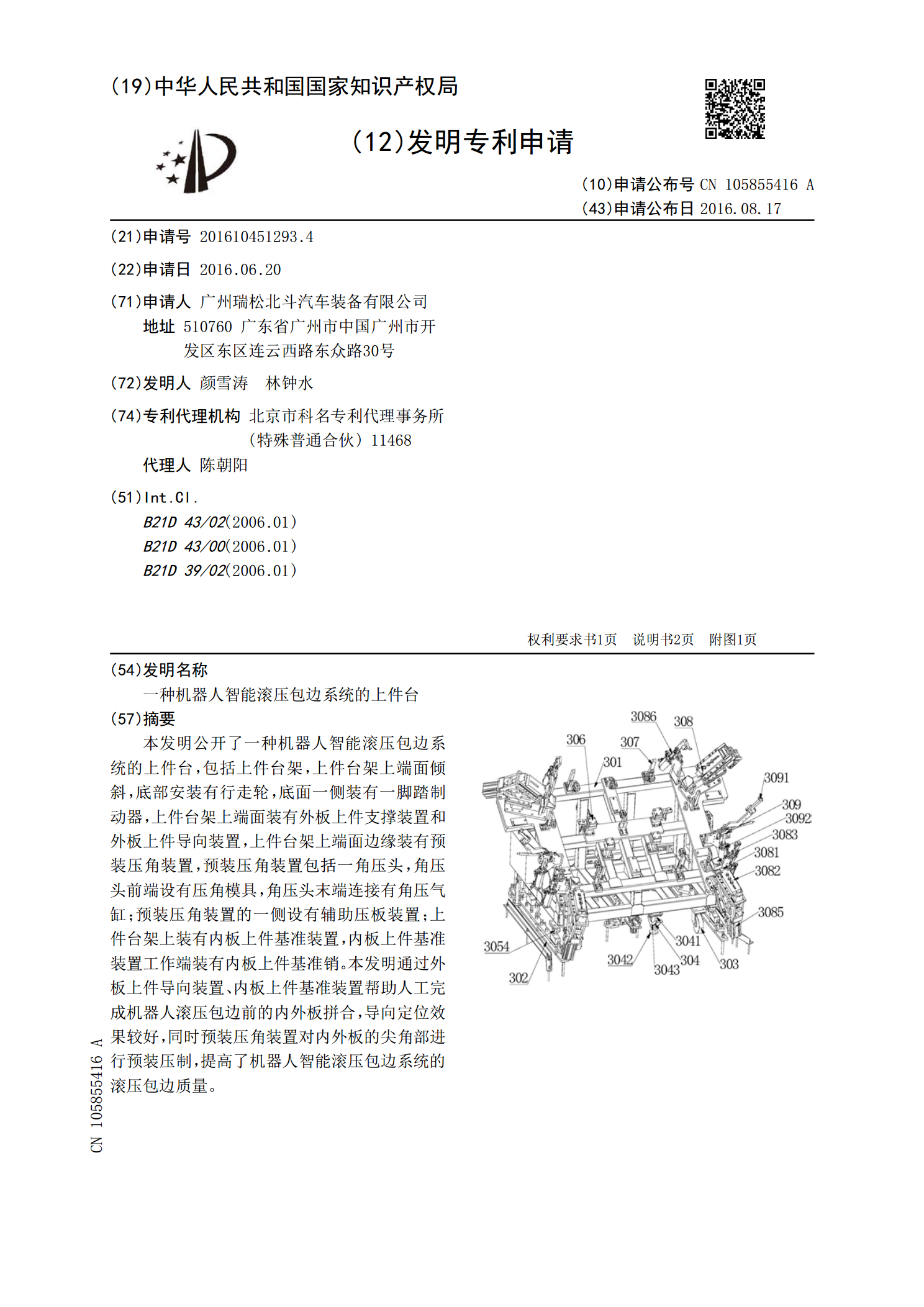
一种机器人智能滚压包边系统的上件台.pdf
本发明公开了一种机器人智能滚压包边系统的上件台,包括上件台架,上件台架上端面倾斜,底部安装有行走轮,底面一侧装有一脚踏制动器,上件台架上端面装有外板上件支撑装置和外板上件导向装置,上件台架上端面边缘装有预装压角装置,预装压角装置包括一角压头,角压头前端设有压角模具,角压头末端连接有角压气缸;预装压角装置的一侧设有辅助压板装置;上件台架上装有内板上件基准装置,内板上件基准装置工作端装有内板上件基准销。本发明通过外板上件导向装置、内板上件基准装置帮助人工完成机器人滚压包边前的内外板拼合,导向定位效果较好,同时
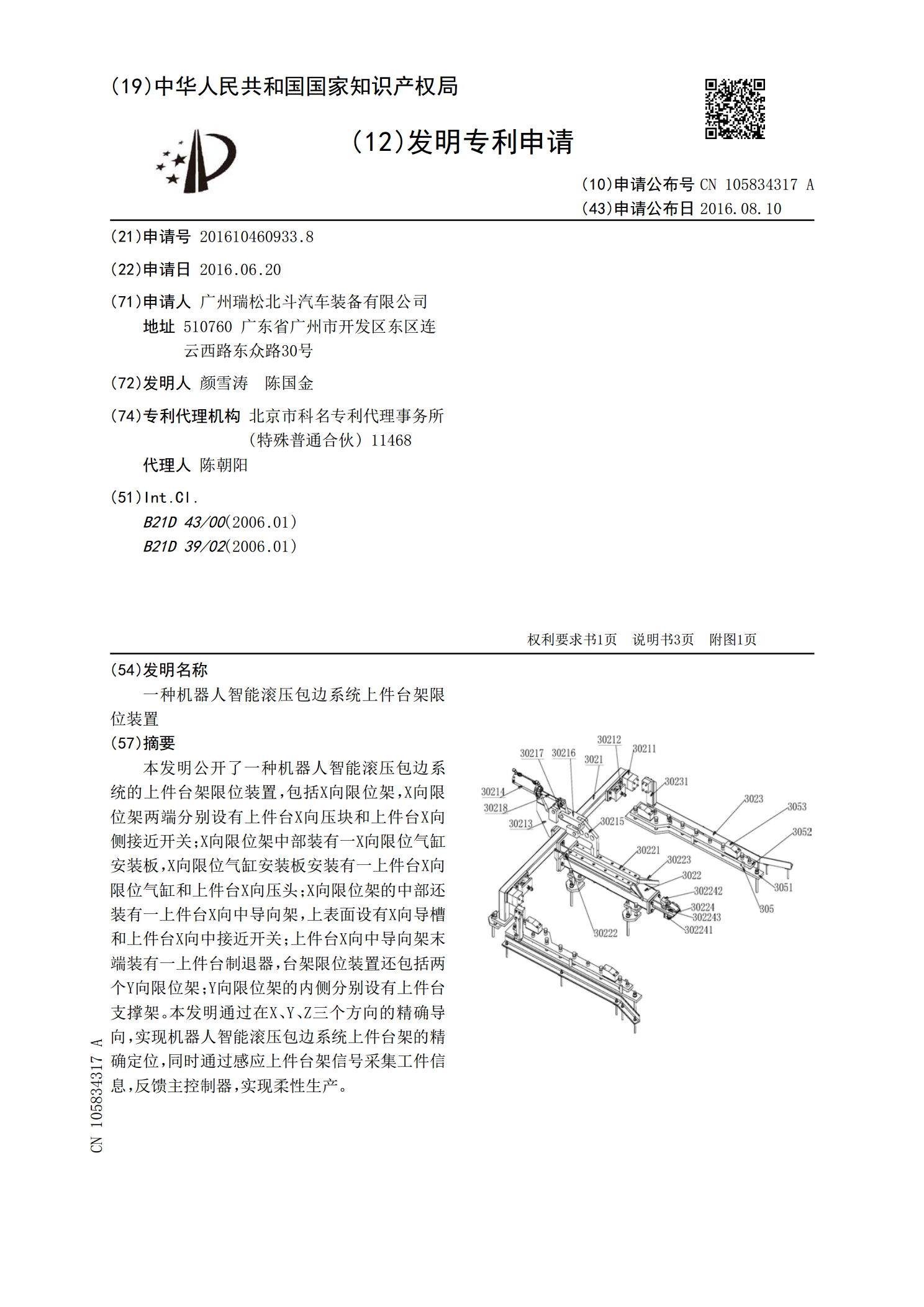
一种机器人智能滚压包边系统上件台架限位装置.pdf
本发明公开了一种机器人智能滚压包边系统的上件台架限位装置,包括X向限位架,X向限位架两端分别设有上件台X向压块和上件台X向侧接近开关;X向限位架中部装有一X向限位气缸安装板,X向限位气缸安装板安装有一上件台X向限位气缸和上件台X向压头;X向限位架的中部还装有一上件台X向中导向架,上表面设有X向导槽和上件台X向中接近开关;上件台X向中导向架末端装有一上件台制退器,台架限位装置还包括两个Y向限位架;Y向限位架的内侧分别设有上件台支撑架。本发明通过在X、Y、Z三个方向的精确导向,实现机器人智能滚压包边系统上件台