
带有夹持臂驱动组件的超声刀头.pdf

秀美****甜v


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

带有夹持臂驱动组件的超声刀头.pdf
本发明涉及一种带有夹持臂驱动组件的超声刀头,其解决了现有技术发力不平稳、归位困难的技术问题,其设有夹持臂、夹持臂驱动组件,夹持臂驱动组件包括手柄、齿轮、滑块、推管和回位装置,齿轮设于手柄和滑块之间,滑块与推管连接,回位装置与滑块连接,推管与夹持臂连接。本发明可用于外科手术中。

带有夹持臂驱动装置的超声刀头.pdf
本发明涉及一种带有夹持臂驱动装置的超声刀头,其解决了现有技术手柄闭合后需要继续施加握力导致医生手部疲劳的技术问题,其设有夹持臂、夹持臂驱动装置,夹持臂驱动装置包括手柄、滑块、推管和回位装置,凸轮设于手柄上,滚子设于滑块上,凸轮与滚子接触,滑块与推管连接,回位装置与滑块连接,推管与夹持臂连接。本发明可用于外科手术中。
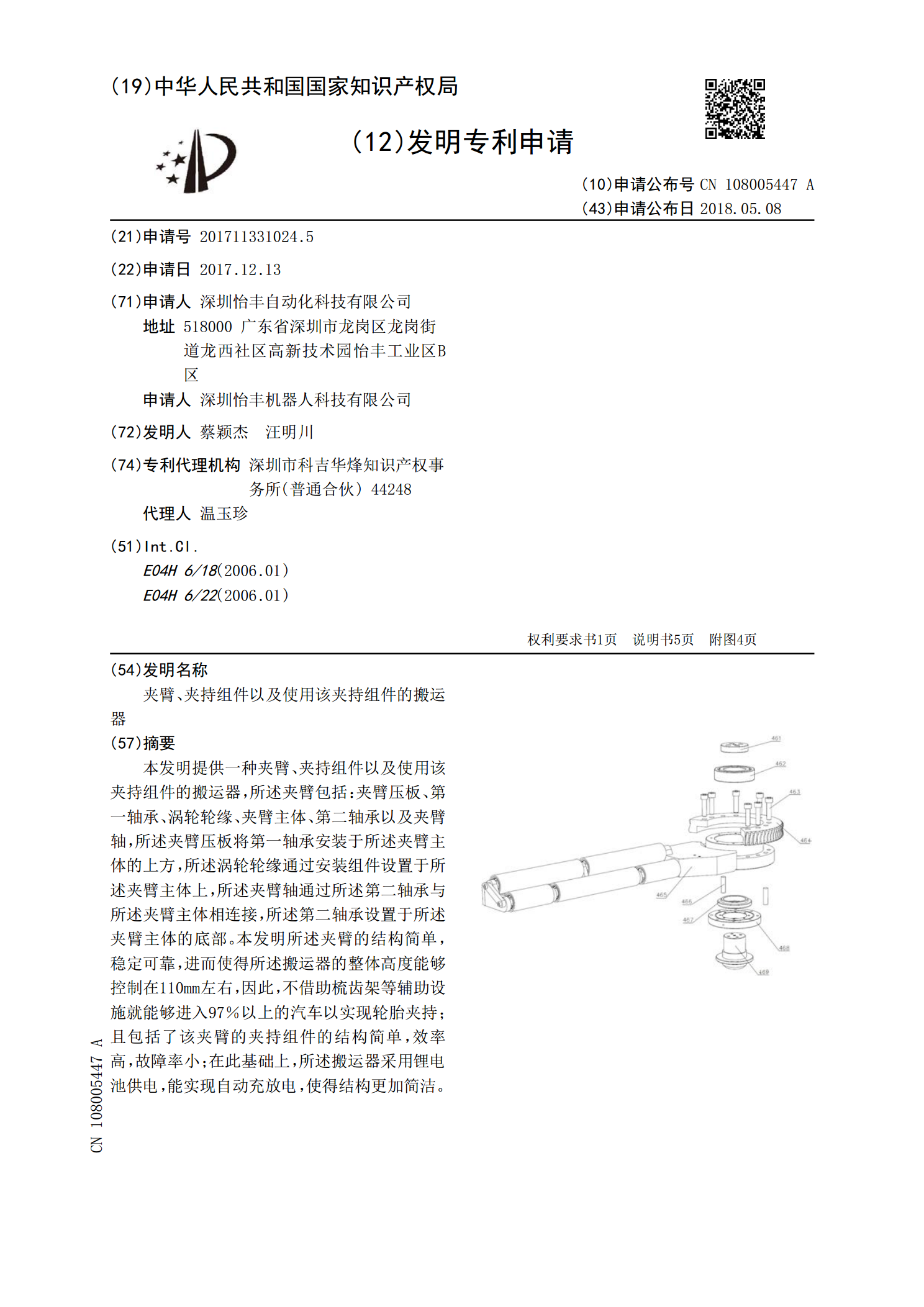
夹臂、夹持组件以及使用该夹持组件的搬运器.pdf
本发明提供一种夹臂、夹持组件以及使用该夹持组件的搬运器,所述夹臂包括:夹臂压板、第一轴承、涡轮轮缘、夹臂主体、第二轴承以及夹臂轴,所述夹臂压板将第一轴承安装于所述夹臂主体的上方,所述涡轮轮缘通过安装组件设置于所述夹臂主体上,所述夹臂轴通过所述第二轴承与所述夹臂主体相连接,所述第二轴承设置于所述夹臂主体的底部。本发明所述夹臂的结构简单,稳定可靠,进而使得所述搬运器的整体高度能够控制在110mm左右,因此,不借助梳齿架等辅助设施就能够进入97%以上的汽车以实现轮胎夹持;且包括了该夹臂的夹持组件的结构简单,效率
带有驱动组件的处理盒.pdf
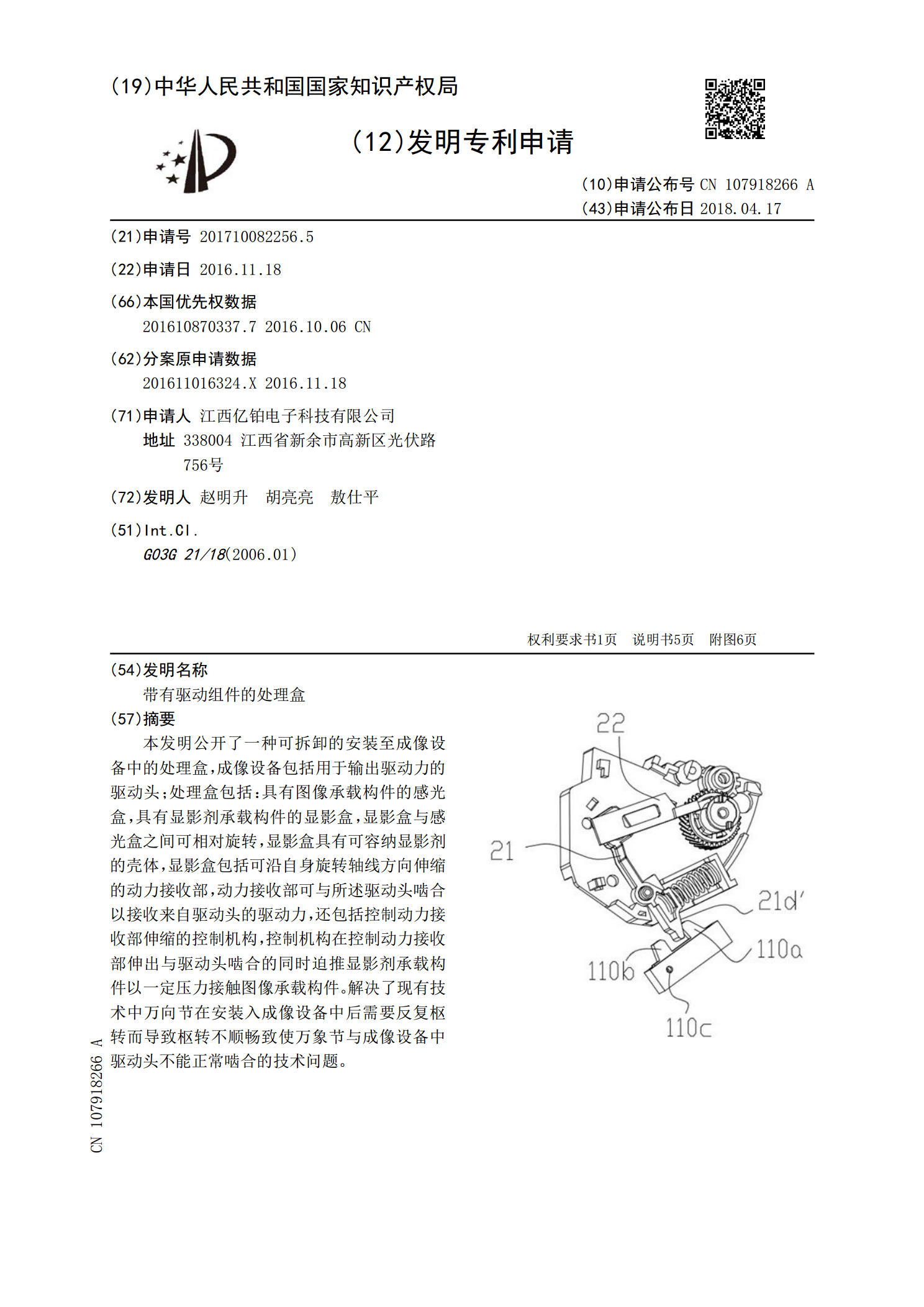
本发明公开了一种可拆卸的安装至成像设备中的处理盒,成像设备包括用于输出驱动力的驱动头;处理盒包括:具有图像承载构件的感光盒,具有显影剂承载构件的显影盒,显影盒与感光盒之间可相对旋转,显影盒具有可容纳显影剂的壳体,显影盒包括可沿自身旋转轴线方向伸缩的动力接收部,动力接收部可与所述驱动头啮合以接收来自驱动头的驱动力,还包括控制动力接收部伸缩的控制机构,控制机构在控制动力接收部伸出与驱动头啮合的同时迫推显影剂承载构件以一定压力接触图像承载构件。解决了现有技术中万向节在安装入成像设备中后需要反复枢转而导致枢转不顺
带有驱动组件的处理盒.pdf
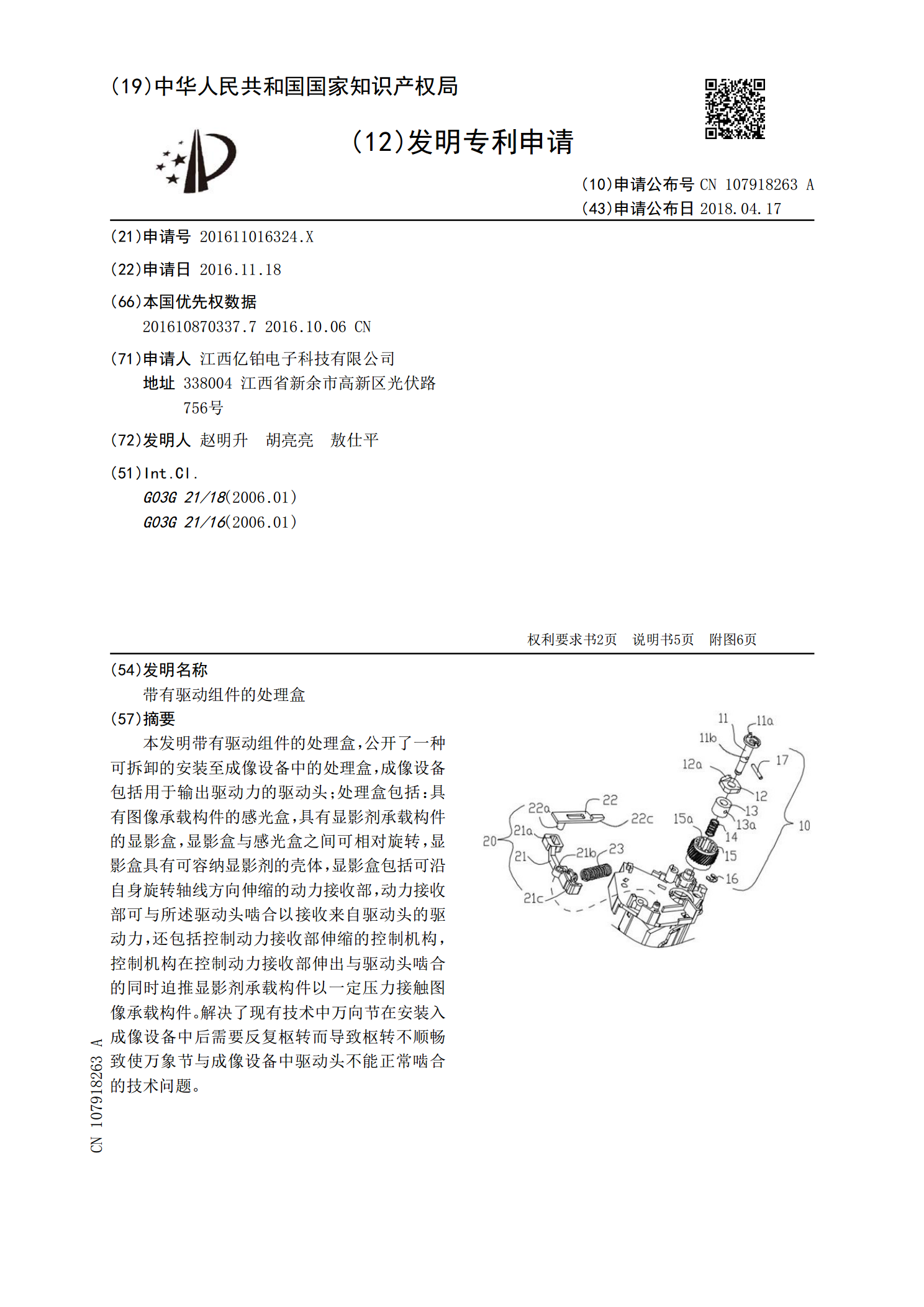
本发明带有驱动组件的处理盒,公开了一种可拆卸的安装至成像设备中的处理盒,成像设备包括用于输出驱动力的驱动头;处理盒包括:具有图像承载构件的感光盒,具有显影剂承载构件的显影盒,显影盒与感光盒之间可相对旋转,显影盒具有可容纳显影剂的壳体,显影盒包括可沿自身旋转轴线方向伸缩的动力接收部,动力接收部可与所述驱动头啮合以接收来自驱动头的驱动力,还包括控制动力接收部伸缩的控制机构,控制机构在控制动力接收部伸出与驱动头啮合的同时迫推显影剂承载构件以一定压力接触图像承载构件。解决了现有技术中万向节在安装入成像设备中后需要