
手术机器人及其机械臂.pdf

一条****然后


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手术机器人及其机械臂.pdf
本发明提供了一种手术机器人及机械臂;机械臂包括竖直移动关节、重力平衡机构和第一传动机构,竖直移动关节具有连接器以驱动外部构件沿竖直方向移动,重力平衡机构通过第一传动机构与连接器连接,以配平连接器和外部构件;重力平衡机构包括配平结构和第一柔性体,第一传动机构包括比例轮和第二柔性体,比例轮包括内轮和外轮;第一柔性体分别与配平结构和内轮连接,第二柔性体之第一本体围绕并部分固连外轮,第一本体的两端分别与第二柔性体之第一、二延伸部连接,第一本体围绕外轮的方向与第一柔性体连接内轮的方向相反,第一、二延伸部的另一端分别

手术机器人及其机械臂.pdf
本发明提供了一种手术机器人及机械臂;机械臂包括水平移动关节、竖直移动关节和第二传动机构,水平移动关节包括N个上下堆叠的水平移动模块,第一个水平移动模块用以连接外部固定架,其余用以沿水平方向运动,第m个水平移动模块滑动连接第m‑1个水平移动模块,第N个水平移动模块连接竖直移动关节,第二传动机构包括第二制动轮和第三柔性体,第二制动轮设于第N个水平移动模块上,第三柔性体的第二本体围绕并部分固连第二制动轮,第二本体的第三、四端分别与第三柔性体的第三、四延伸部的一端连接,第三、四延伸部的另一端分别与第一个水平移动模

机械臂的控制方法、机械臂和手术机器人.pdf
本发明公开了一种机械臂的控制方法、机械臂和手术机器人,该方法包括:采集操作者施加在机械臂操控端的交互信号,包括力信号、力矩信号和/或按键信号;判别采集到的交互信号是否大于其对应的预设阈值,若大于其对应的预设阈值,则将采集的力与力矩输入至机械臂的雅可比矩阵,以确定映射到机械臂的各个运动关节处的交互信号;按照各个运动关节处的交互信号进行导纳控制,以控制各运动关节的运动。

机械臂组件及手术机器人.pdf
本发明公开了一种机械臂组件及手术机器人。机械臂组件包括第一自由臂、第二自由臂、第一球头关节、第二球头关节、第一锁定机构、第二锁定机构以及调节机构。第一自由臂包括第一外臂和第一回拉部件;第二自由臂包括第二外臂和第二回拉部件;第一球头关节包括第一球套和第一球头部;第二球头关节包括第二球套和第二球头部;调节机构包括调节部件、主轴以及推动部件,推动部件设置于主轴上,第一套体和第二套体均套设在主轴上并位于推动部件的外周,且第一回拉部件远离第一球头关节的一端连接在主轴上,第二回拉部件远离第二球头关节的一端连接在主轴上
一种机械臂及手术机器人.pdf
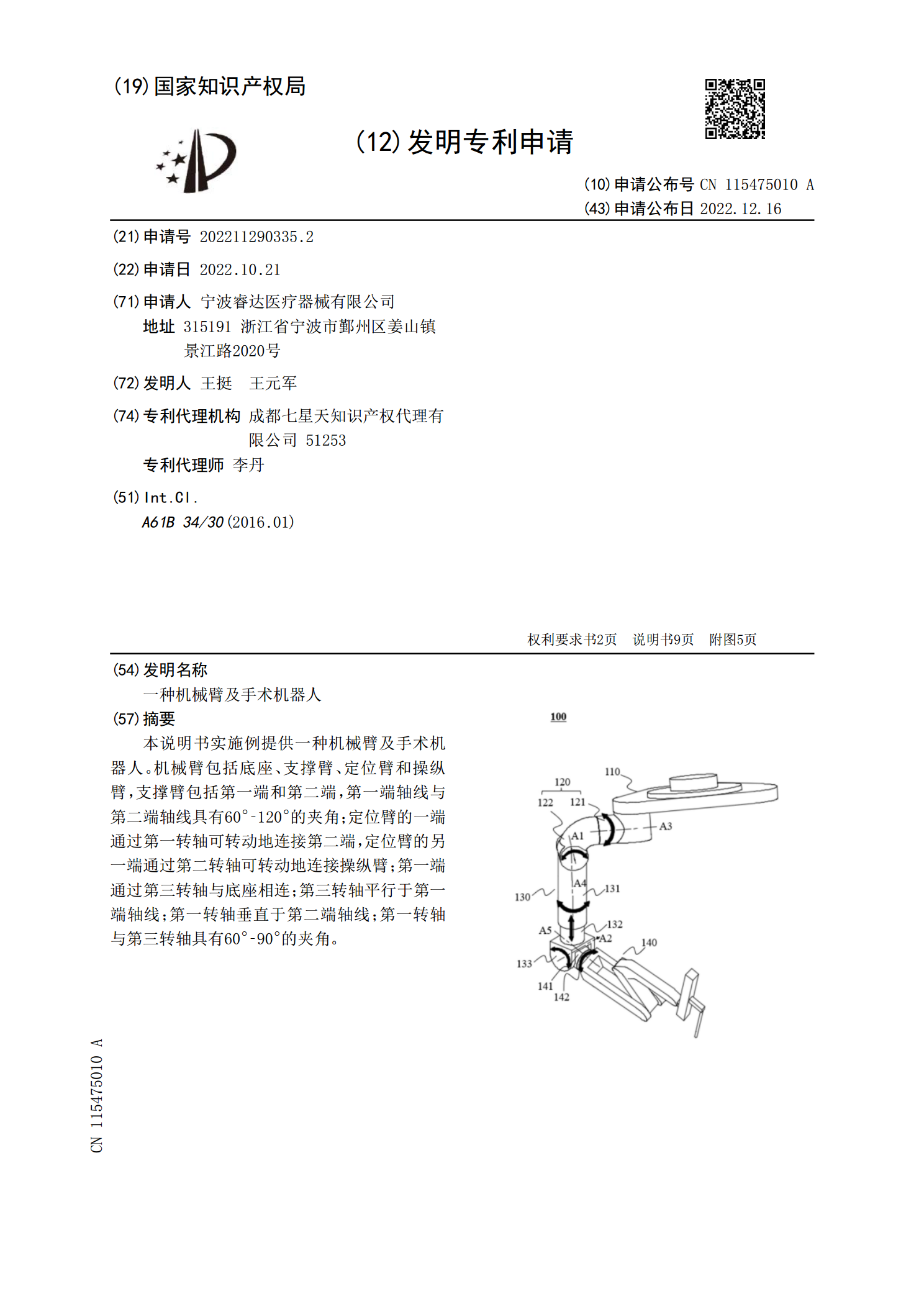
本说明书实施例提供一种机械臂及手术机器人。机械臂包括底座、支撑臂、定位臂和操纵臂,支撑臂包括第一端和第二端,第一端轴线与第二端轴线具有60°?120°的夹角;定位臂的一端通过第一转轴可转动地连接第二端,定位臂的另一端通过第二转轴可转动地连接操纵臂;第一端通过第三转轴与底座相连;第三转轴平行于第一端轴线;第一转轴垂直于第二端轴线;第一转轴与第三转轴具有60°?90°的夹角。