
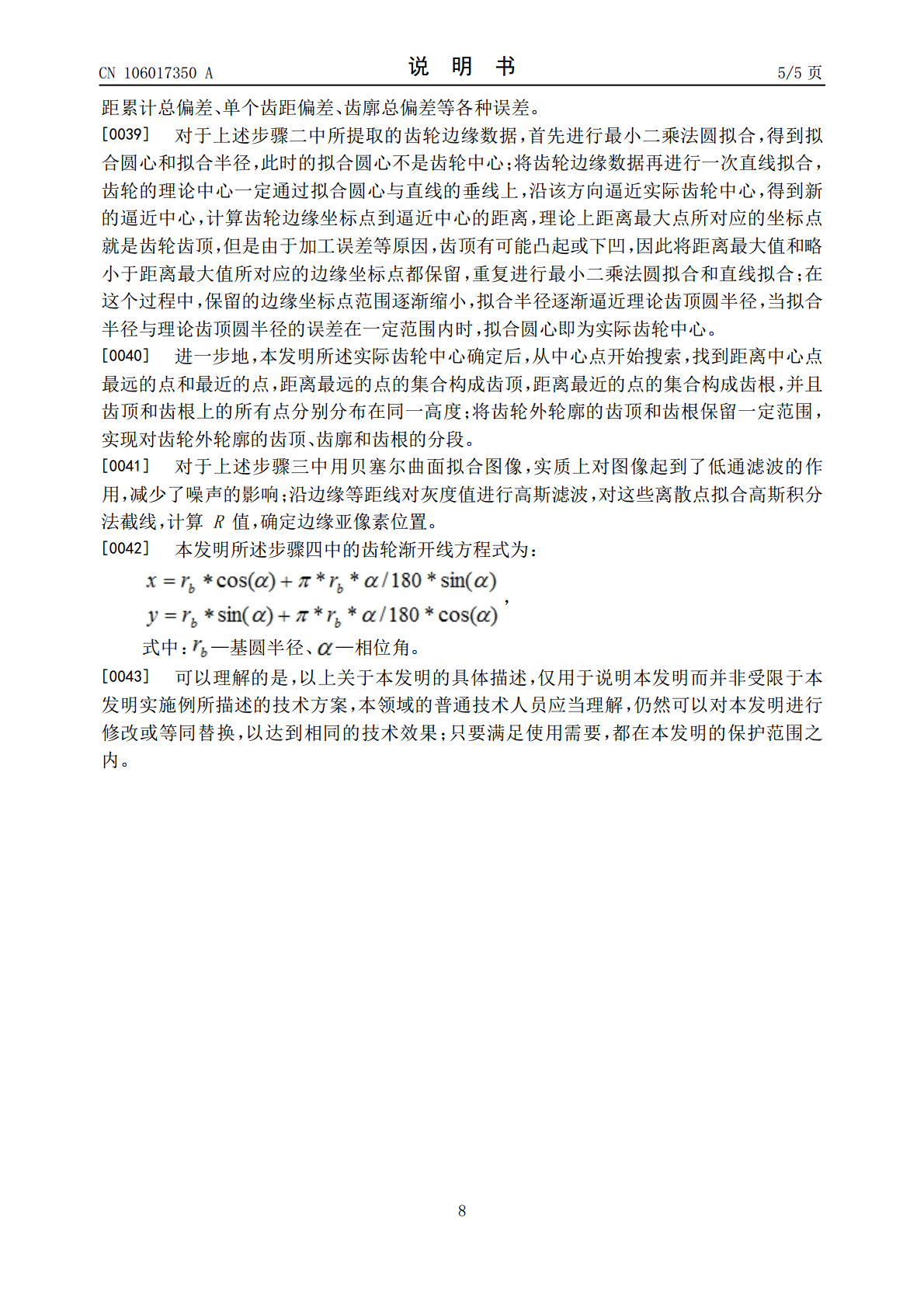
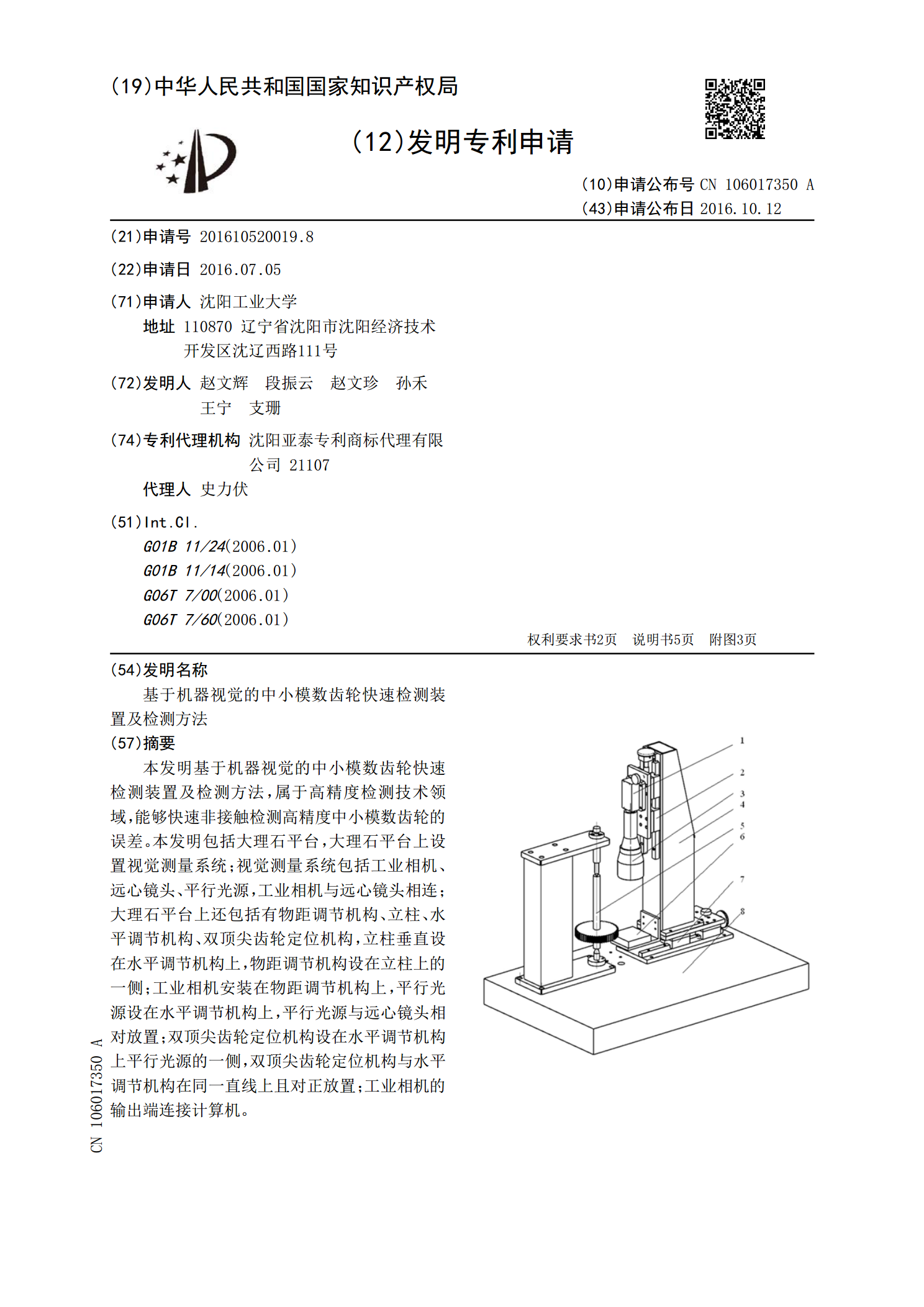
基于机器视觉的中小模数齿轮快速检测装置及检测方法.pdf

明轩****la


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器视觉的中小模数齿轮快速检测装置及检测方法.pdf
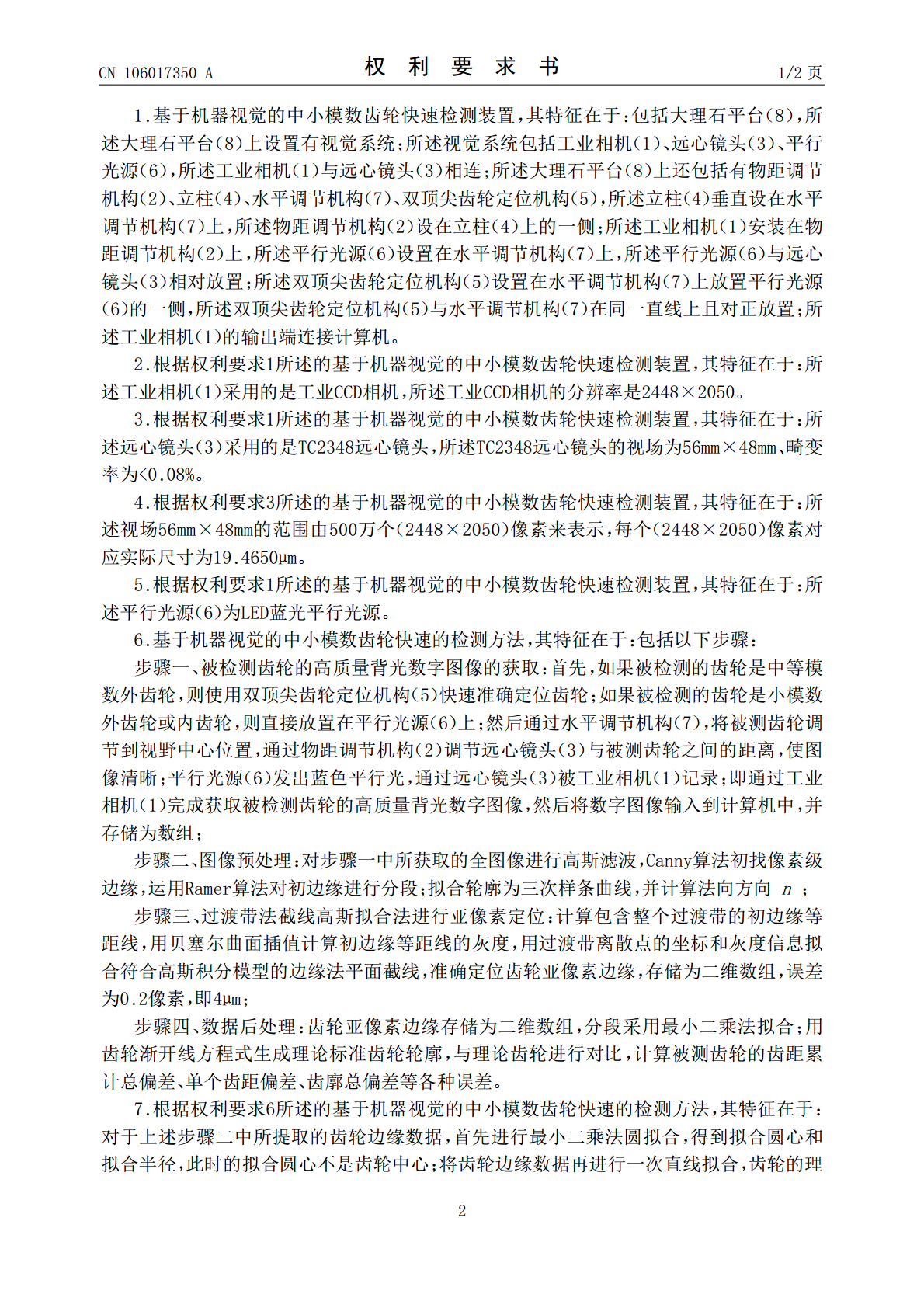
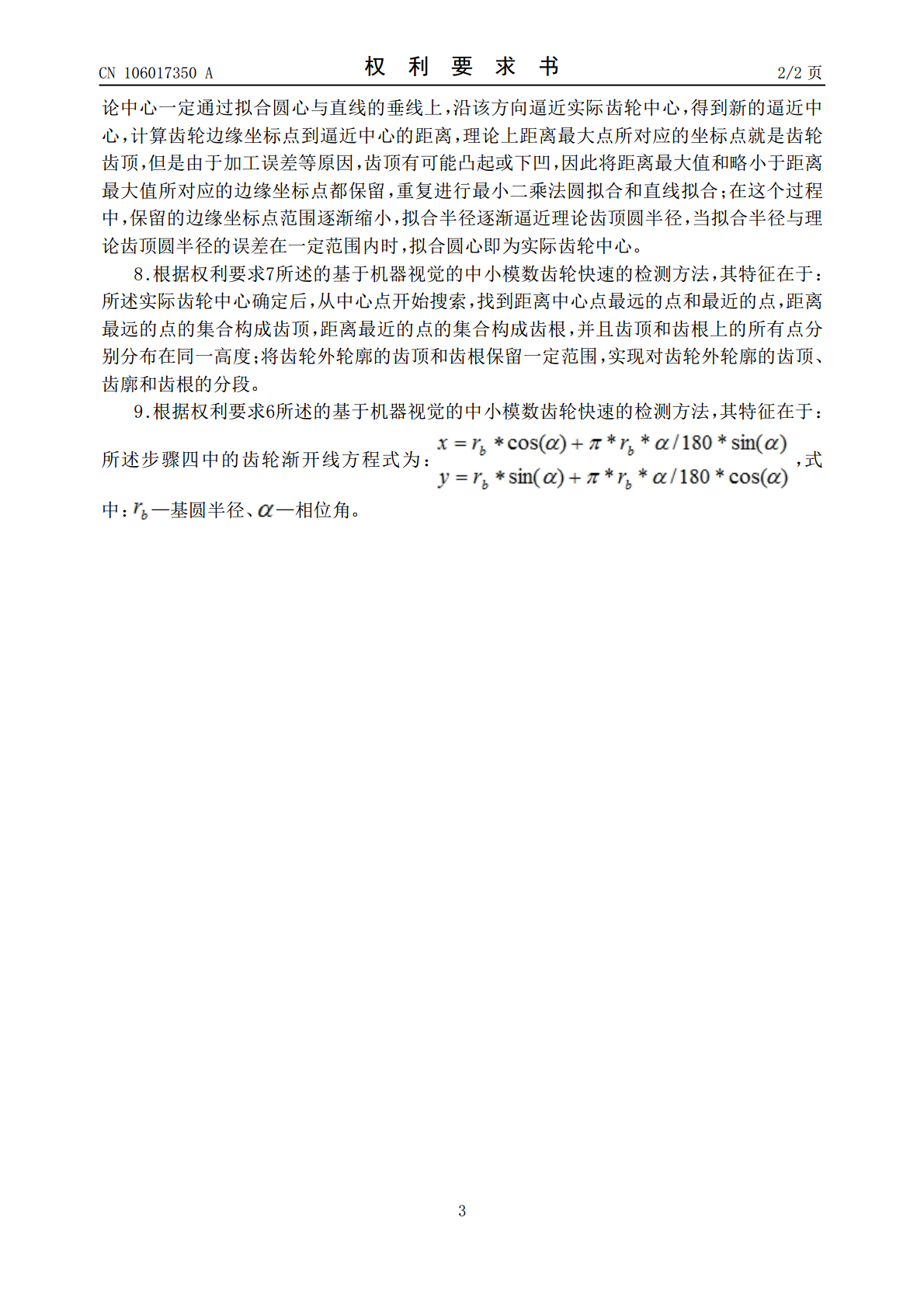
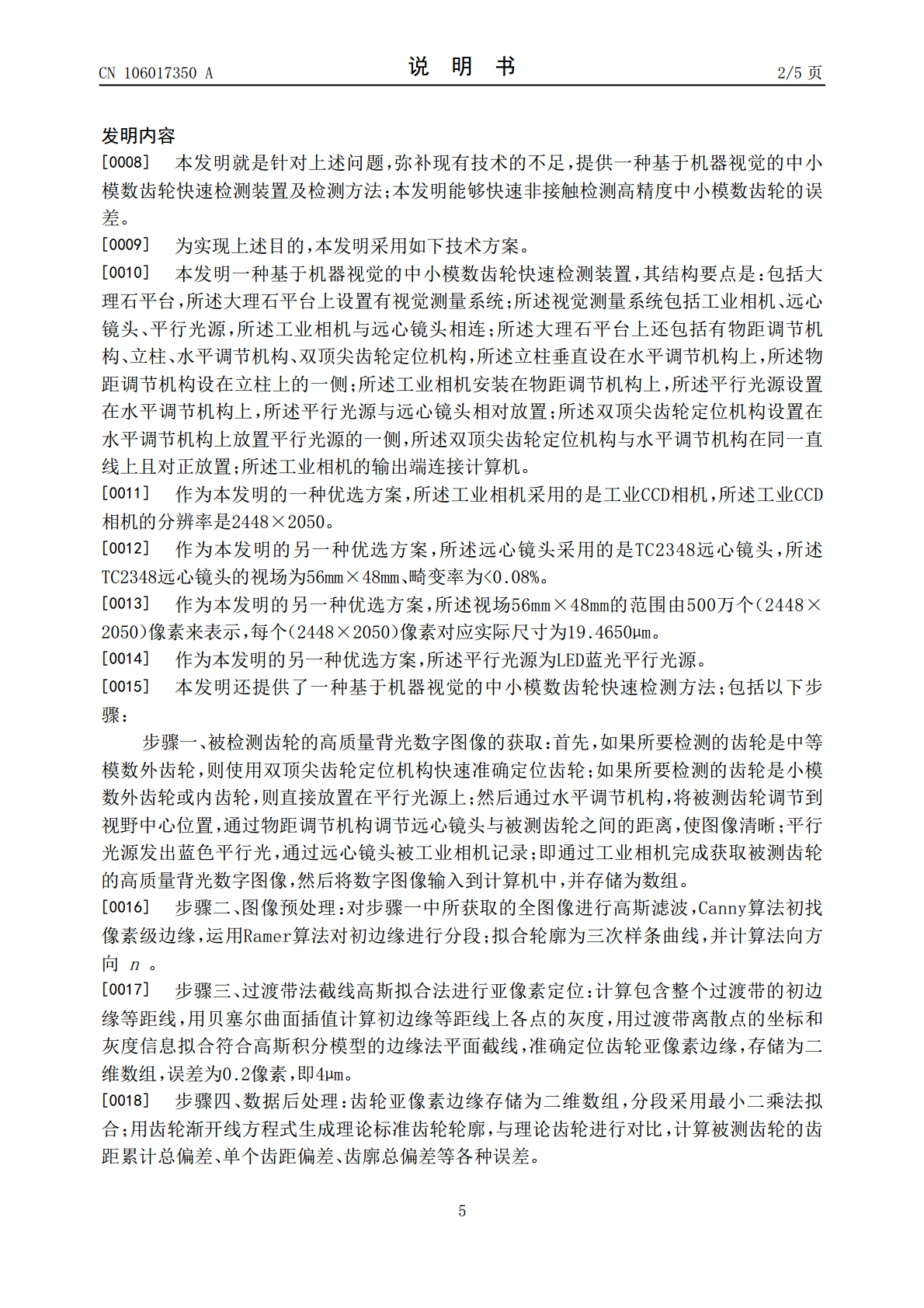
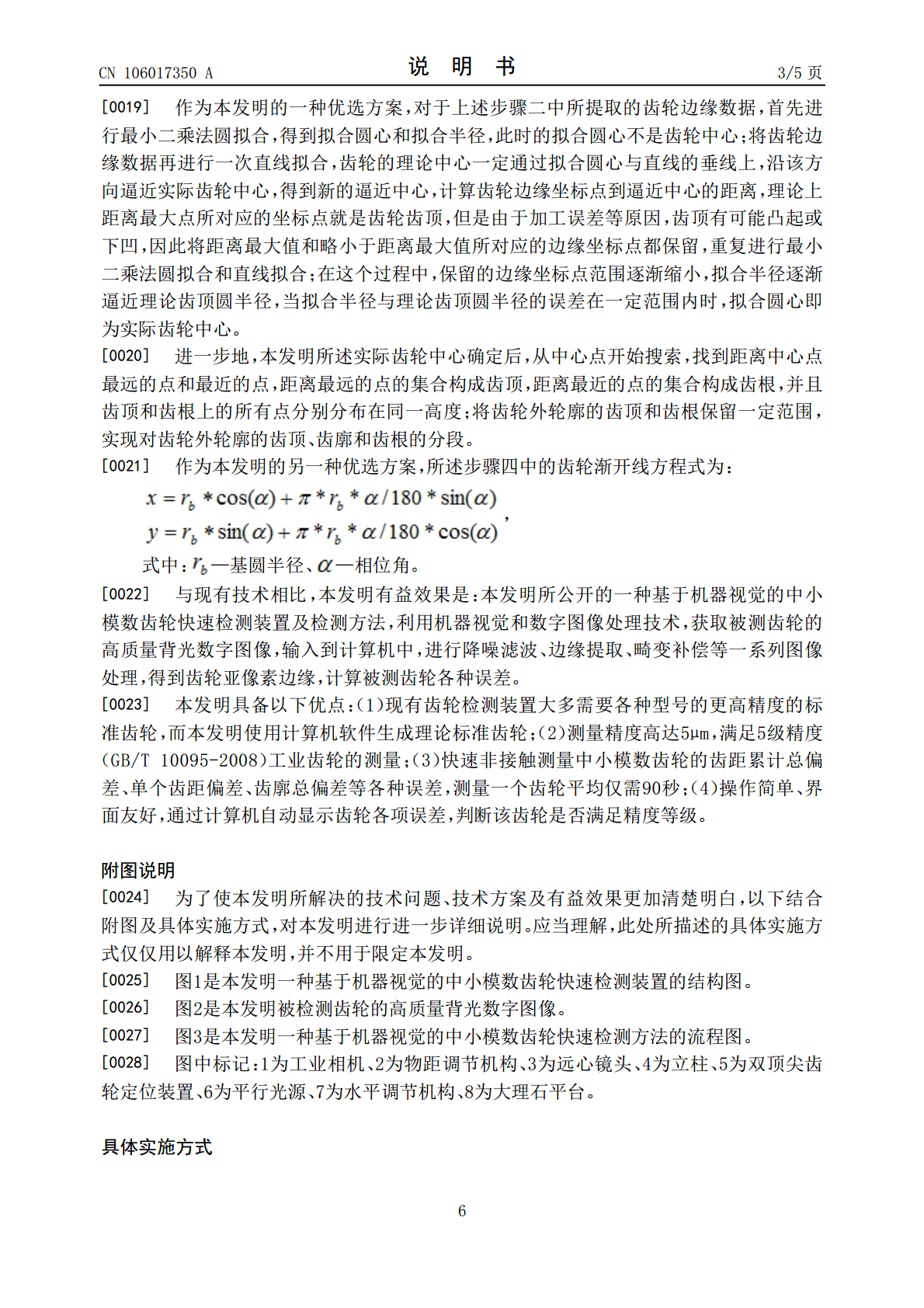
本发明基于机器视觉的中小模数齿轮快速检测装置及检测方法,属于高精度检测技术领域,能够快速非接触检测高精度中小模数齿轮的误差。本发明包括大理石平台,大理石平台上设置视觉测量系统;视觉测量系统包括工业相机、远心镜头、平行光源,工业相机与远心镜头相连;大理石平台上还包括有物距调节机构、立柱、水平调节机构、双顶尖齿轮定位机构,立柱垂直设在水平调节机构上,物距调节机构设在立柱上的一侧;工业相机安装在物距调节机构上,平行光源设在水平调节机构上,平行光源与远心镜头相对放置;双顶尖齿轮定位机构设在水平调节机构上平行光源的
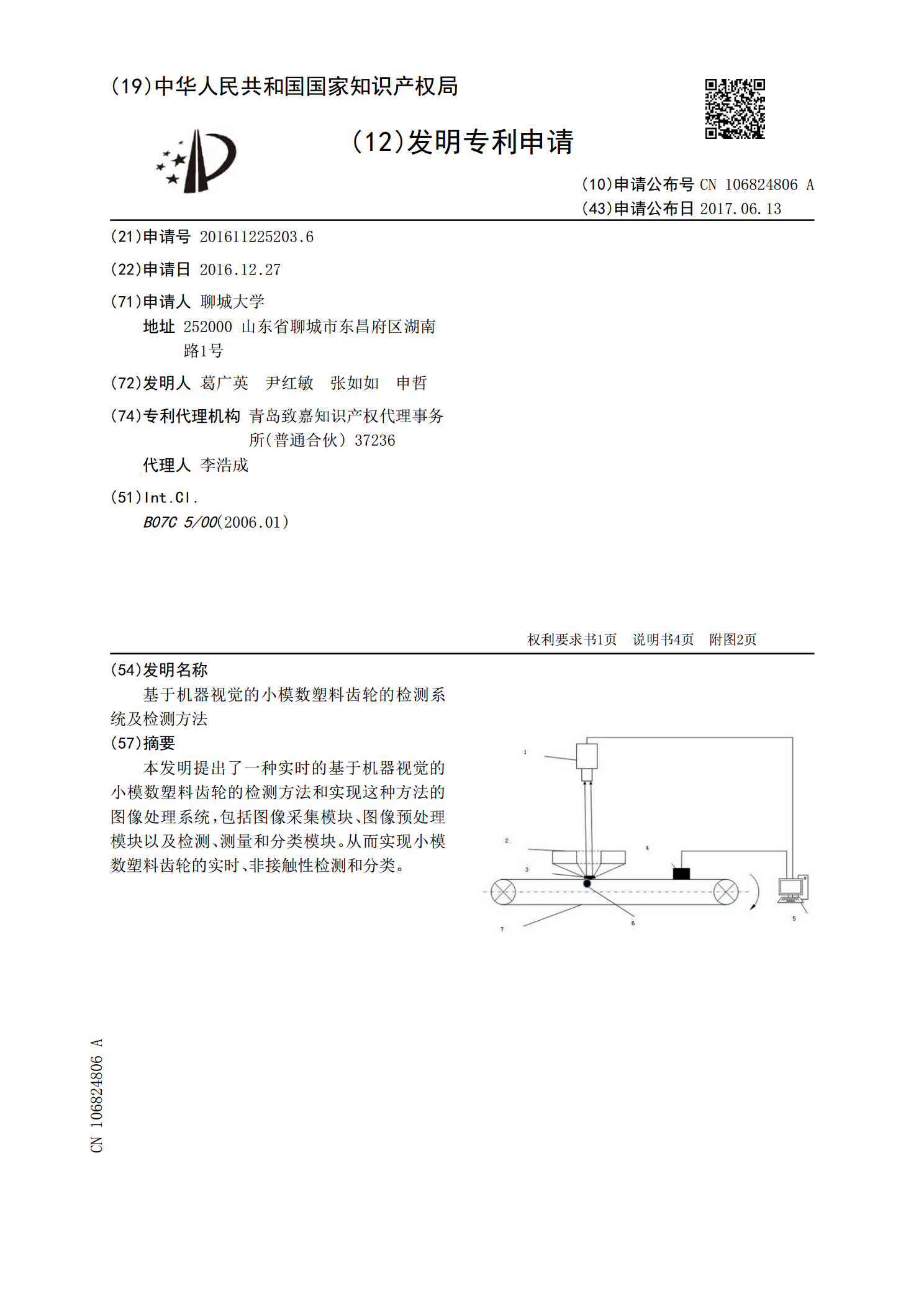
基于机器视觉的小模数塑料齿轮的检测系统及检测方法.pdf
本发明提出了一种实时的基于机器视觉的小模数塑料齿轮的检测方法和实现这种方法的图像处理系统,包括图像采集模块、图像预处理模块以及检测、测量和分类模块。从而实现小模数塑料齿轮的实时、非接触性检测和分类。

基于机器视觉的缺陷快速检测方法及装置、设备、存储介质.pdf
本发明属于机器视觉技术领域,公开了一种基于机器视觉的缺陷快速检测方法及装置、设备、存储介质,方法包括将待检测图像划分成若干图像子块;计算每个图像子块的多个相位一致性值,并求每个图像子块的多个相位一致性值的平均值;将平均值较大的指定数量个图像子块作为缺陷子块。该检测方法通过计算图像的相位一致性来检测图像中的边缘,可以不受图像局部光线明暗变化的影响,并能包含图像中的角、线、纹理等信息,尤其在图像边缘对比度比较低时保留边缘信息,从而对图像的亮度、对比度不敏感,可以很好的克服光线明暗所带来的纹理结构影响,进而可以

基于机器视觉的小模数齿轮检测过程中图像拼接的方法.pdf
本发明公开了一种基于机器视觉的小模数齿轮检测过程中图像拼接的方法。该方法是使用二维精密运动平台实现图像的分步采集,并将二维运动平台上光栅的位置反馈信号发送给计算机,通过计算机中来修正运动过程中产生的误差,实现图像拼接。本发明解决了现有图像拼接技术中获取图像特征匹配结构的困难,提高了检测速度,具有较高的精度。
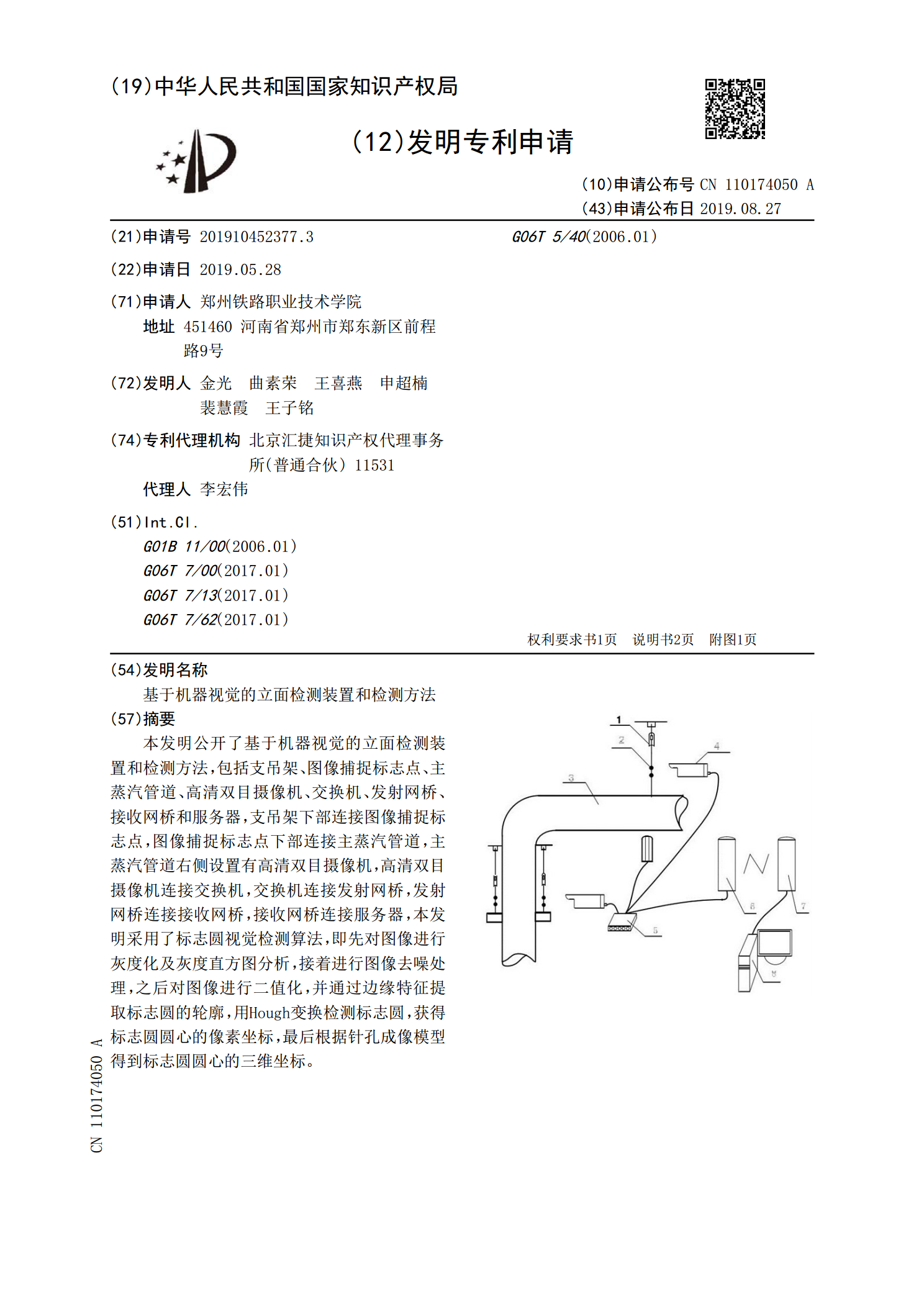
基于机器视觉的立面检测装置和检测方法.pdf
本发明公开了基于机器视觉的立面检测装置和检测方法,包括支吊架、图像捕捉标志点、主蒸汽管道、高清双目摄像机、交换机、发射网桥、接收网桥和服务器,支吊架下部连接图像捕捉标志点,图像捕捉标志点下部连接主蒸汽管道,主蒸汽管道右侧设置有高清双目摄像机,高清双目摄像机连接交换机,交换机连接发射网桥,发射网桥连接接收网桥,接收网桥连接服务器,本发明采用了标志圆视觉检测算法,即先对图像进行灰度化及灰度直方图分析,接着进行图像去噪处理,之后对图像进行二值化,并通过边缘特征提取标志圆的轮廓,用Hough变换检测标志圆,获得标