
可变结构参数柔索并联机器人减振装置.pdf

mm****酱吖

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可变结构参数柔索并联机器人减振装置.pdf
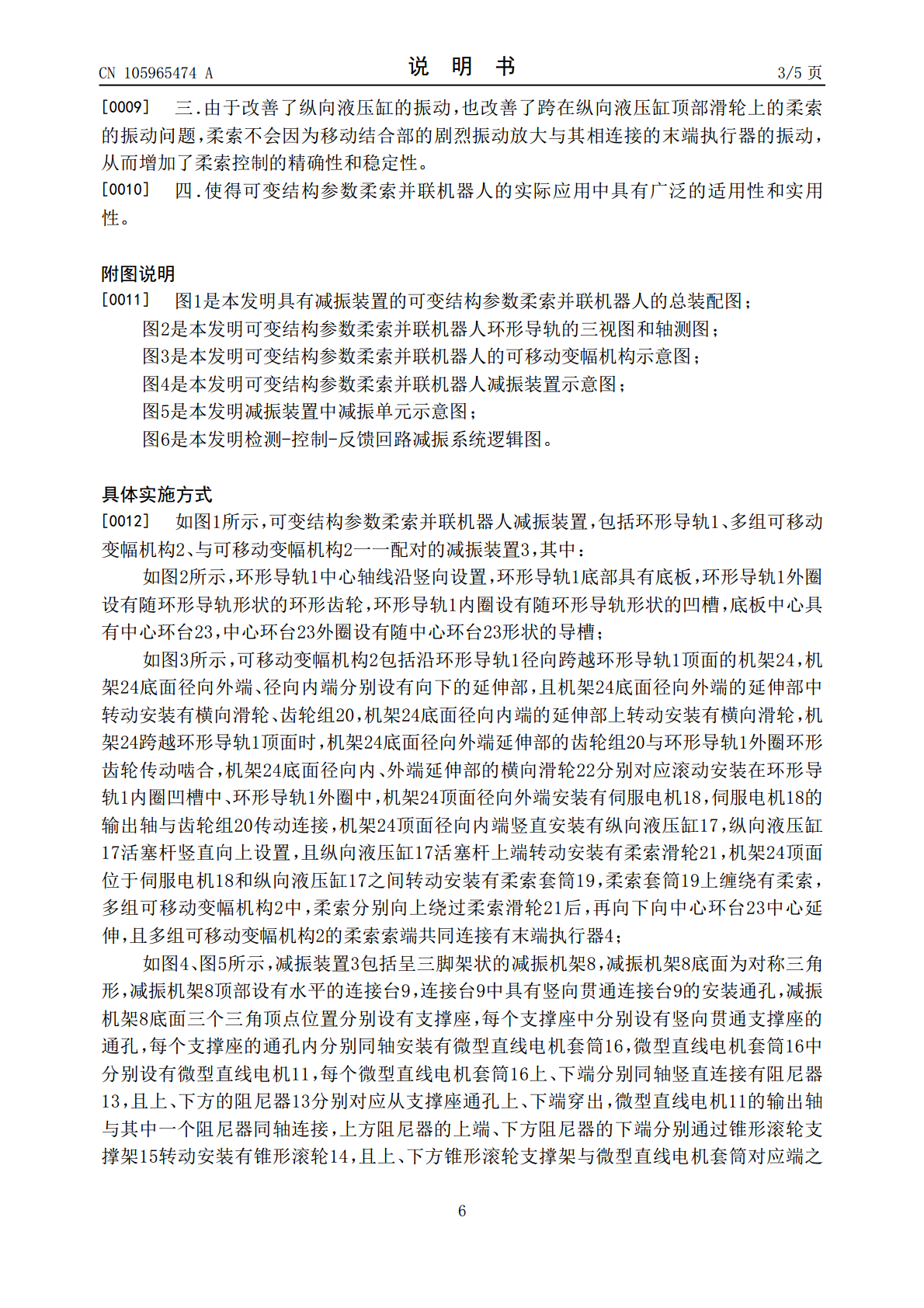
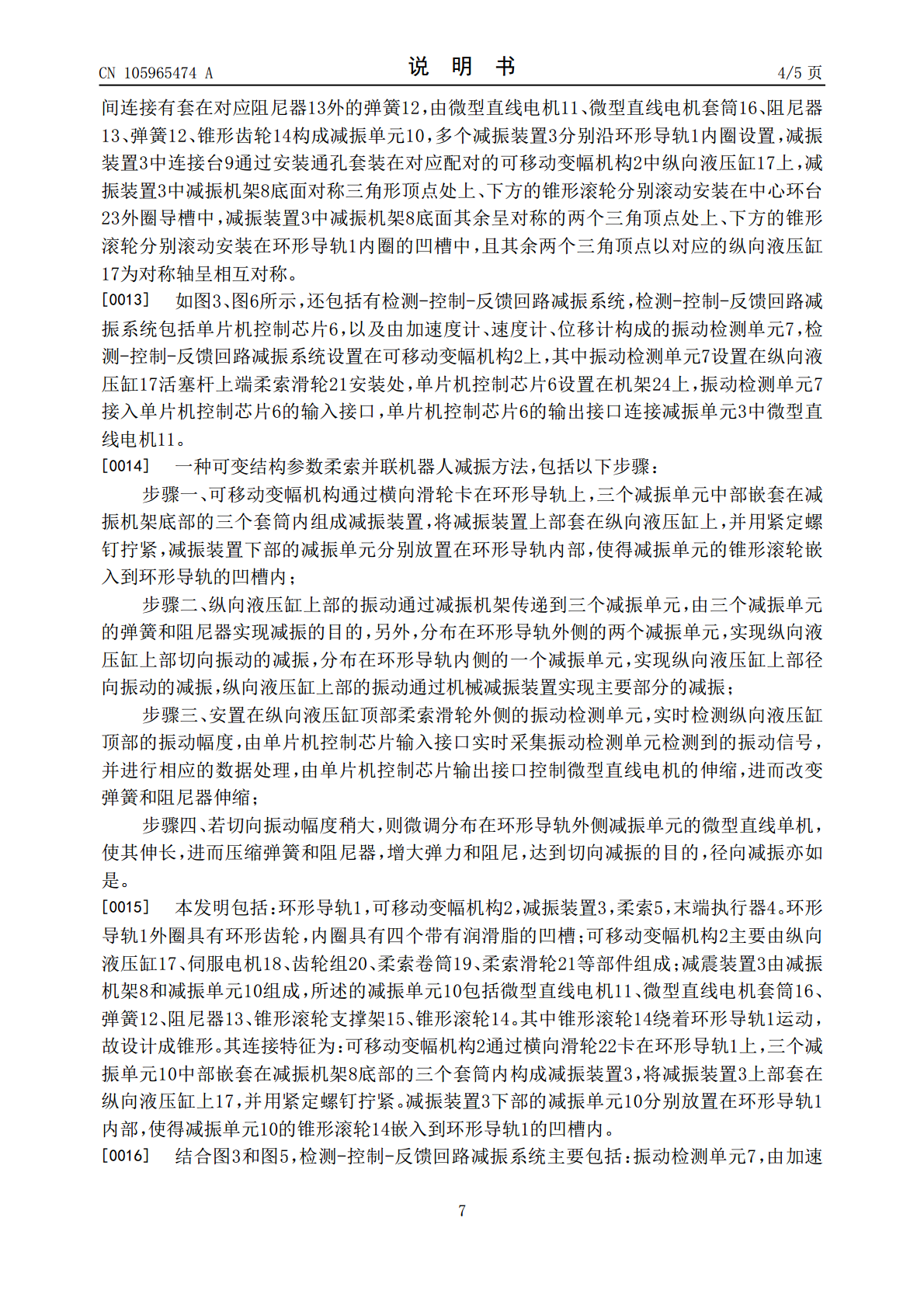
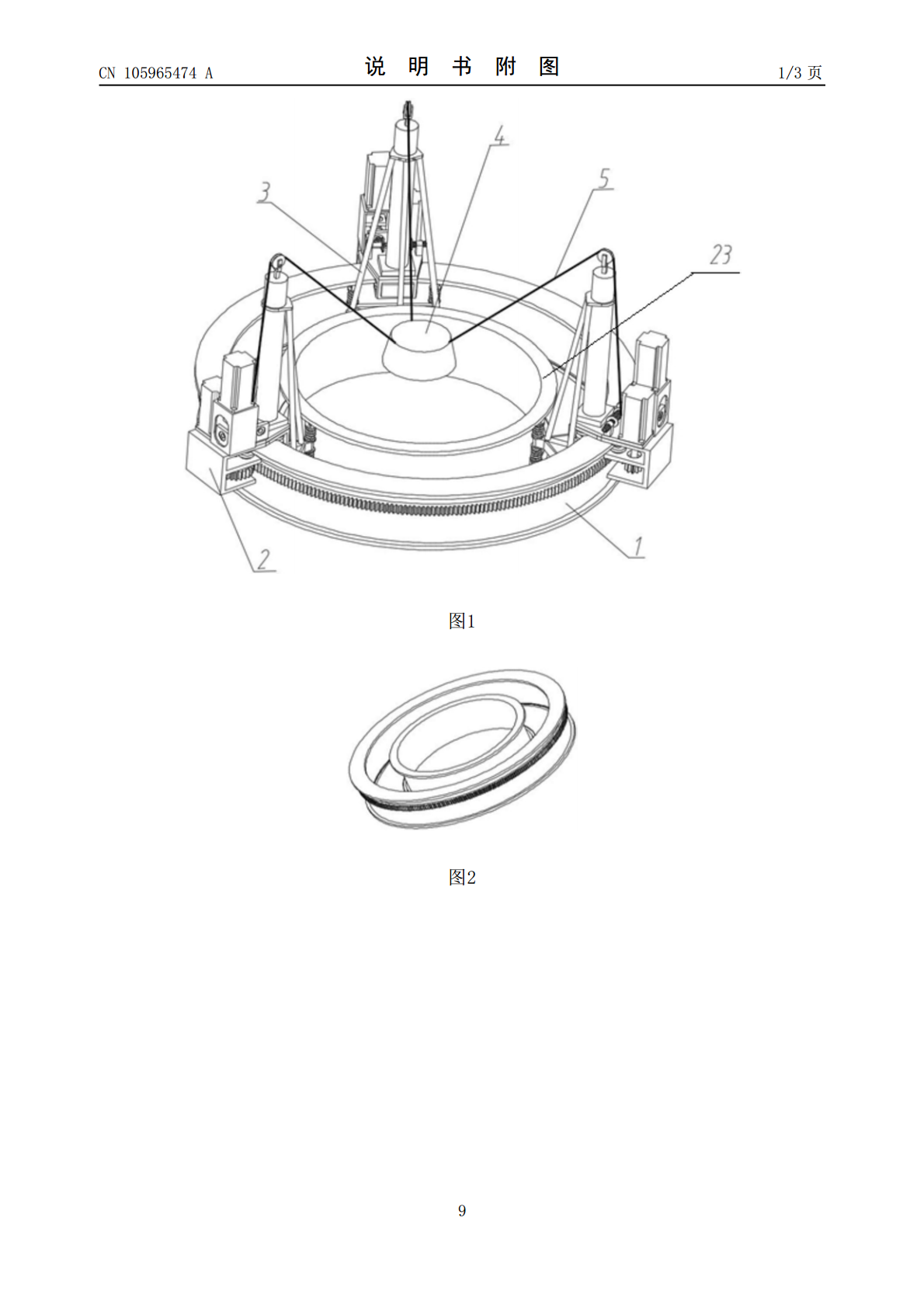
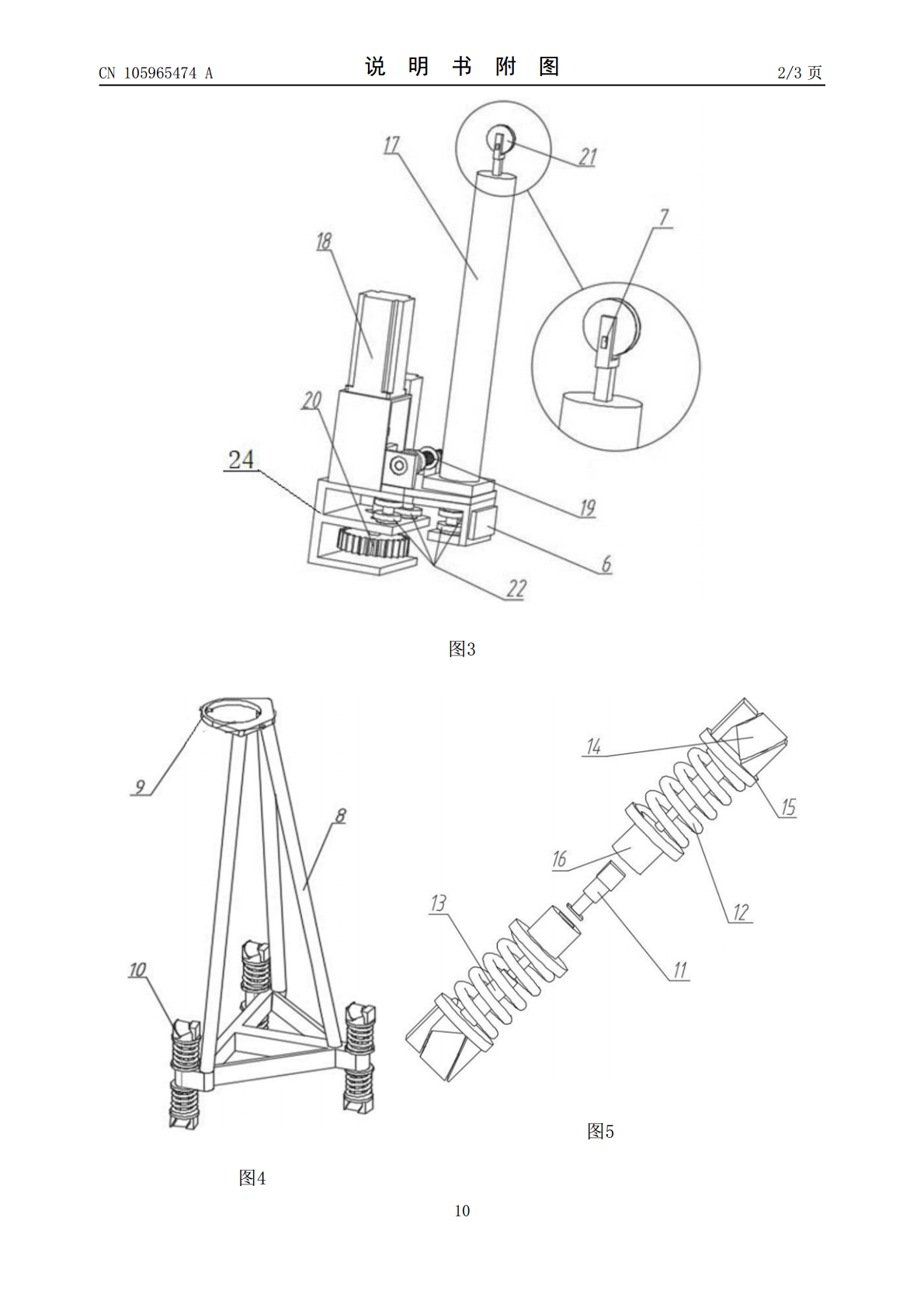
本发明公开了一种可变结构参数柔索并联机器人减振装置,包括环形导轨、多组可移动变幅机构、与可移动变幅机构一一配对的减振装置。由多组可移动变幅机构通过横向滑轮卡在环形导轨上,三个减振单元中部嵌套在减振机架底部的三个套筒内,组成减振装置。本发明能够有效的优化可变结构参数柔索并联机器人运作过程中的振动问题,提高柔索并联机器人运作时的稳定性、安全性和可靠性,并极大地提高了柔索并联机器人的运动精度。
可变构型柔索驱动并联机器人.pdf
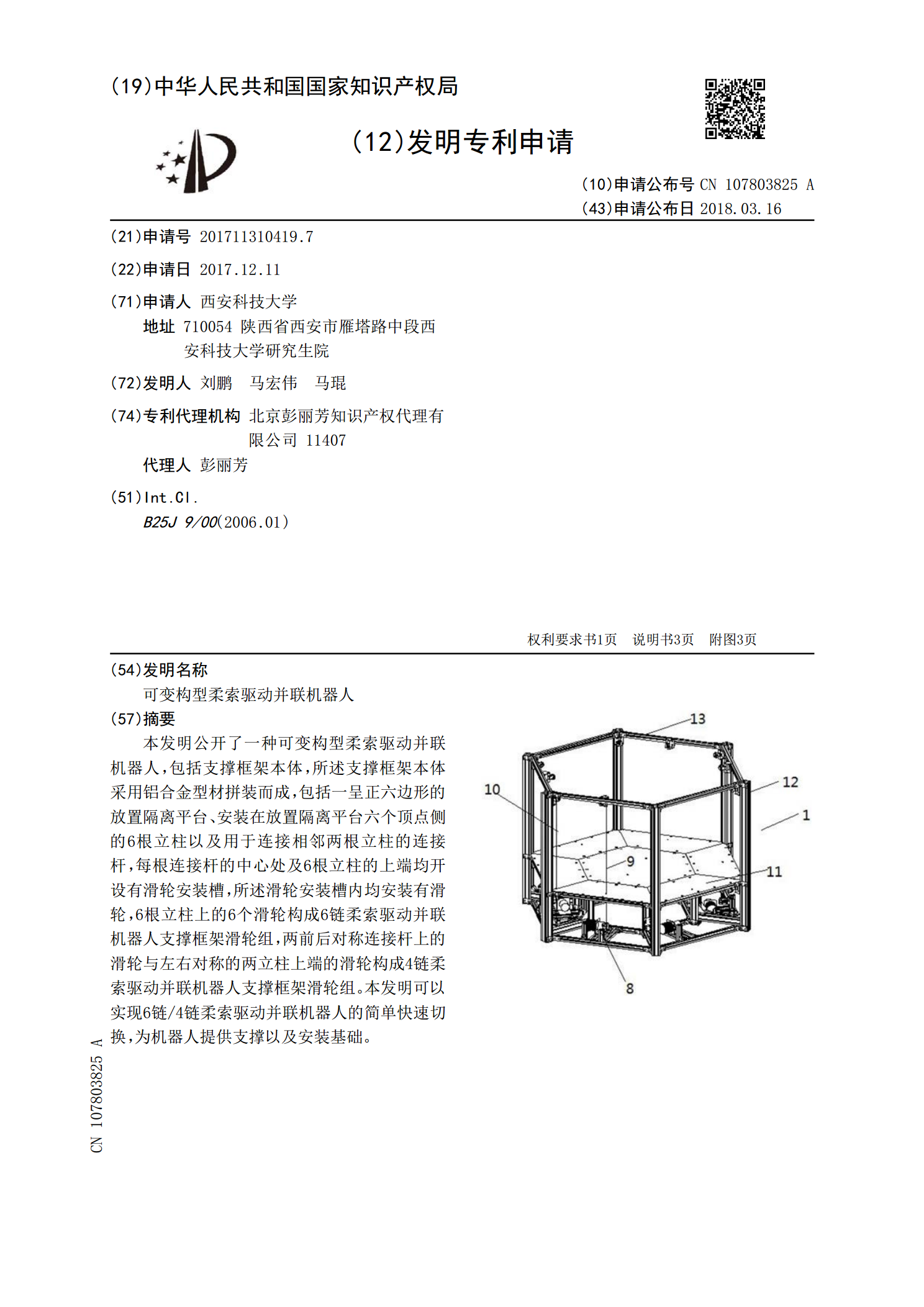
本发明公开了一种可变构型柔索驱动并联机器人,包括支撑框架本体,所述支撑框架本体采用铝合金型材拼装而成,包括一呈正六边形的放置隔离平台、安装在放置隔离平台六个顶点侧的6根立柱以及用于连接相邻两根立柱的连接杆,每根连接杆的中心处及6根立柱的上端均开设有滑轮安装槽,所述滑轮安装槽内均安装有滑轮,6根立柱上的6个滑轮构成6链柔索驱动并联机器人支撑框架滑轮组,两前后对称连接杆上的滑轮与左右对称的两立柱上端的滑轮构成4链柔索驱动并联机器人支撑框架滑轮组。本发明可以实现6链/4链柔索驱动并联机器人的简单快速切换,为机器
一种完全约束柔索并联机器人变刚度装置.pdf
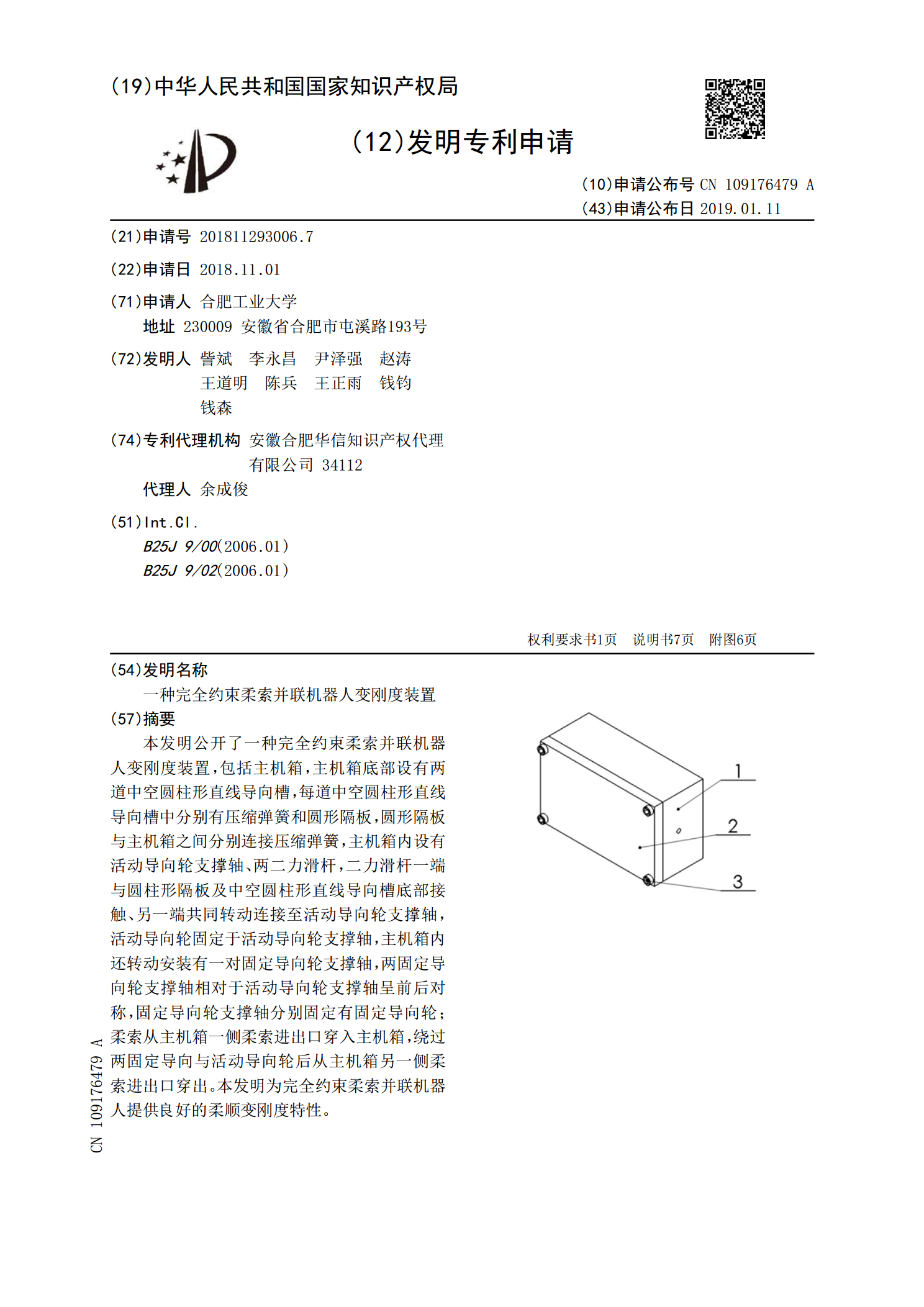
本发明公开了一种完全约束柔索并联机器人变刚度装置,包括主机箱,主机箱底部设有两道中空圆柱形直线导向槽,每道中空圆柱形直线导向槽中分别有压缩弹簧和圆形隔板,圆形隔板与主机箱之间分别连接压缩弹簧,主机箱内设有活动导向轮支撑轴、两二力滑杆,二力滑杆一端与圆柱形隔板及中空圆柱形直线导向槽底部接触、另一端共同转动连接至活动导向轮支撑轴,活动导向轮固定于活动导向轮支撑轴,主机箱内还转动安装有一对固定导向轮支撑轴,两固定导向轮支撑轴相对于活动导向轮支撑轴呈前后对称,固定导向轮支撑轴分别固定有固定导向轮;柔索从主机箱一侧

柔索牵引并联机器人的简介及发展概况.doc
第一章绪论1.1论文的研究背景及意义随着科学技术的发展以及人们对视频画面质量的要求不断提高,在进行电视转播时,经常需要摄影设备对空中全景进行拍摄,借助于摇臂摄像机、曲臂升降车和直升机航拍设备来完成上述任务是比较成熟的手段,但由于工作区域及拍摄角度等各种条件的限制,这些拍摄设备都不能很好的完成空中拍摄任务。近年来,柔索牵引摄像机机器人的出现为上述问题提供了一个非常完美的解决方法。柔索牵引摄像机器人在广场,大型演播室等三维空间内可达到无盲点旋动、悬停飞行等效果,从而为观众提供一场非同一般的视觉盛宴。早在198
减振底盘结构、减振装置及轮椅.pdf
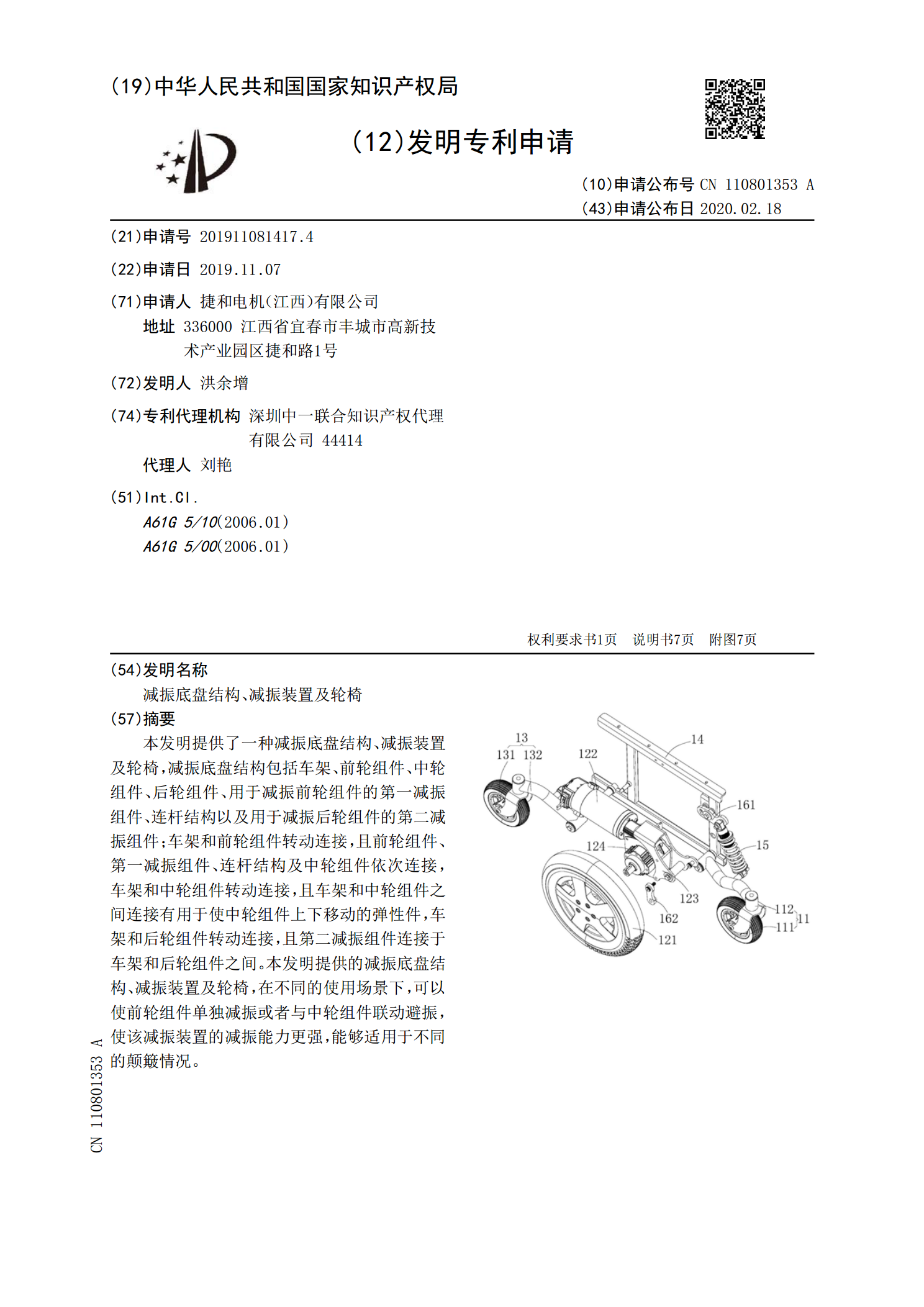
本发明提供了一种减振底盘结构、减振装置及轮椅,减振底盘结构包括车架、前轮组件、中轮组件、后轮组件、用于减振前轮组件的第一减振组件、连杆结构以及用于减振后轮组件的第二减振组件;车架和前轮组件转动连接,且前轮组件、第一减振组件、连杆结构及中轮组件依次连接,车架和中轮组件转动连接,且车架和中轮组件之间连接有用于使中轮组件上下移动的弹性件,车架和后轮组件转动连接,且第二减振组件连接于车架和后轮组件之间。本发明提供的减振底盘结构、减振装置及轮椅,在不同的使用场景下,可以使前轮组件单独减振或者与中轮组件联动避振,使该