
一种基于四自由度的脚部医疗保健按摩机器人.pdf

邻家****66


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于四自由度的脚部医疗保健按摩机器人.pdf
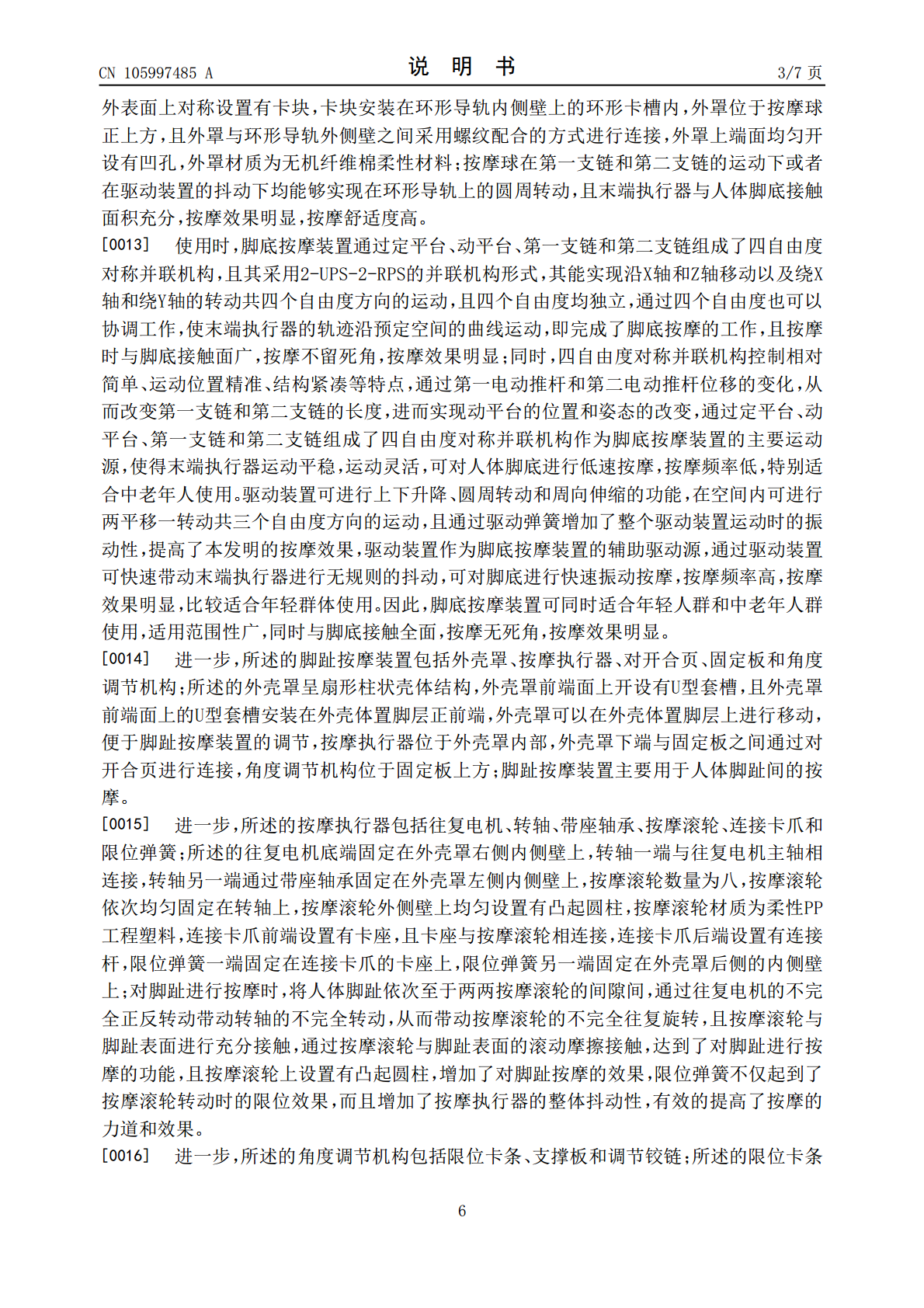
本发明涉及一种基于四自由度的脚部医疗保健按摩机器人,包括外壳体、脚底按摩装置、脚趾按摩装置、套筒、调节螺杆、导块、直线导轨和行走轮,脚底按摩装置分别均匀对称安装在外壳体下端的安装层内,脚趾按摩装置位于外壳体正前方,套筒分别对称固定在外壳体外侧壁上,导块安装在直线导轨内,直线导轨两端分别固定在外壳体底端面上,行走轮分别安装在外壳体下方的四个顶角处。本发明可对人体脚部的脚底和脚趾进行同步按摩,按摩全面性高,克服了普通脚部按摩器械只能对脚部某一部位进行的局限;且脚底按摩装置同时具有两种不同的按摩频率,可同时适合
一种脚部按摩智能机器人专用脚趾按摩装置.pdf
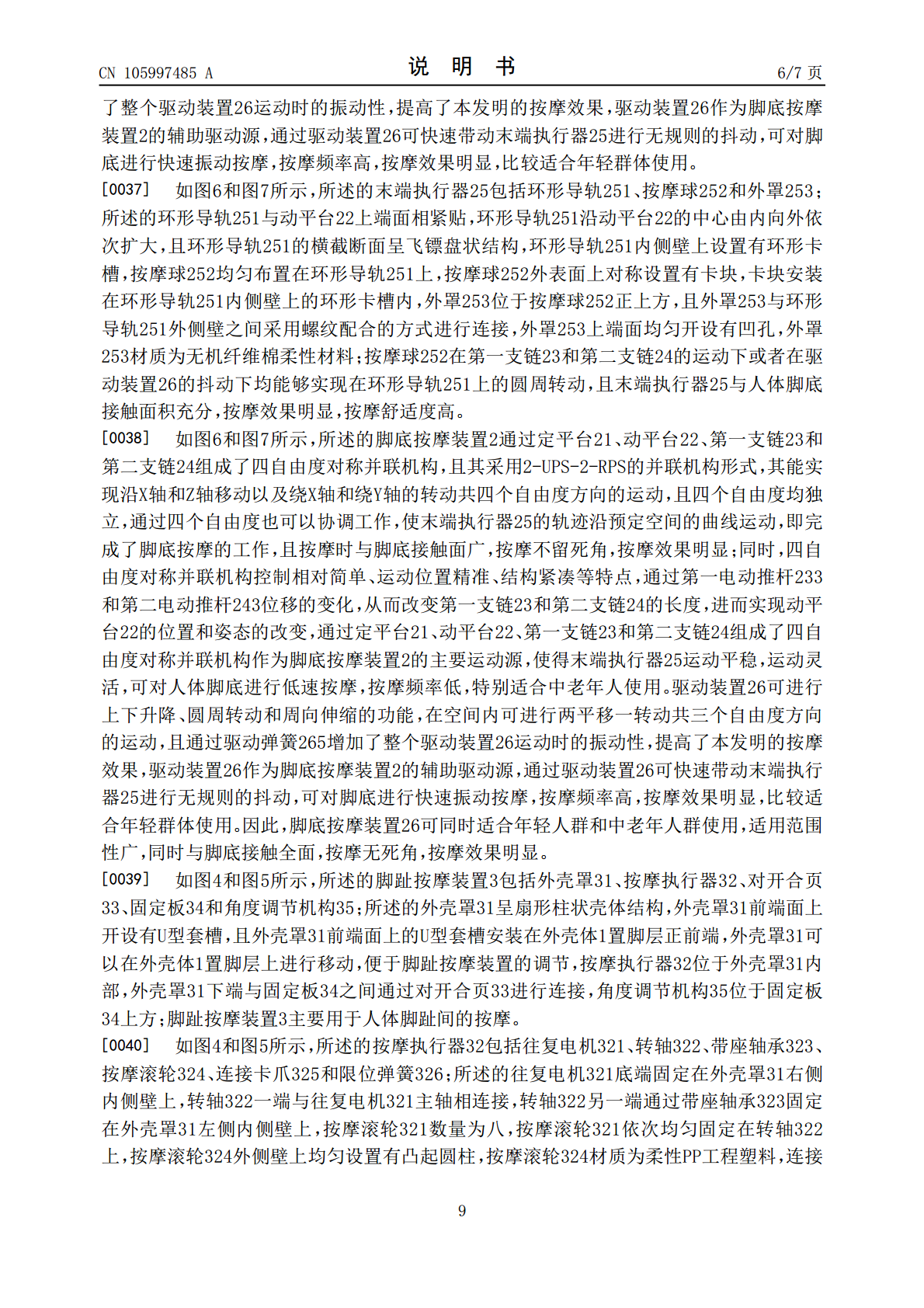
本发明涉及一种脚部按摩智能机器人专用脚趾按摩装置,包括外壳罩、按摩执行器、对开合页、固定板和角度调节机构;所述的外壳罩呈扇形柱状壳体结构,外壳罩前端面上开设有U型套槽,按摩执行器位于外壳罩内部,外壳罩下端与固定板之间通过对开合页进行连接,角度调节机构位于固定板上方。本发明可与脚趾表面充分接触,采用滚动式方式按摩,按摩效果好,且其整体角度可调,便于脚趾的放置以及不同姿势时的按摩,设计更加人性化和实用化。

一种按摩智能机器人专用四自由度脚底按摩装置.pdf
本发明涉及一种按摩智能机器人专用四自由度脚底按摩装置,包括定平台、动平台、第一支链、第二支链、末端执行器和驱动装置,动平台位于定平台正上方,第一支链和第二支链的数量均为二,第一支链和第二支链均位于定平台和动平台之间,第一支链和第二支链的两端均分别与定平台和动平台相连接,且第一支链和第二支链的水平安装角度为90度,末端执行器位于动平台正上方,驱动装置位于定平台和动平台之间,且驱动装置与定平台上端面相固定。本发明同时具有两种不同的按摩频率,可同时适合年轻人群和中老年人群使用,适用范围性广,同时与脚底接触全面,
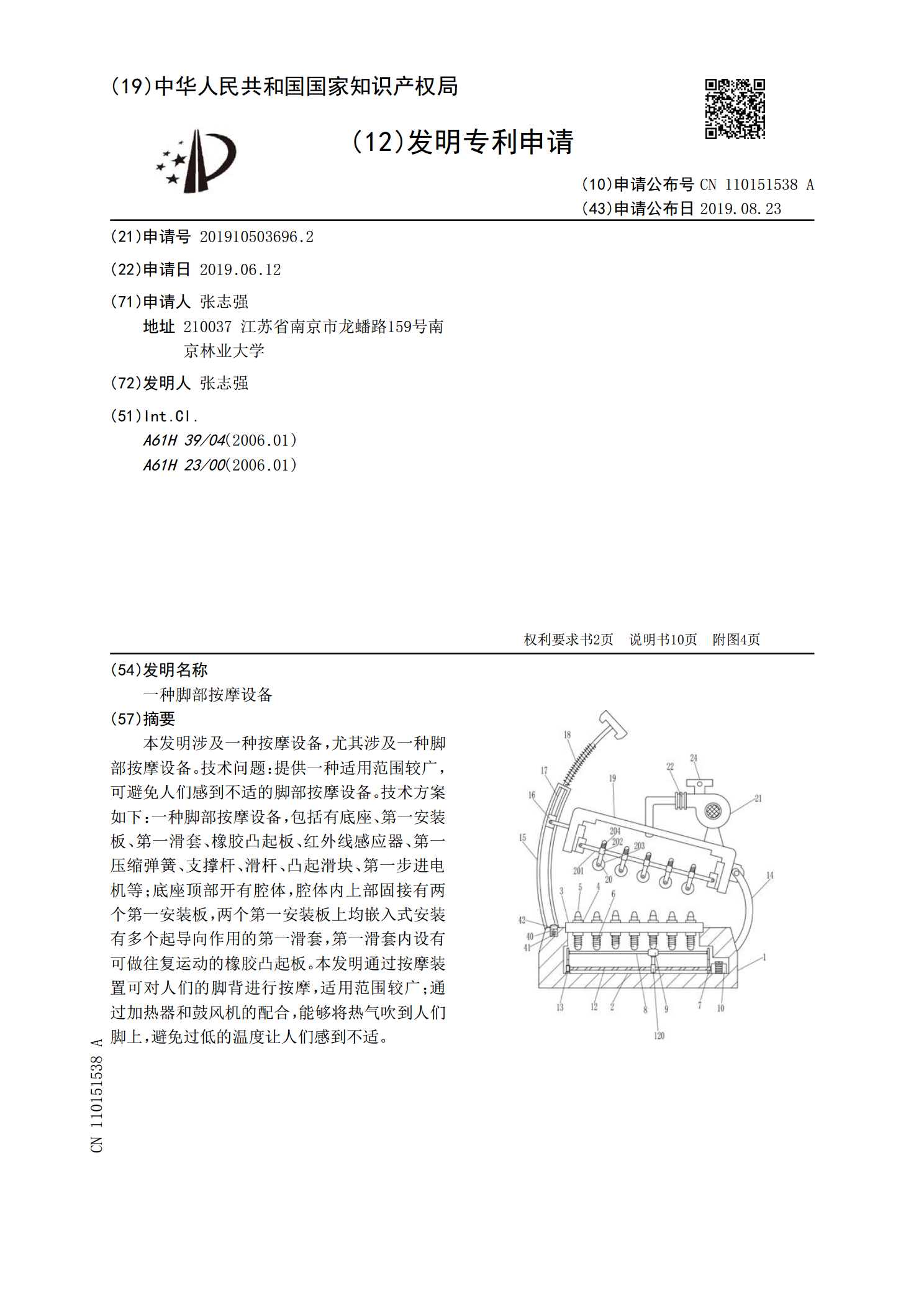
一种脚部按摩设备.pdf
本发明涉及一种按摩设备,尤其涉及一种脚部按摩设备。技术问题:提供一种适用范围较广,可避免人们感到不适的脚部按摩设备。技术方案如下:一种脚部按摩设备,包括有底座、第一安装板、第一滑套、橡胶凸起板、红外线感应器、第一压缩弹簧、支撑杆、滑杆、凸起滑块、第一步进电机等;底座顶部开有腔体,腔体内上部固接有两个第一安装板,两个第一安装板上均嵌入式安装有多个起导向作用的第一滑套,第一滑套内设有可做往复运动的橡胶凸起板。本发明通过按摩装置可对人们的脚背进行按摩,适用范围较广;通过加热器和鼓风机的配合,能够将热气吹到人们脚
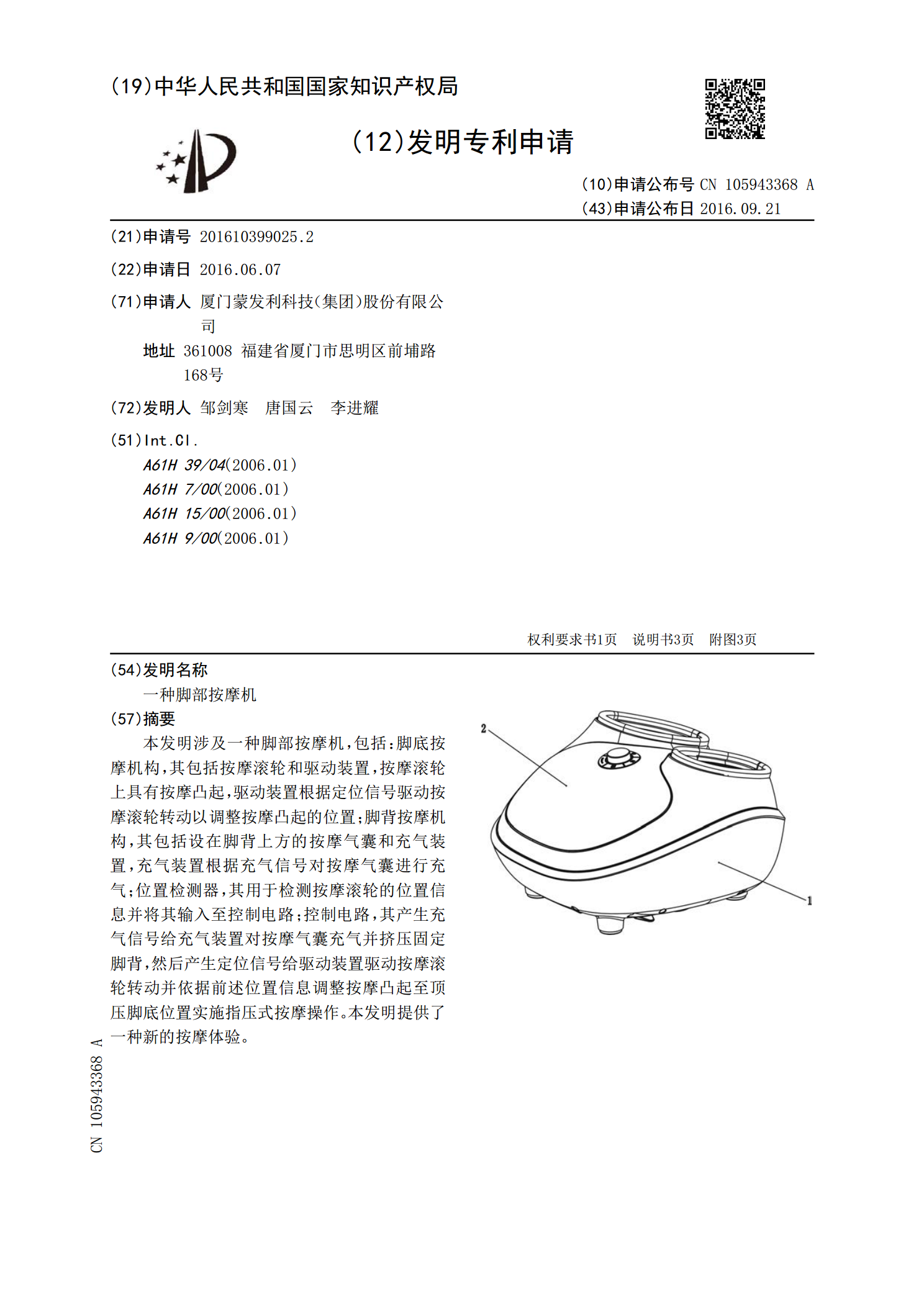
一种脚部按摩机.pdf
本发明涉及一种脚部按摩机,包括:脚底按摩机构,其包括按摩滚轮和驱动装置,按摩滚轮上具有按摩凸起,驱动装置根据定位信号驱动按摩滚轮转动以调整按摩凸起的位置;脚背按摩机构,其包括设在脚背上方的按摩气囊和充气装置,充气装置根据充气信号对按摩气囊进行充气;位置检测器,其用于检测按摩滚轮的位置信息并将其输入至控制电路;控制电路,其产生充气信号给充气装置对按摩气囊充气并挤压固定脚背,然后产生定位信号给驱动装置驱动按摩滚轮转动并依据前述位置信息调整按摩凸起至顶压脚底位置实施指压式按摩操作。本发明提供了一种新的按摩体验。