
一种多工位冷镦成型机的夹持机械手机构.pdf

静芙****可爱

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多工位冷镦成型机的夹持机械手机构.pdf
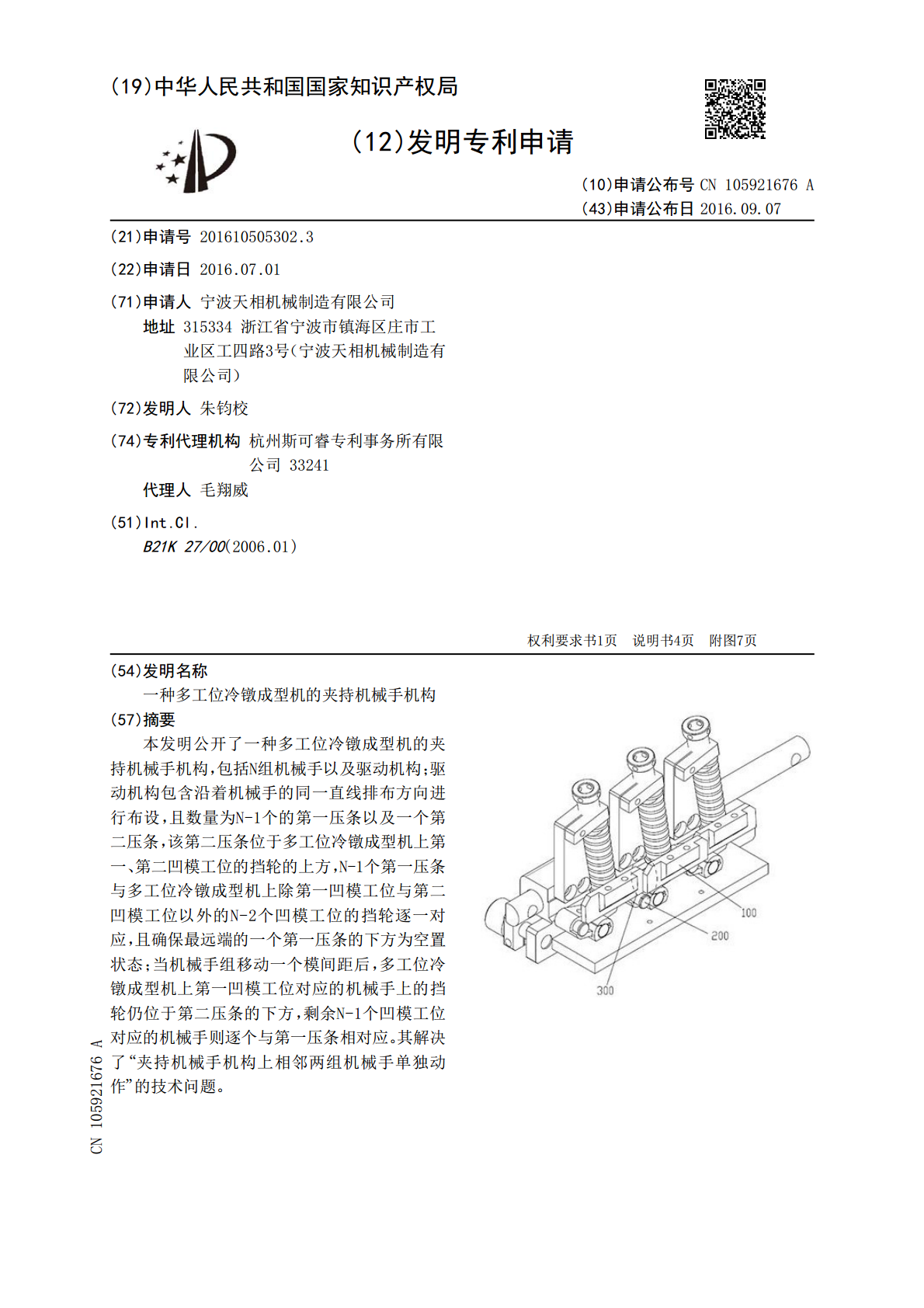
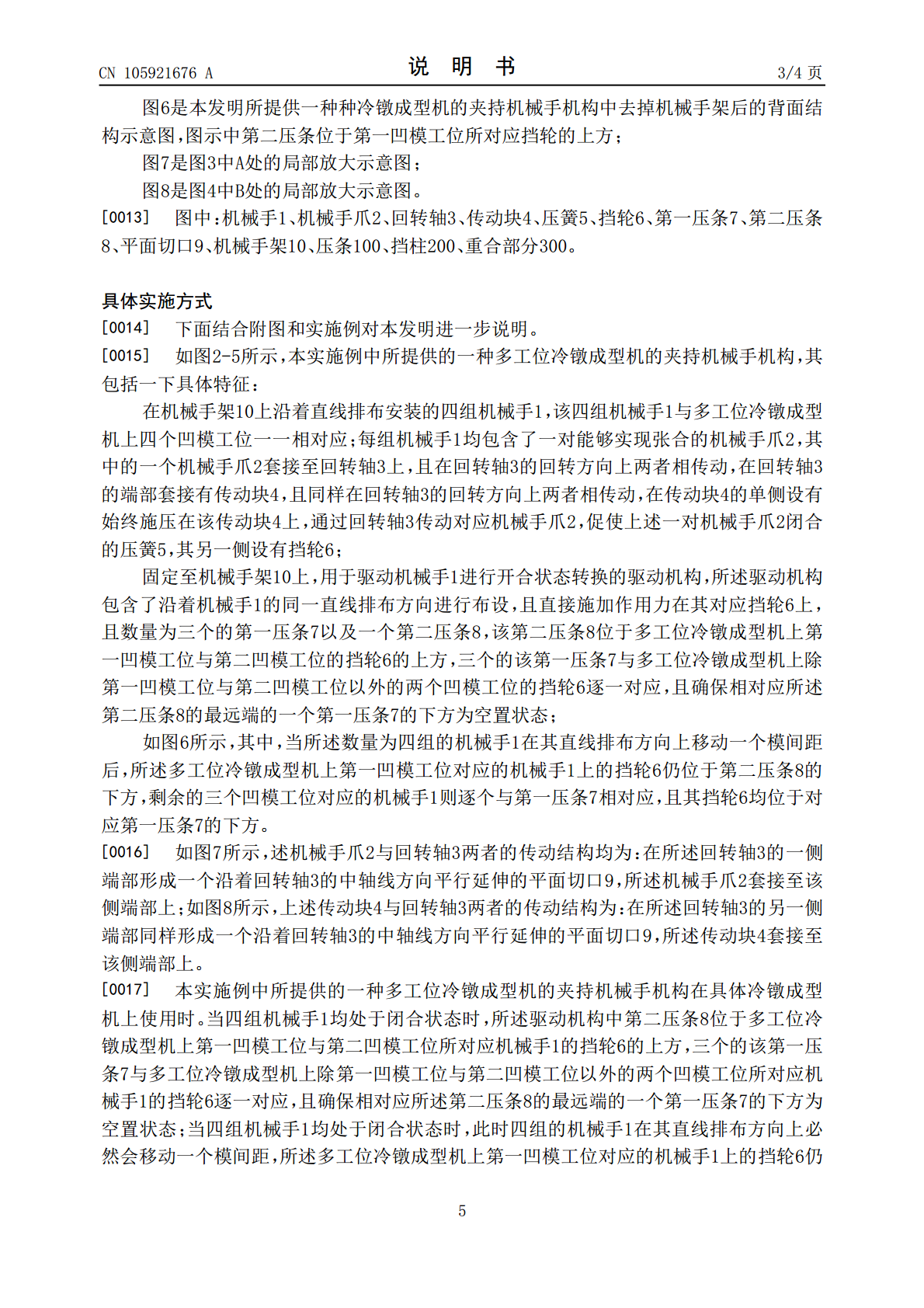
本发明公开了一种多工位冷镦成型机的夹持机械手机构,包括N组机械手以及驱动机构;驱动机构包含沿着机械手的同一直线排布方向进行布设,且数量为N‑1个的第一压条以及一个第二压条,该第二压条位于多工位冷镦成型机上第一、第二凹模工位的挡轮的上方,N‑1个第一压条与多工位冷镦成型机上除第一凹模工位与第二凹模工位以外的N‑2个凹模工位的挡轮逐一对应,且确保最远端的一个第一压条的下方为空置状态;当机械手组移动一个模间距后,多工位冷镦成型机上第一凹模工位对应的机械手上的挡轮仍位于第二压条的下方,剩余N‑1个凹模工位对应的机

多工位冷镦机机械手传动机构.pdf
本发明公开了一种多工位冷镦机机械手传动机构,包括机械手架固定座和机械手架,所述机械手架上贯穿有机械手回转轴,在机械手回转轴的一侧端部上传动套接有机械手,其另一侧端部上传动套接有半月形滚轮弹簧座,在半月形滚轮弹簧座的一侧连接有传动轴承,其另一侧的上表面配合有扁线螺旋弹簧,在机械手架固定座上还架设有传动杠杆轴,在上述传动杠杆轴上套接有机械手传动杠杆,在机械手传动杠杆的前端与半月形滚轮弹簧座上的传动轴承配合,在机械手传动杠杆的尾端可拆卸式铰接有单凸轮滚轮。本发明解决了现有国内多工位冷镦机中普遍采用弹簧式机械手传

一种具有翻转功能的多工位冷镦成型机.pdf
本发明公开了一种具有翻转功能的多工位冷镦成型机,成型机包括:夹仔台朝向夹钳座的一侧设置有主模具,主模具中容纳有待加工工件;夹钳座通过连杆与夹仔台枢连接,夹钳座上设置有至少一个翻转夹钳,每一个翻转夹钳都对应一个传动齿轮;传动齿轮的转动轴固定在夹仔台上;翻转夹钳包括:翻转齿轮、夹钳柱、夹钳臂以及夹钳片,其中,翻转齿轮与夹钳柱的一端固定连接,且翻转齿轮与传动齿轮啮合;翻转齿轮沿着翻转夹钳的运动方向的转动角度为90度;夹钳柱的另一端设有夹钳臂,夹钳臂与主模具的对应端设有夹钳片,夹钳片为两片将待加工工件夹紧。应用本
一种多工位冷镦机的进料传递机构.pdf
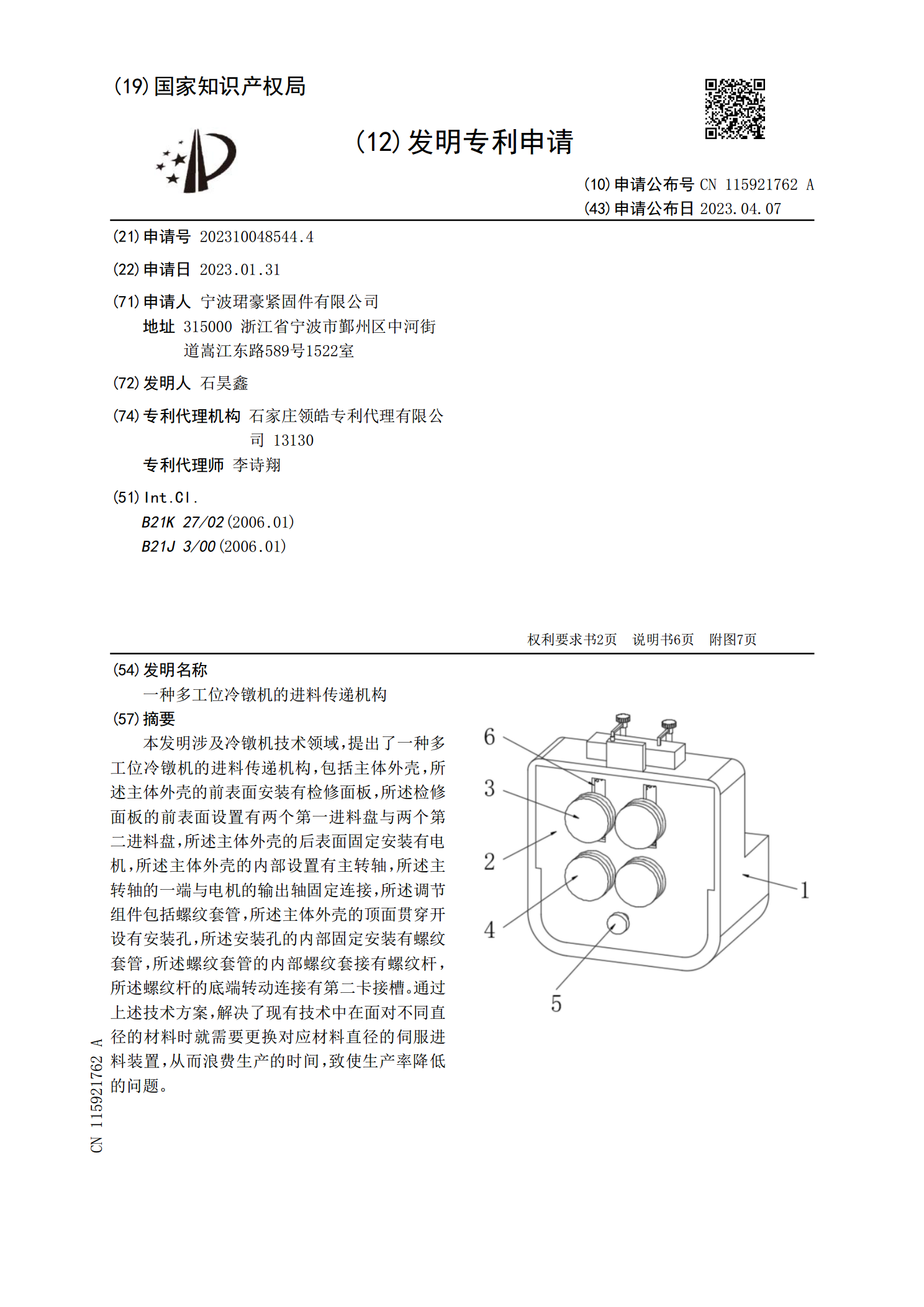
本发明涉及冷镦机技术领域,提出了一种多工位冷镦机的进料传递机构,包括主体外壳,所述主体外壳的前表面安装有检修面板,所述检修面板的前表面设置有两个第一进料盘与两个第二进料盘,所述主体外壳的后表面固定安装有电机,所述主体外壳的内部设置有主转轴,所述主转轴的一端与电机的输出轴固定连接,所述调节组件包括螺纹套管,所述主体外壳的顶面贯穿开设有安装孔,所述安装孔的内部固定安装有螺纹套管,所述螺纹套管的内部螺纹套接有螺纹杆,所述螺纹杆的底端转动连接有第二卡接槽。通过上述技术方案,解决了现有技术中在面对不同直径的材料时就

一种单工位冷镦成型机.pdf
本实用新型公开了一种单工位冷镦成型机,包括支架,所述支架上端中部焊接有方形的固定框。有益效果在于:本实用新型一方面在抽风机、吸气罩以及电推杆一的配合下能够将该单工位冷镦成型机在冷镦过程中产生的油烟进行有效的吸收排出,有效避免了冷镦加工过程中因棒料瞬间受挤压以及受剪切作用而产生的油烟弥散在单工位冷镦成型机附近,确保了单工位冷镦成型机在使用时周围环境的洁净,另一方面在红外传感器与声光报警器的作用下能够有效避免单工位冷镦成型机在检修维护过程中的误启动,从而避免了因单工位冷镦成型机在检修维护过程中的误启动而导致人