
列车轮对踏面三维轮廓自动化测量方法和系统.pdf

悠柔****找我


1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
列车轮对踏面三维轮廓自动化测量方法和系统.pdf
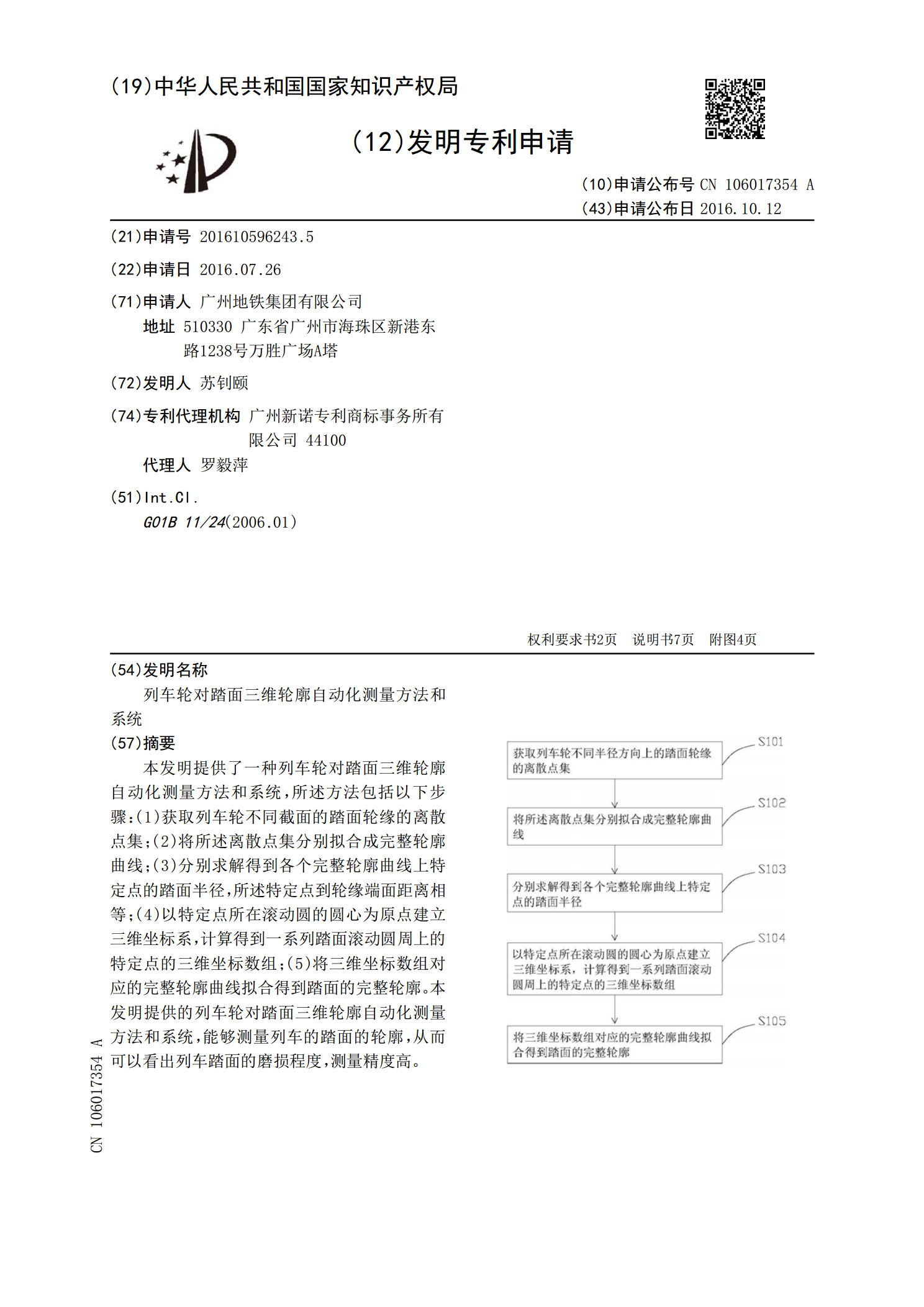
本发明提供了一种列车轮对踏面三维轮廓自动化测量方法和系统,所述方法包括以下步骤:(1)获取列车轮不同截面的踏面轮缘的离散点集;(2)将所述离散点集分别拟合成完整轮廓曲线;(3)分别求解得到各个完整轮廓曲线上特定点的踏面半径,所述特定点到轮缘端面距离相等;(4)以特定点所在滚动圆的圆心为原点建立三维坐标系,计算得到一系列踏面滚动圆周上的特定点的三维坐标数组;(5)将三维坐标数组对应的完整轮廓曲线拟合得到踏面的完整轮廓。本发明提供的列车轮对踏面三维轮廓自动化测量方法和系统,能够测量列车的踏面的轮廓,从而可以看

基于误差修正的列车轮踏面三维轮廓自动化测量方法和系统.pdf
本发明提供了基于误差修正的列车轮踏面三维轮廓自动化测量方法,包括以下步骤:获取列车轮不同截面的踏面轮缘的离散点集;将离散点集分别拟合成完整轮廓曲线;获取轮缘顶端与传感器平台的间距值,并修正滚动圆半径变化带来的轮缘和踏面上的特定点的高度误差;分别求解得到各个完整轮廓曲线上特定点的踏面半径,特定点到轮缘端面距离相等;以特定点所在滚动圆的圆心为原点建立三维坐标系,计算得到一系列踏面滚动圆周上的特定点的三维坐标数组;将三维坐标数组对应的完整轮廓曲线拟合得到踏面的完整轮廓。本发明提供的基于误差修正的列车轮踏面三维轮
列车轮对踏面标准滚动圆廓形自动化测量方法和系统.pdf
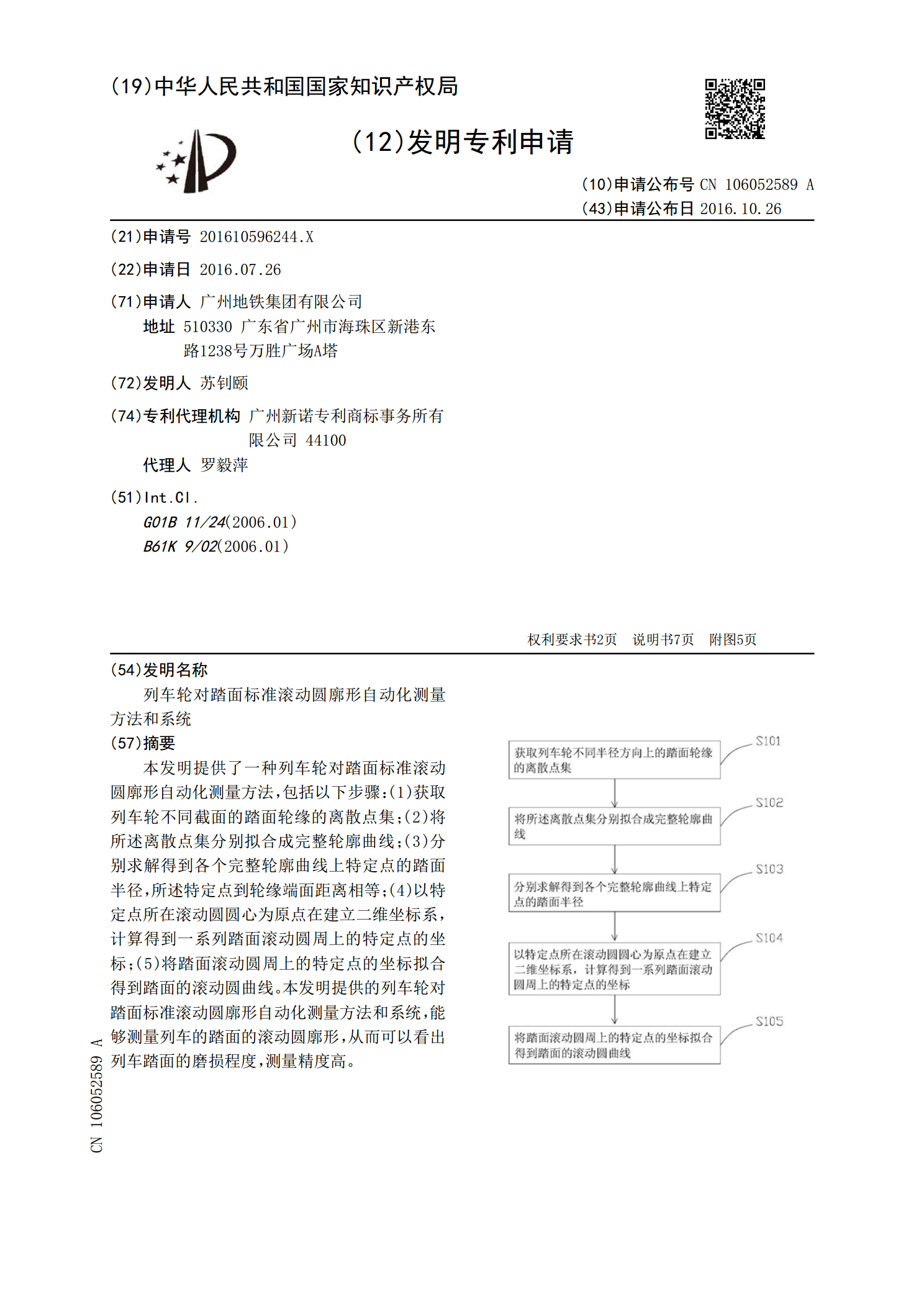
本发明提供了一种列车轮对踏面标准滚动圆廓形自动化测量方法,包括以下步骤:(1)获取列车轮不同截面的踏面轮缘的离散点集;(2)将所述离散点集分别拟合成完整轮廓曲线;(3)分别求解得到各个完整轮廓曲线上特定点的踏面半径,所述特定点到轮缘端面距离相等;(4)以特定点所在滚动圆圆心为原点在建立二维坐标系,计算得到一系列踏面滚动圆周上的特定点的坐标;(5)将踏面滚动圆周上的特定点的坐标拟合得到踏面的滚动圆曲线。本发明提供的列车轮对踏面标准滚动圆廓形自动化测量方法和系统,能够测量列车的踏面的滚动圆廓形,从而可以看出列

基于图像的轮对踏面轮廓测量方法.docx
基于图像的轮对踏面轮廓测量方法基于图像的轮对踏面轮廓测量方法摘要:轮对是铁路车辆中重要的组成部分之一,其踏面的状况直接影响到行车安全和铁路设施的使用寿命。传统的轮对踏面轮廓测量方法需要专用设备和人工操作,且效率低下。本文则提出了一种基于图像的轮对踏面轮廓测量方法,利用计算机视觉技术和图像处理算法实现自动化测量,提高了测量精度和效率。通过实验验证了该方法的可行性和准确性。关键词:轮对;踏面轮廓;图像处理;计算机视觉;测量方法1.引言轮对是铁路车辆中重要的组成部分之一,负责支撑车体和传递车辆重量。由于长期的使

列车轮对踏面故障监控系统研究.docx
列车轮对踏面故障监控系统研究标题:列车轮对踏面故障监控系统研究摘要:随着铁路系统的发展,列车轮对的安全性和正常运作变得越来越重要。列车轮对是列车的重要组成部分,因此对其踏面故障进行及时监控和维护显得尤为关键。本论文旨在研究列车轮对踏面故障监控系统,探讨不同监控方法的有效性,并提出一种有效的监控系统,以提高列车运行的安全性和可靠性。1.引言1.1研究背景1.2目的和意义1.3文章结构2.列车轮对踏面故障2.1踏面故障的定义及分类2.2踏面故障对列车运行的影响3.现有监控方法总结3.1监控方法一:基于振动信号