
一种姿势可调型医疗手臂按摩机器人.pdf

是你****芹呀


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种姿势可调型医疗手臂按摩机器人.pdf
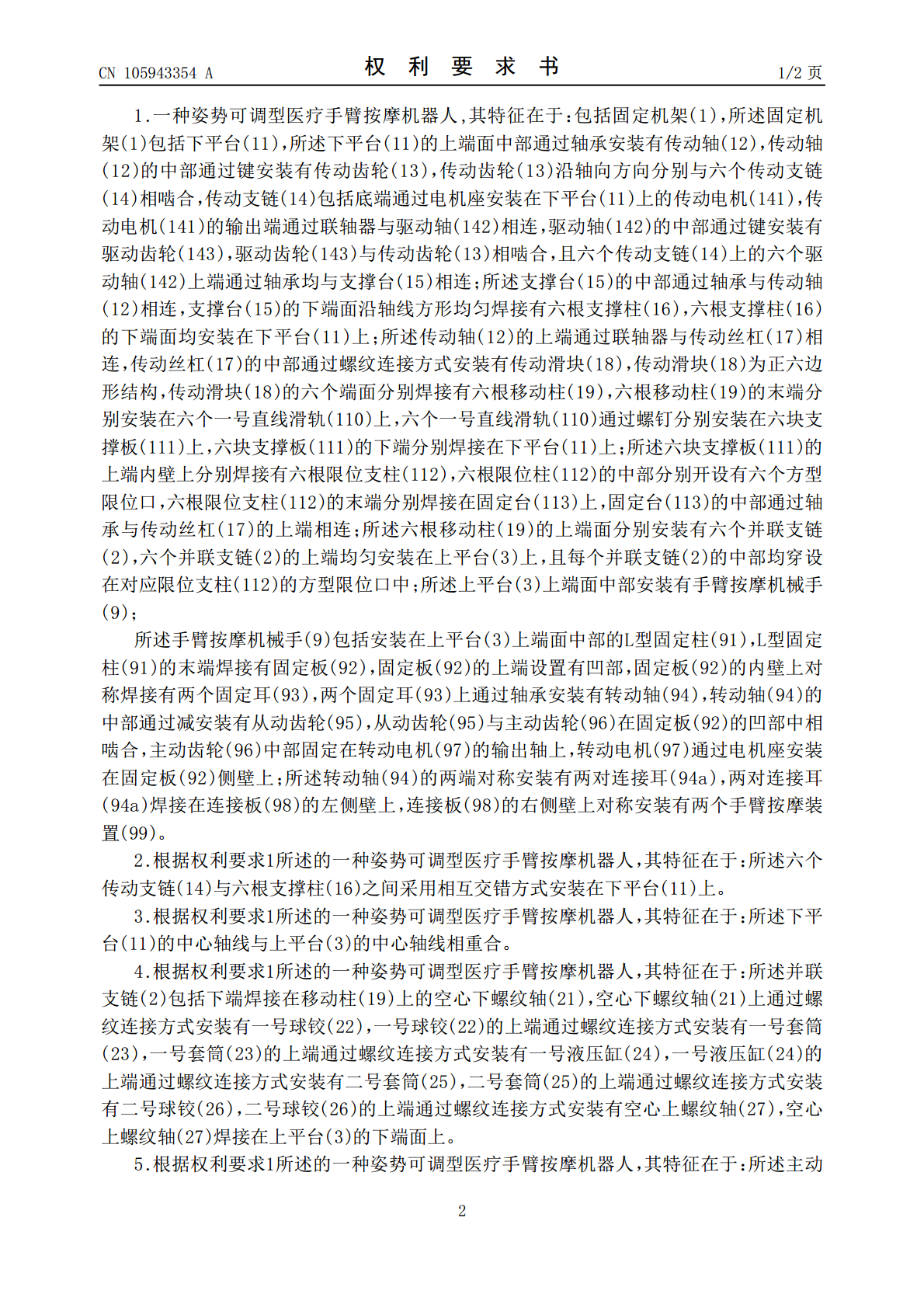
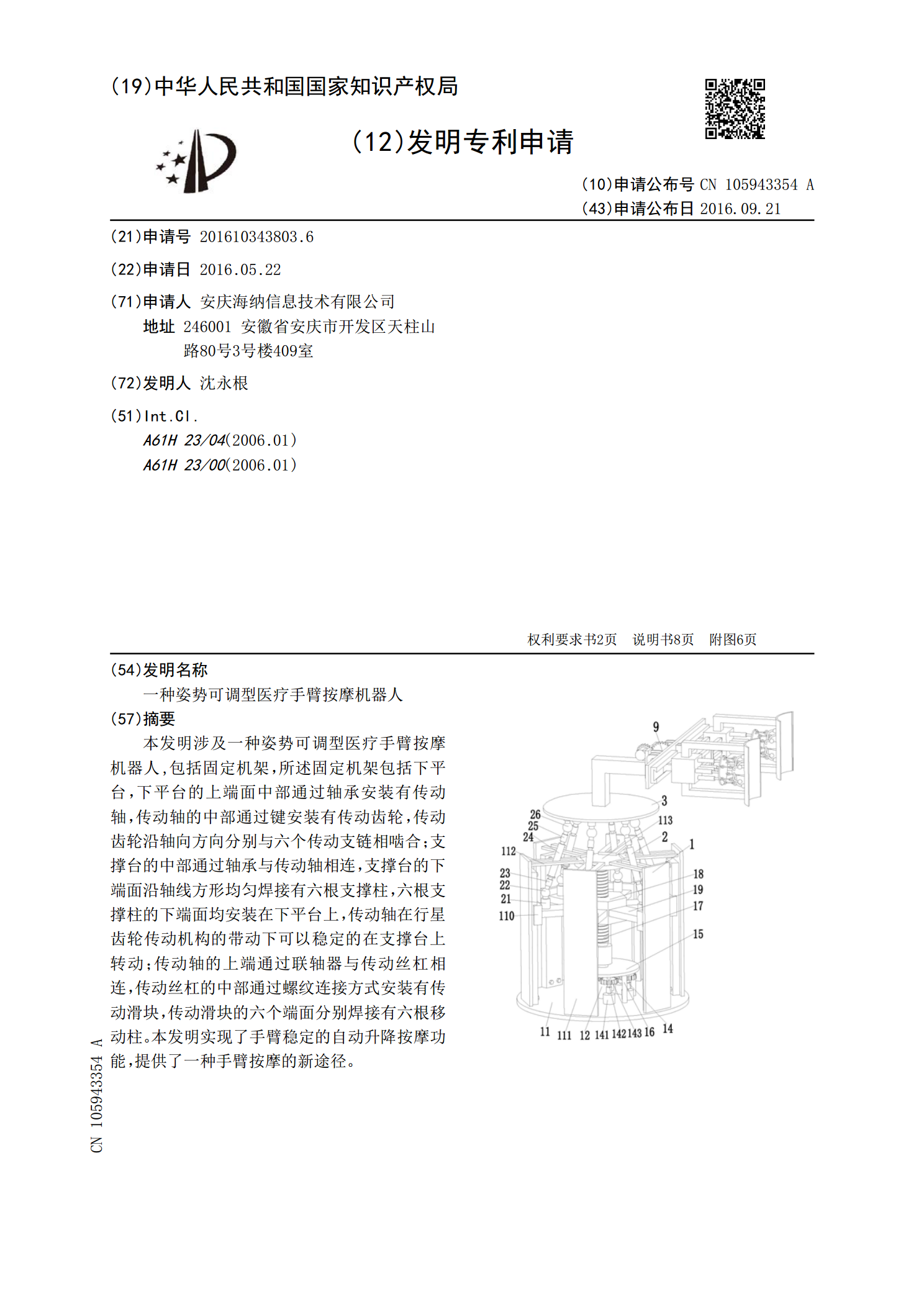
本发明涉及一种姿势可调型医疗手臂按摩机器人,包括固定机架,所述固定机架包括下平台,下平台的上端面中部通过轴承安装有传动轴,传动轴的中部通过键安装有传动齿轮,传动齿轮沿轴向方向分别与六个传动支链相啮合;支撑台的中部通过轴承与传动轴相连,支撑台的下端面沿轴线方形均匀焊接有六根支撑柱,六根支撑柱的下端面均安装在下平台上,传动轴在行星齿轮传动机构的带动下可以稳定的在支撑台上转动;传动轴的上端通过联轴器与传动丝杠相连,传动丝杠的中部通过螺纹连接方式安装有传动滑块,传动滑块的六个端面分别焊接有六根移动柱。本发明实现了
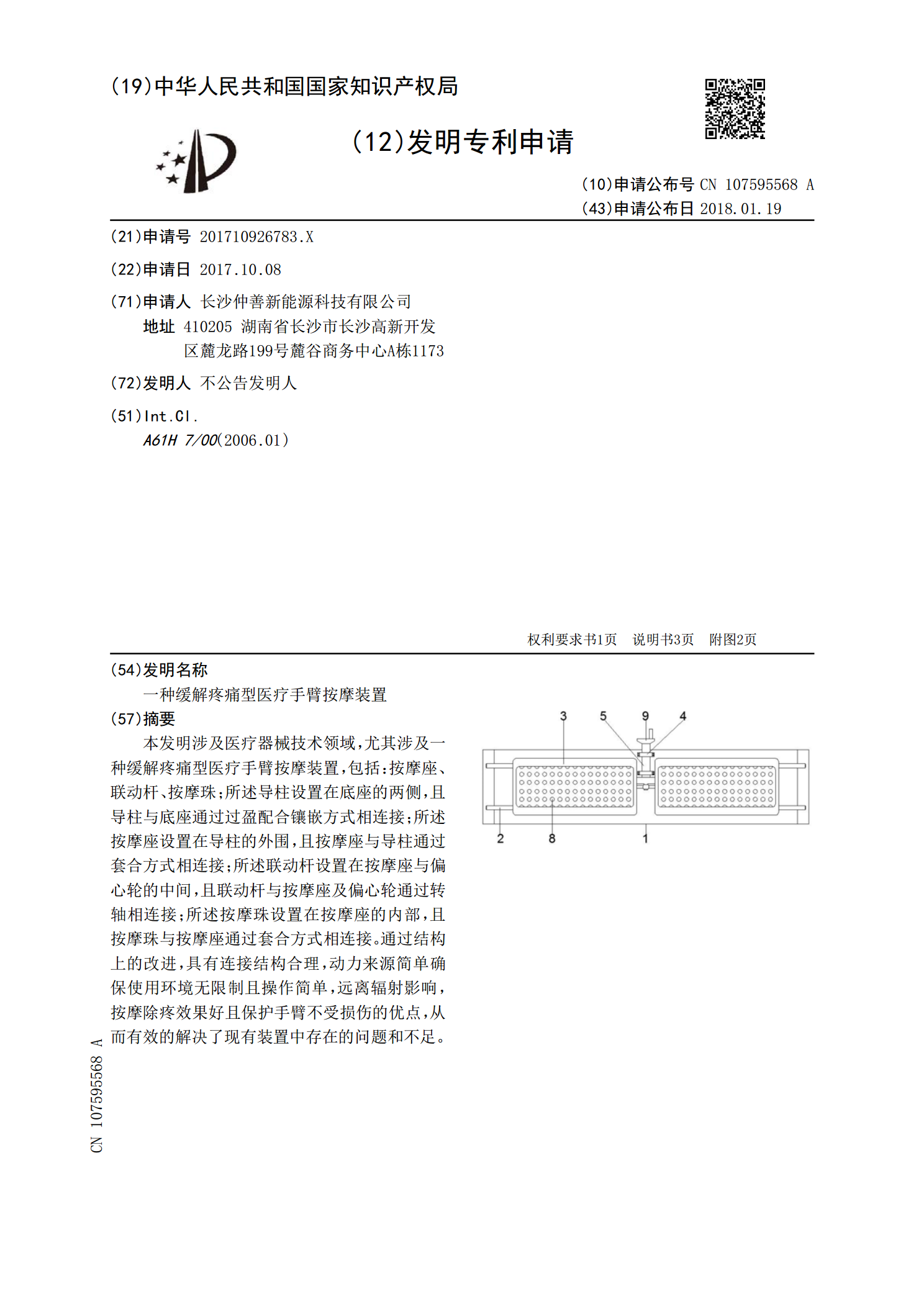
一种缓解疼痛型医疗手臂按摩装置.pdf
本发明涉及医疗器械技术领域,尤其涉及一种缓解疼痛型医疗手臂按摩装置,包括:按摩座、联动杆、按摩珠;所述导柱设置在底座的两侧,且导柱与底座通过过盈配合镶嵌方式相连接;所述按摩座设置在导柱的外围,且按摩座与导柱通过套合方式相连接;所述联动杆设置在按摩座与偏心轮的中间,且联动杆与按摩座及偏心轮通过转轴相连接;所述按摩珠设置在按摩座的内部,且按摩珠与按摩座通过套合方式相连接。通过结构上的改进,具有连接结构合理,动力来源简单确保使用环境无限制且操作简单,远离辐射影响,按摩除疼效果好且保护手臂不受损伤的优点,从而有效

一种臂宽可调式医疗手臂按摩机械手.pdf
本发明涉及一种臂宽可调式医疗手臂按摩机械手,包括L型固定柱,L型固定柱的末端焊接有固定板,固定板的上端设置有凹部,固定板的内壁上对称焊接有两个固定耳,两个固定耳上通过轴承安装有转动轴,转动轴的中部通过减安装有从动齿轮,从动齿轮与主动齿轮在固定板的凹部中相啮合,主动齿轮中部固定在转动电机的输出轴上,转动电机通过电机座安装在固定板侧壁上;所述转动轴的两端对称安装有两对连接耳,两对连接耳焊接在连接板的左侧壁上,连接板的右侧壁上对称安装有两个手臂按摩装置,两个手臂按摩装置可以实现手臂的自动按摩功能。本发明实现了手

一种肩宽可调式医疗肩部按摩机器人.pdf
本发明涉及一种肩宽可调式医疗肩部按摩机器人,包括固定机架,所述固定机架包括下平台,所述下平台的上端面中部通过轴承安装有传动轴,传动轴的中部通过键安装有传动齿轮,传动齿轮沿轴向方向分别与六个传动支链相啮合,传动支链包括底端通过电机座安装在下平台上的传动电机,传动电机的输出端通过联轴器与驱动轴相连,驱动轴的中部通过键安装有驱动齿轮,驱动齿轮与传动齿轮相啮合,且六个传动支链上的六个驱动轴上端通过轴承均与支撑台相连;所述上平台上端面中部安装有肩部按摩机械手。本发明可以实现肩部稳定的超声波均匀按摩功能,提供了一种肩
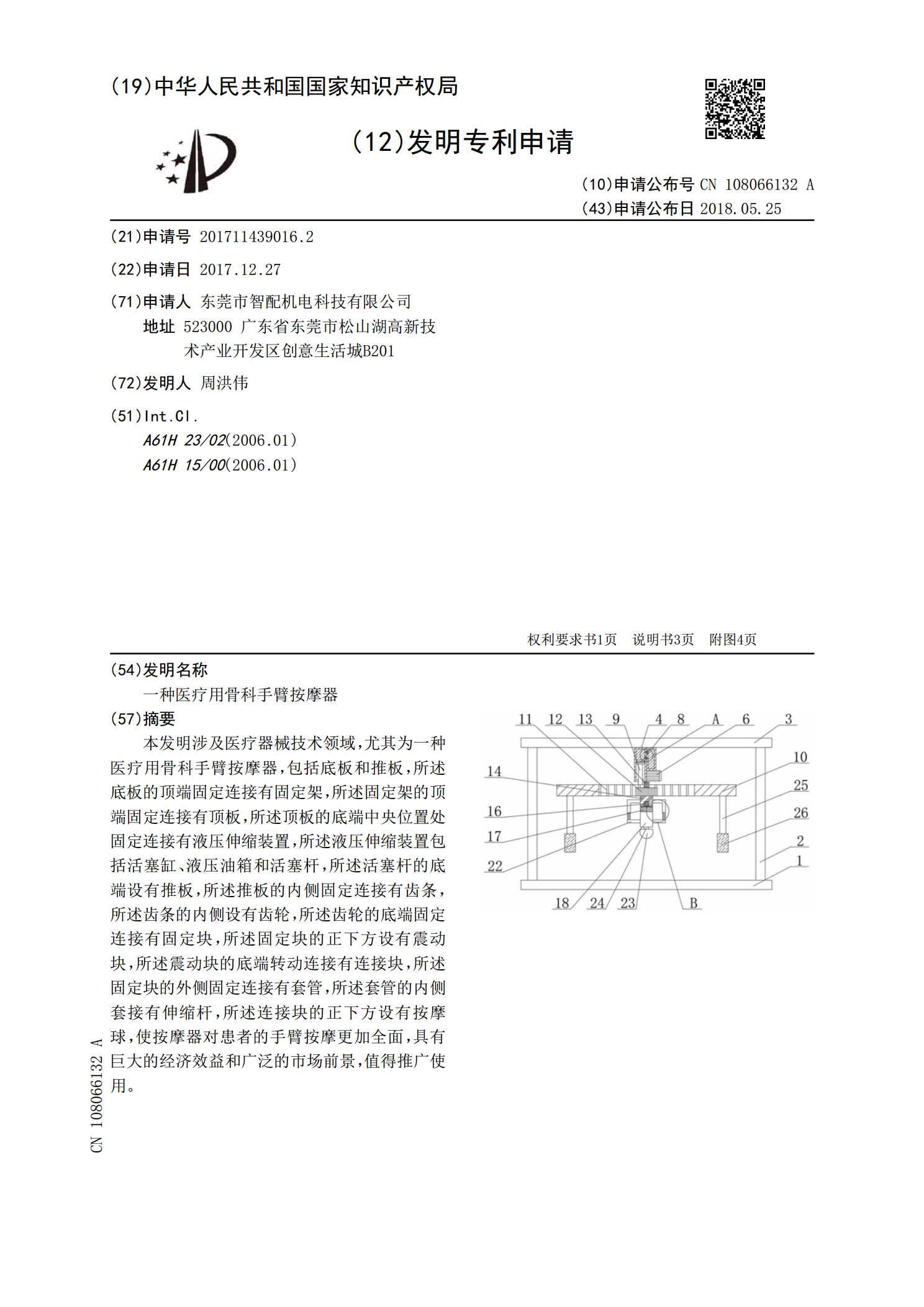
一种医疗用骨科手臂按摩器.pdf
本发明涉及医疗器械技术领域,尤其为一种医疗用骨科手臂按摩器,包括底板和推板,所述底板的顶端固定连接有固定架,所述固定架的顶端固定连接有顶板,所述顶板的底端中央位置处固定连接有液压伸缩装置,所述液压伸缩装置包括活塞缸、液压油箱和活塞杆,所述活塞杆的底端设有推板,所述推板的内侧固定连接有齿条,所述齿条的内侧设有齿轮,所述齿轮的底端固定连接有固定块,所述固定块的正下方设有震动块,所述震动块的底端转动连接有连接块,所述固定块的外侧固定连接有套管,所述套管的内侧套接有伸缩杆,所述连接块的正下方设有按摩球,使按摩器对