
一种具有交叉滚子轴承的RV减速器.pdf

慧娇****文章

1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有交叉滚子轴承的RV减速器.pdf
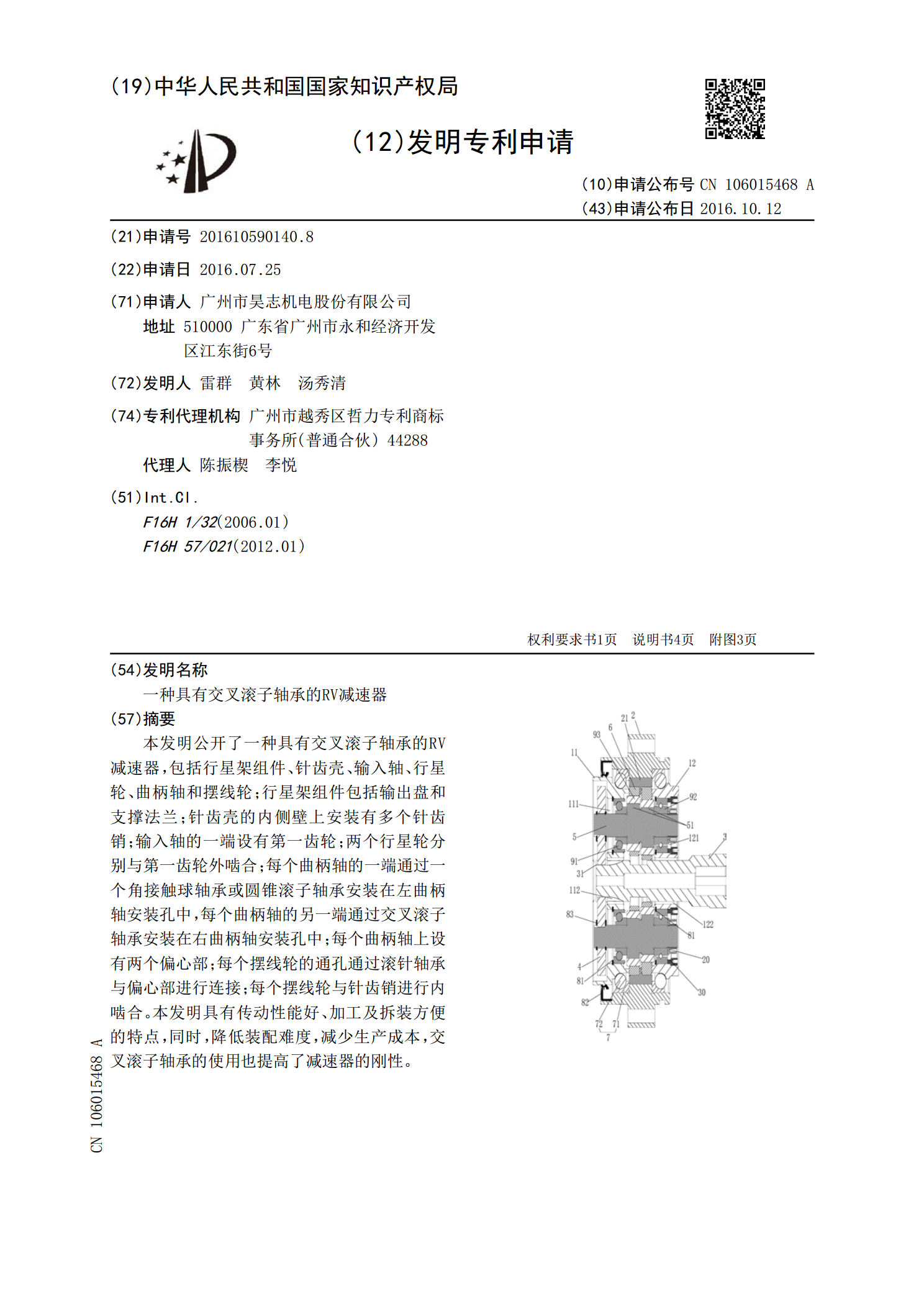
本发明公开了一种具有交叉滚子轴承的RV减速器,包括行星架组件、针齿壳、输入轴、行星轮、曲柄轴和摆线轮;行星架组件包括输出盘和支撑法兰;针齿壳的内侧壁上安装有多个针齿销;输入轴的一端设有第一齿轮;两个行星轮分别与第一齿轮外啮合;每个曲柄轴的一端通过一个角接触球轴承或圆锥滚子轴承安装在左曲柄轴安装孔中,每个曲柄轴的另一端通过交叉滚子轴承安装在右曲柄轴安装孔中;每个曲柄轴上设有两个偏心部;每个摆线轮的通孔通过滚针轴承与偏心部进行连接;每个摆线轮与针齿销进行内啮合。本发明具有传动性能好、加工及拆装方便的特点,同时

单列交叉滚子轴承谐波减速器.pdf
?本发明是一种独创性的交叉滚子轴承谐波减速器。其组成:波发生器(7)装置于电机(1)轴上,并且由平键(2)将波发生器(7)与电机(1)连接,电机(1)安装在法兰盘(3)上,法兰盘(3)通过螺栓(12)与刚性齿轮(9)连接,刚性齿轮(9)通过螺栓(10)与交叉滚子轴承外圈(4)连接,柔性齿轮(8)通过螺栓(11)与交叉滚子轴承内圈(6)连接;轴承滚子(5)安装在交叉滚子轴承外圈(4)和交叉滚子轴承内圈(6)之间,柔性齿轮(8)安装在波发生器(7)和刚性齿轮(9)之间。电机(1)的轴带动波发生器(7)转动,柔

交叉球面滚子轴承.pdf
本发明提供一种能够有效地降低轴承的启动力矩和正常工作的摩擦力矩的交叉球面滚子轴承,其包括外圈、内圈和滚动体,其中,外圈和内圈均设置有两列球面滚道,滚动体为球面滚子,并且通过两列球面滚道支撑两列轴线交叉为90°地间隔排列的球面滚子。

一种基于RV轴承的减速器.pdf
一种基于RV轴承的减速器,包括主轴、行星轮、曲轴、RV轴承、壳体和摆线针轮;壳体位中空筒装结构,主轴同轴设置在壳体的几何中心;三个曲轴平行于主轴等弧度设置在以主轴为中心的圆上;每个曲轴的下端均固定设置有行星轮,主轴的下端固定设置有齿轮,齿轮于所有行星轮啮合;每个曲轴上固定套设有两个RV轴承,主轴上套设有两个摆线针轮,摆线针轮位于曲轴的位置有孔,曲轴穿过孔设置,且每个曲轴上的两个RV轴承均位于摆线针轮的孔内;壳体内侧壁上设置有与摆线针轮边缘相啮合的内齿,摆线针轮组与内齿啮合。本发明采用RV减速器,使减速器调

轴承式RV减速器.pdf
本发明公开了一种轴承式RV减速器,属于减速器技术领域。包括针齿壳,针齿壳内转动有安装架,安装架设有两个通过滚针与针齿壳传动连接的摆线轮,安装架上转动安装有一动力输入轴,动力输入轴的动力输入端伸出安装架,动力输入轴上设有两个驱动偏心轮,两个驱动偏心轮分别穿过两个摆线轮的中心且与相应的摆线轮相适配;安装架上转动安装有至少两定位轴,两定位轴相对于动力输入轴的回转中心对称设置,每个定位轴上均设有两个传动偏心轮,两个传动偏心轮分别穿过两个摆线轮且与相应的摆线轮相适配。实现动力中心输入和一级减速,与传统相比,减少了动