
一种输电线路杆塔攀爬巡视机器人.pdf

An****99

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种输电线路杆塔攀爬巡视机器人.pdf
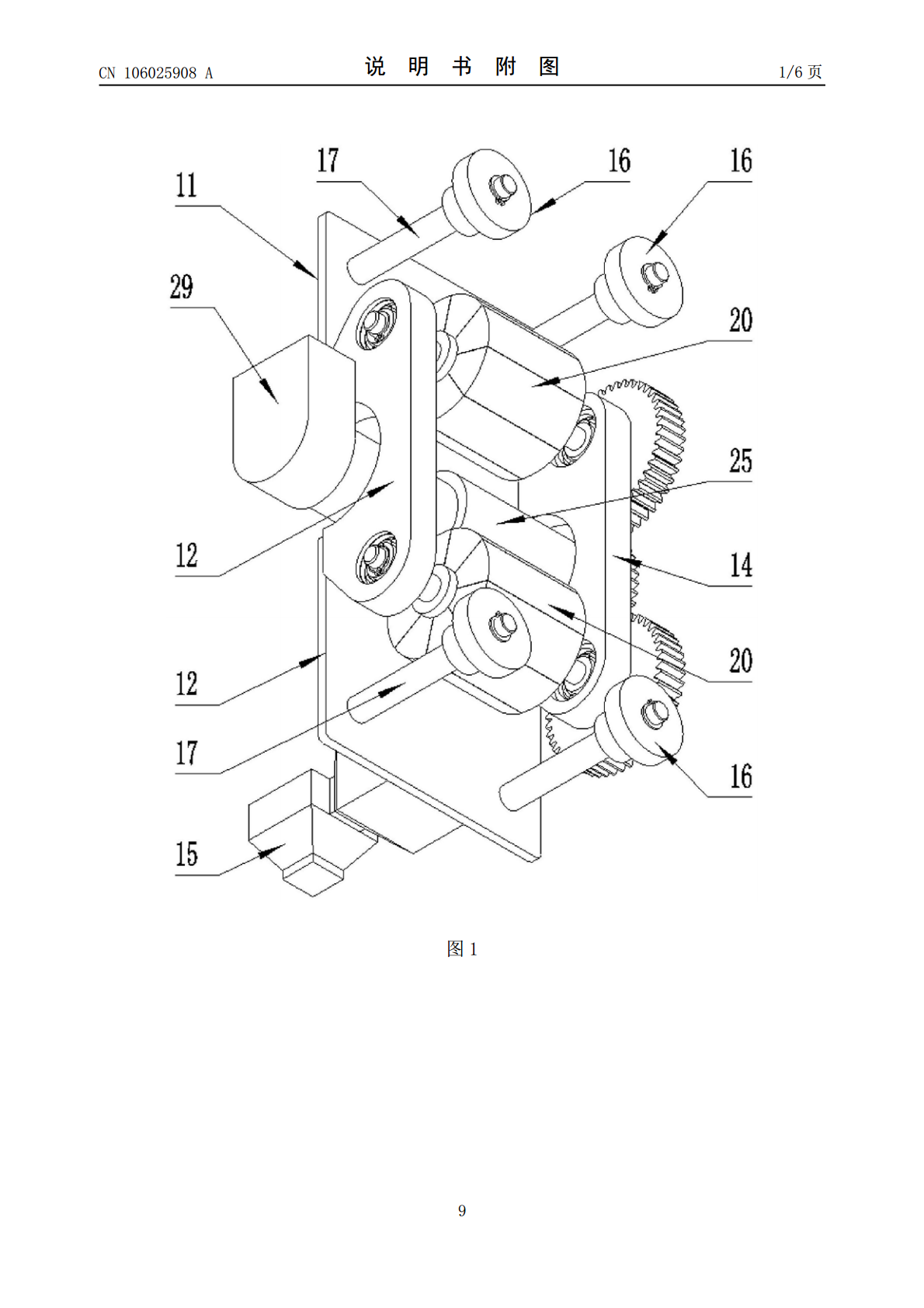
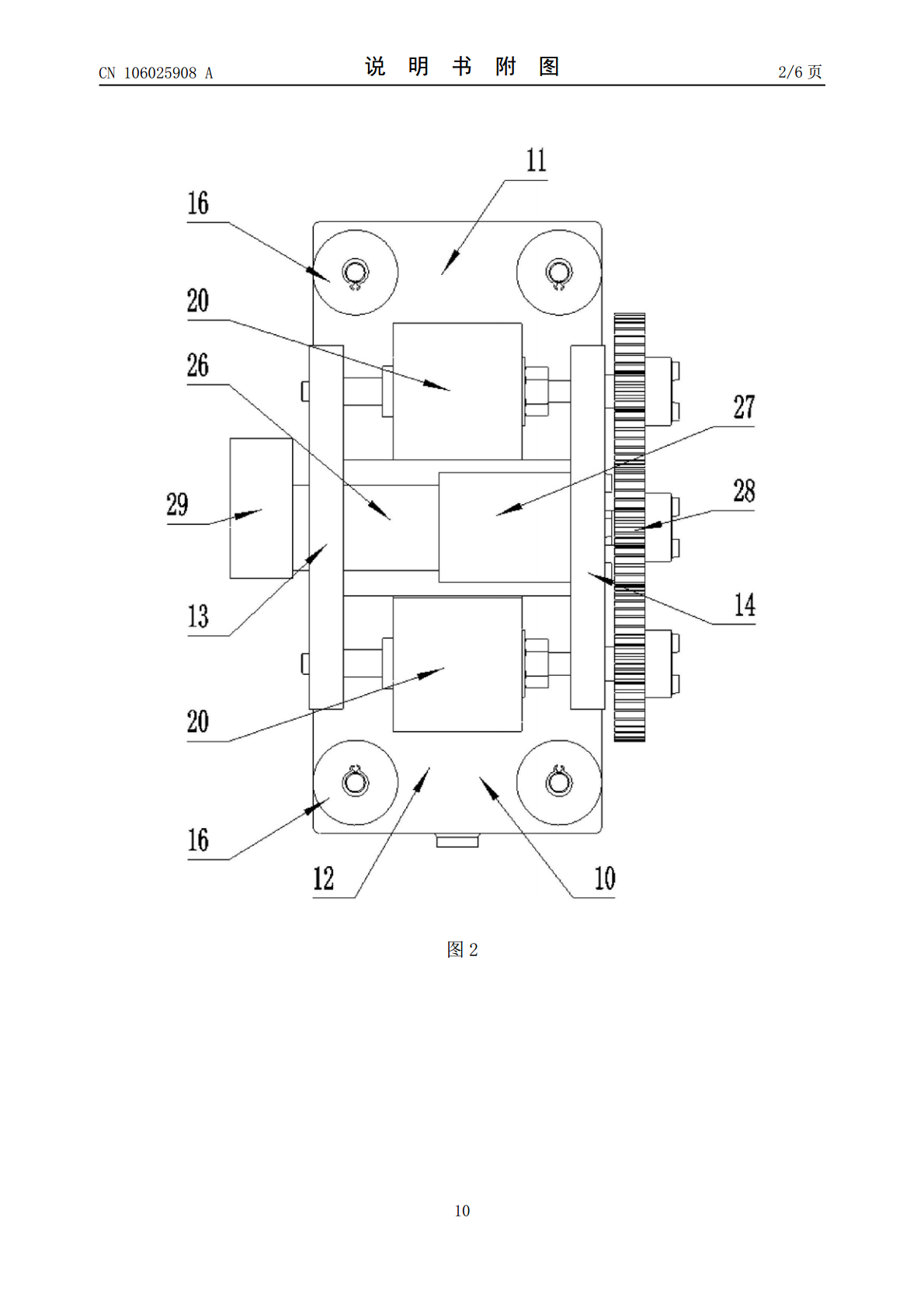
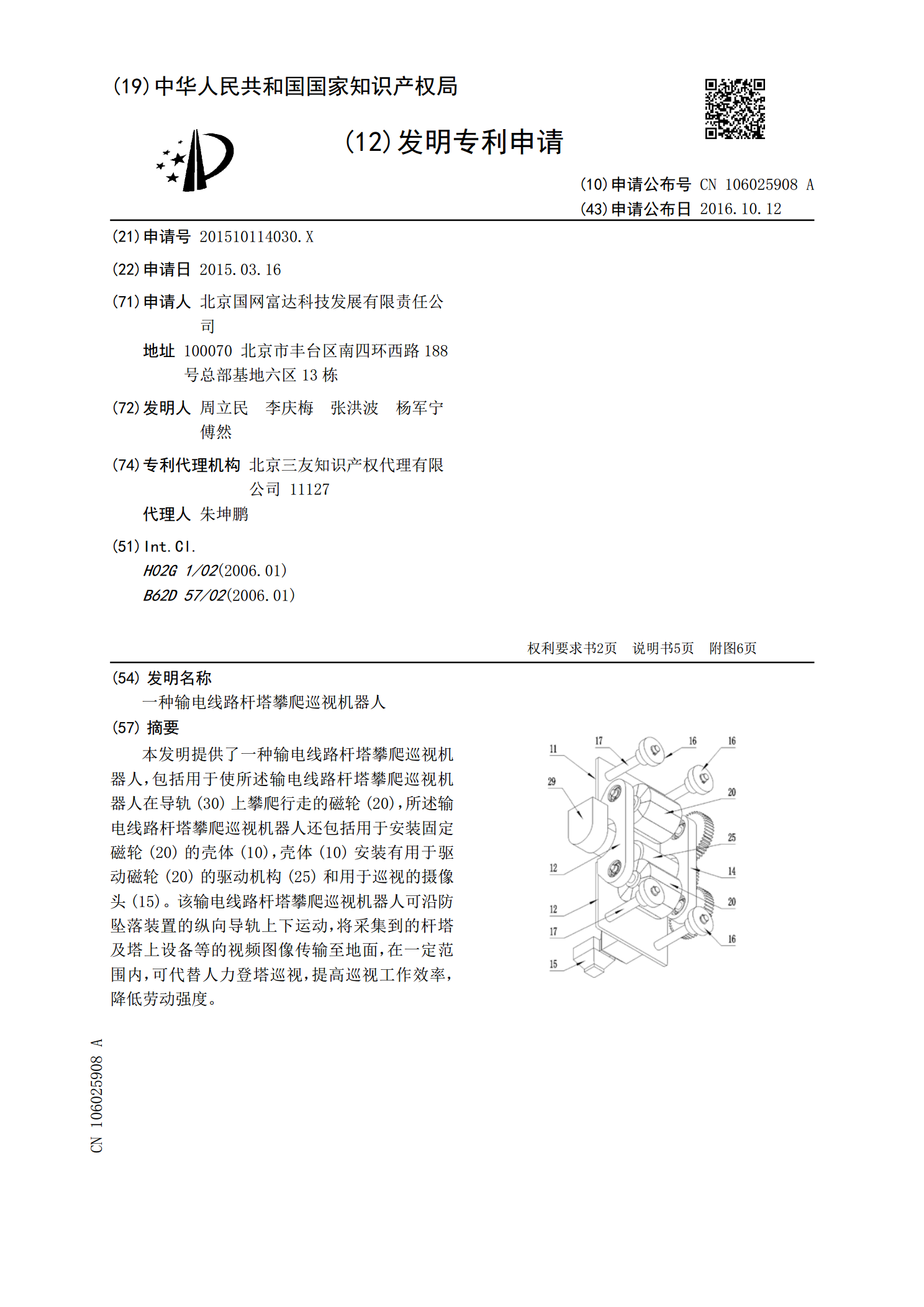
本发明提供了一种输电线路杆塔攀爬巡视机器人,包括用于使所述输电线路杆塔攀爬巡视机器人在导轨(30)上攀爬行走的磁轮(20),所述输电线路杆塔攀爬巡视机器人还包括用于安装固定磁轮(20)的壳体(10),壳体(10)安装有用于驱动磁轮(20)的驱动机构(25)和用于巡视的摄像头(15)。该输电线路杆塔攀爬巡视机器人可沿防坠落装置的纵向导轨上下运动,将采集到的杆塔及塔上设备等的视频图像传输至地面,在一定范围内,可代替人力登塔巡视,提高巡视工作效率,降低劳动强度。
一种输电线路杆塔攀爬巡视车.pdf
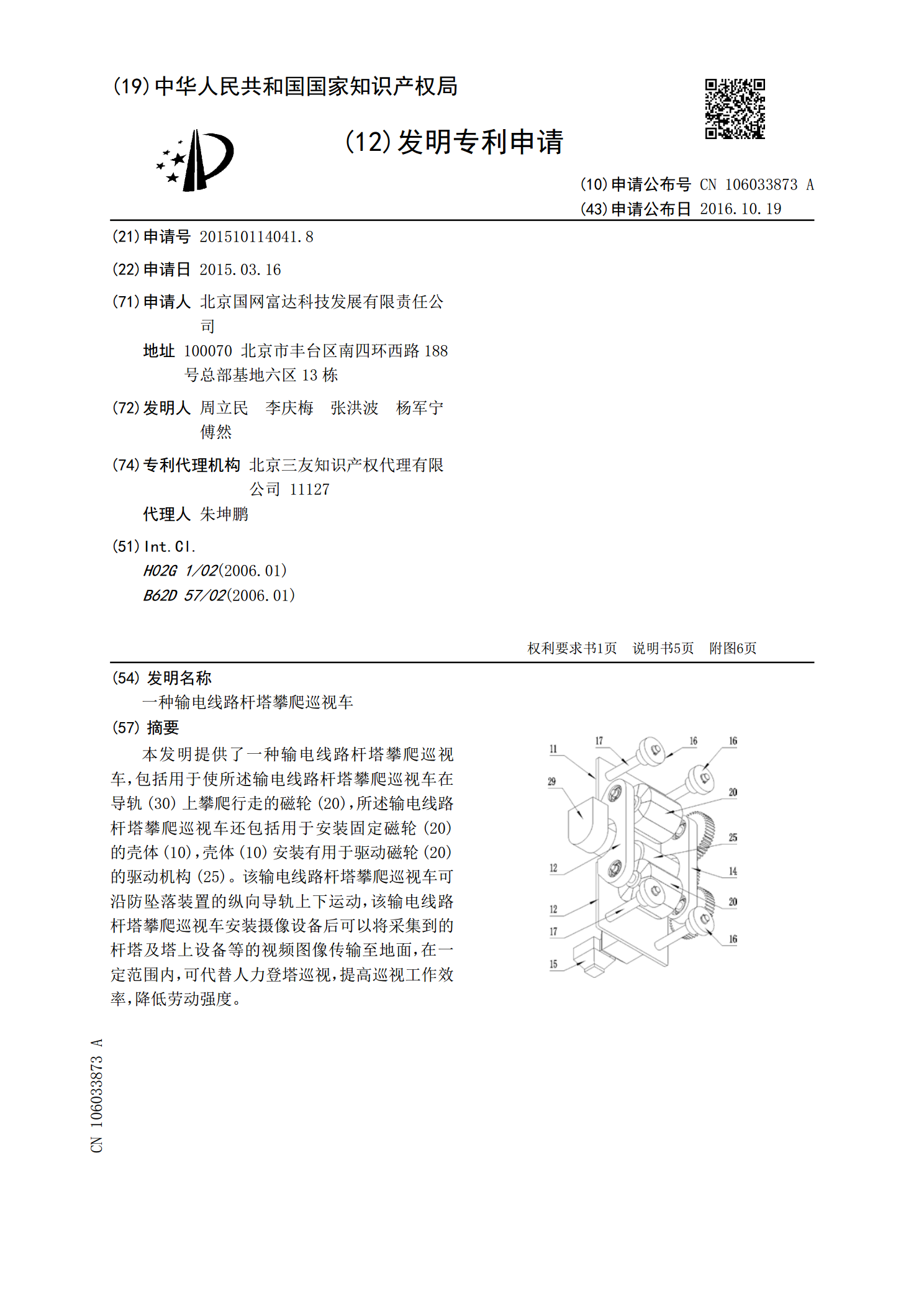
本发明提供了一种输电线路杆塔攀爬巡视车,包括用于使所述输电线路杆塔攀爬巡视车在导轨(30)上攀爬行走的磁轮(20),所述输电线路杆塔攀爬巡视车还包括用于安装固定磁轮(20)的壳体(10),壳体(10)安装有用于驱动磁轮(20)的驱动机构(25)。该输电线路杆塔攀爬巡视车可沿防坠落装置的纵向导轨上下运动,该输电线路杆塔攀爬巡视车安装摄像设备后可以将采集到的杆塔及塔上设备等的视频图像传输至地面,在一定范围内,可代替人力登塔巡视,提高巡视工作效率,降低劳动强度。

一种输电线路杆塔攀爬设备.pdf
本发明公开一种输电线路杆塔攀爬设备,涉及输电线路巡检技术领域,包括导轨、动力平台和承载平台;导轨安装于输电线路杆塔上;动力平台包括电控箱、主体结构和运动执行部件,主体结构与导轨滑动连接,运动执行部件用于为主体结构沿导轨移动提供动力,电控箱与运动执行部件电性连接;承载平台包括承载架和厢体,承载架可拆卸安装于主体结构上,以随主体结构沿导轨移动,厢体内用于装载检修人员和/或检修设备。本发明结构设计合理,线路检修人员可乘坐该设备进行杆塔运维检修作业,减少了检修人员登塔的体力消耗,可使检修人员保留更多体力来进行塔上
输电杆塔攀爬机器人夹持装置及其机器人.pdf
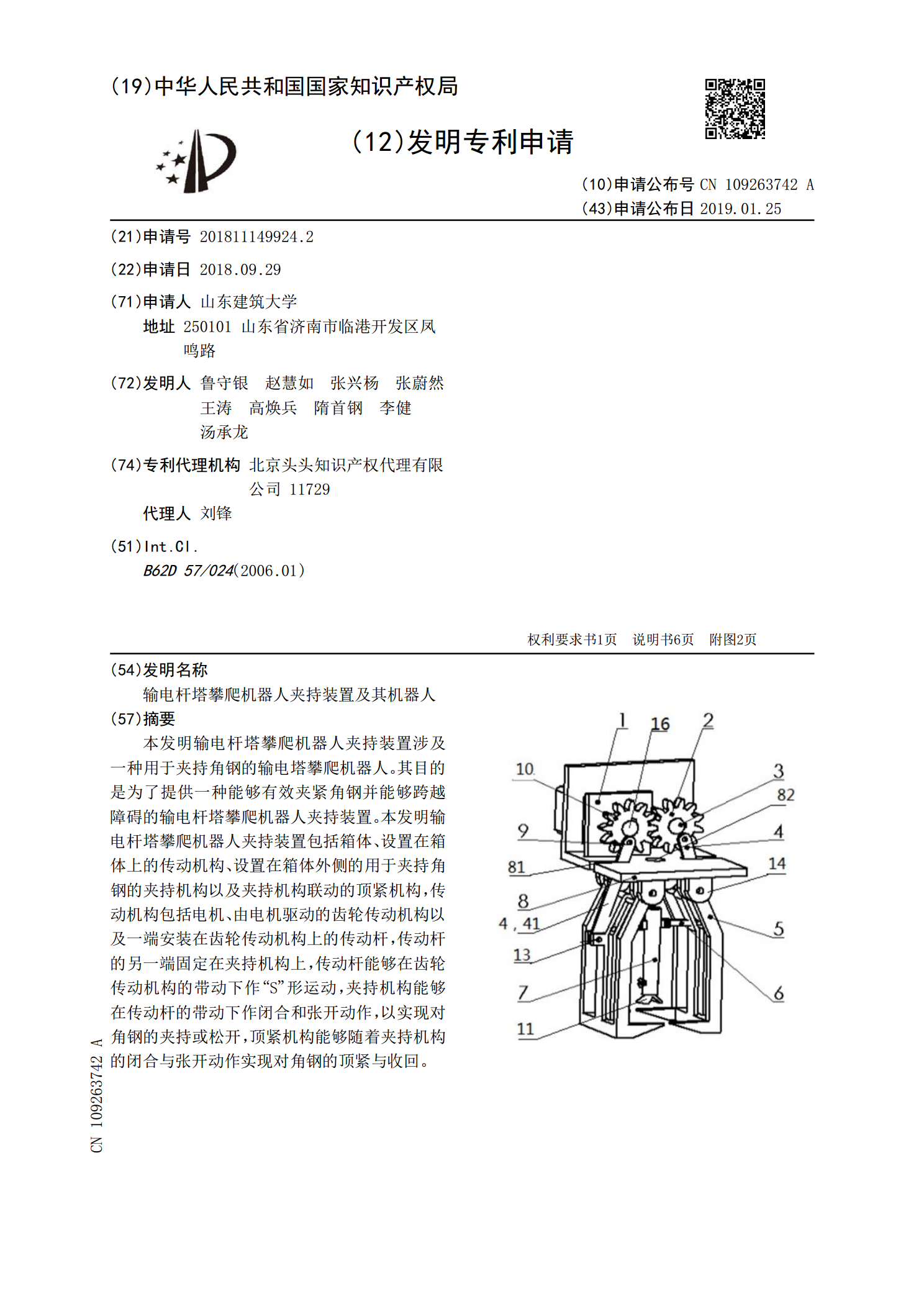
本发明输电杆塔攀爬机器人夹持装置涉及一种用于夹持角钢的输电塔攀爬机器人。其目的是为了提供一种能够有效夹紧角钢并能够跨越障碍的输电杆塔攀爬机器人夹持装置。本发明输电杆塔攀爬机器人夹持装置包括箱体、设置在箱体上的传动机构、设置在箱体外侧的用于夹持角钢的夹持机构以及夹持机构联动的顶紧机构,传动机构包括电机、由电机驱动的齿轮传动机构以及一端安装在齿轮传动机构上的传动杆,传动杆的另一端固定在夹持机构上,传动杆能够在齿轮传动机构的带动下作“S”形运动,夹持机构能够在传动杆的带动下作闭合和张开动作,以实现对角钢的夹持或

一种杆塔导轨用磁力行走轮和输电线路登塔巡视机器人.pdf
本发明提供了一种杆塔导轨用磁力行走轮和输电线路登塔巡视机器人,该杆塔导轨用磁力行走轮包括转轴(10)和磁轮(20),磁轮(20)含有轮套(21)和磁体(22),轮套(21)套设于转轴(10)外,磁体(22)设置于轮套(21)和转轴(10)之间,轮套(21)相对于转轴(10)固定。该杆塔导轨用磁力行走轮能够依靠磁引力吸附在导轨上平面产生摩擦力,进而借助动力源克服重力做功,从而解决了自动化检查设备的登塔问题。