
一种肩宽可调式医疗肩部按摩机器人.pdf

鹏飞****可爱

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种肩宽可调式医疗肩部按摩机器人.pdf
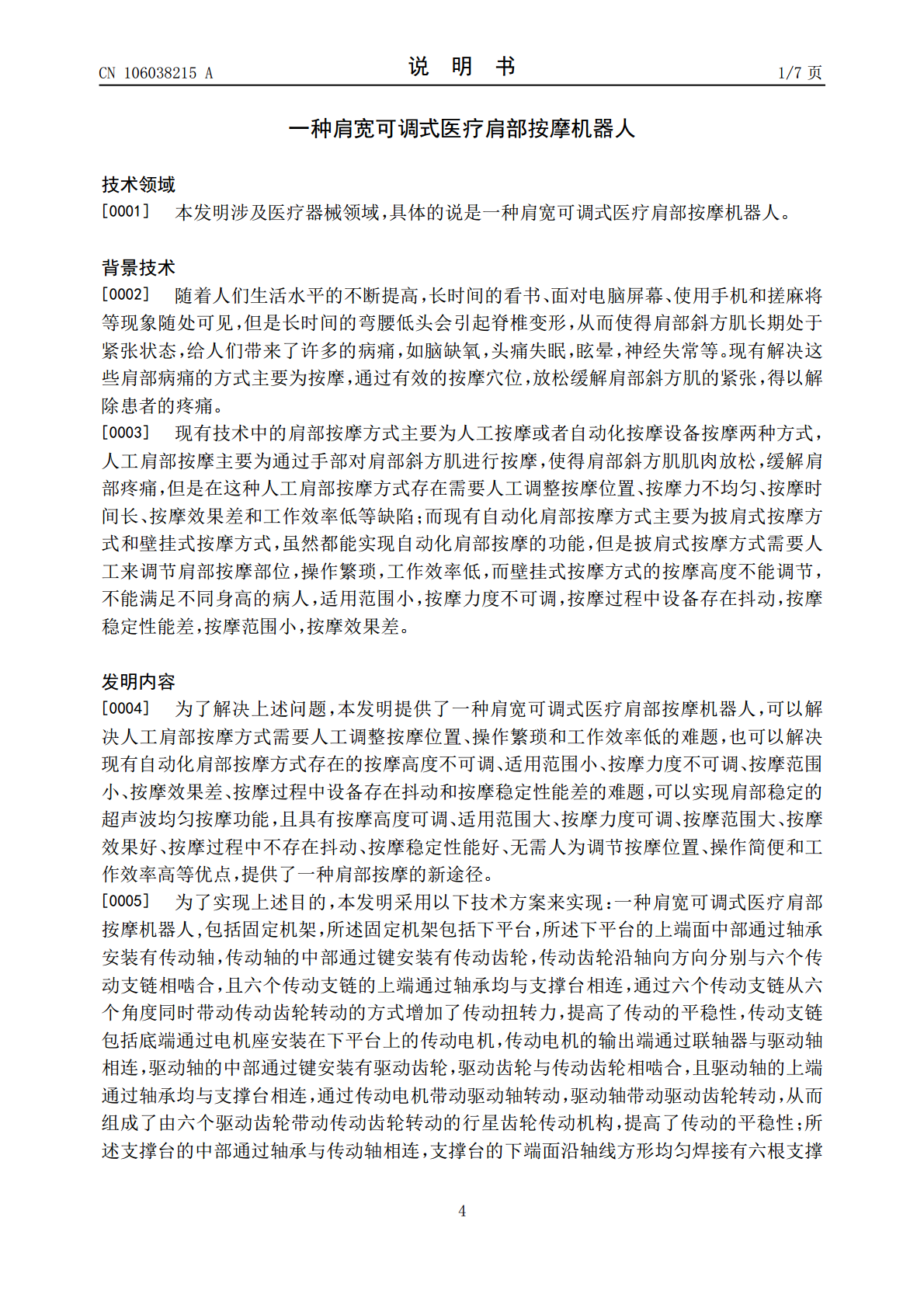
本发明涉及一种肩宽可调式医疗肩部按摩机器人,包括固定机架,所述固定机架包括下平台,所述下平台的上端面中部通过轴承安装有传动轴,传动轴的中部通过键安装有传动齿轮,传动齿轮沿轴向方向分别与六个传动支链相啮合,传动支链包括底端通过电机座安装在下平台上的传动电机,传动电机的输出端通过联轴器与驱动轴相连,驱动轴的中部通过键安装有驱动齿轮,驱动齿轮与传动齿轮相啮合,且六个传动支链上的六个驱动轴上端通过轴承均与支撑台相连;所述上平台上端面中部安装有肩部按摩机械手。本发明可以实现肩部稳定的超声波均匀按摩功能,提供了一种肩

一种臂宽可调式医疗手臂按摩机械手.pdf
本发明涉及一种臂宽可调式医疗手臂按摩机械手,包括L型固定柱,L型固定柱的末端焊接有固定板,固定板的上端设置有凹部,固定板的内壁上对称焊接有两个固定耳,两个固定耳上通过轴承安装有转动轴,转动轴的中部通过减安装有从动齿轮,从动齿轮与主动齿轮在固定板的凹部中相啮合,主动齿轮中部固定在转动电机的输出轴上,转动电机通过电机座安装在固定板侧壁上;所述转动轴的两端对称安装有两对连接耳,两对连接耳焊接在连接板的左侧壁上,连接板的右侧壁上对称安装有两个手臂按摩装置,两个手臂按摩装置可以实现手臂的自动按摩功能。本发明实现了手

一种医疗护理用肩部按摩设备.pdf
一种医疗护理用肩部按摩设备,包括颈部按摩装置和肩部按摩装置;颈部按摩装置包括夹持部和多个第一按摩部;第一按摩部内设置按摩仓;第一按摩部包括充电电池、多个转动件、多个按摩球和多个连接杆;转动件上设置用于驱动转动件转动的第一动力机构;肩部按摩装置包括多个第二按摩部;多个第二按摩部依次首尾连接设置;第二按摩部内设置按摩腔;第二按摩部包括齿轮、支撑杆、固定柱、转动杆和弹簧件;按摩腔内设置用于驱动齿轮转动的第二动力机构。本发明通过颈部按摩装置和肩部按摩装置的设计,得到了一种可以对肩部和颈部进行按摩,并且能针对肩部的

一种医疗护理用肩部按摩设备.pdf
本发明涉及一种肩部按摩设备,尤其涉及一种医疗护理用肩部按摩设备。本发明要解决的技术问题是提供一种按摩效果佳、按摩比较舒适、能够进行调节、操作简单的医疗护理用肩部按摩设备。为了解决上述技术问题,本发明提供了这样一种医疗护理用肩部按摩设备,包括有底板、第一弹簧、移动块、滚轴等;底板顶部左侧设有左支架,底板顶部右侧设有右支架,底板顶部中间设有支杆,支杆顶部设有坐板,右支架左侧上部设有电机。本发明通过点击工作,带动转轴旋转,即可带动扇形齿轮旋转,移动块上下移动,即可带动按摩块左右移动,即可对肩部进行左右按摩,使病

一种骨科医疗并联型肩部超声波按摩护理机器人.pdf
本发明涉及一种骨科医疗并联型肩部超声波按摩护理机器人,包括固定机架,所述固定机架包括下平台,所述下平台的上端面中部通过轴承安装有传动轴,传动轴的中部通过键安装有传动齿轮,传动齿轮沿轴向方向分别与六个传动支链相啮合,传动支链包括底端通过电机座安装在下平台上的传动电机,传动电机的输出端通过联轴器与驱动轴相连,驱动轴的中部通过键安装有驱动齿轮,驱动齿轮与传动齿轮相啮合,且六个传动支链上的六个驱动轴上端通过轴承均与支撑台相连;所述上平台上端面中部安装有肩部按摩机械手。本发明可以实现肩部稳定的超声波均匀按摩功能,提