
一种新型缆索爬升装置.pdf

是你****嘉嘉

1/7

2/7

3/7
4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型缆索爬升装置.pdf
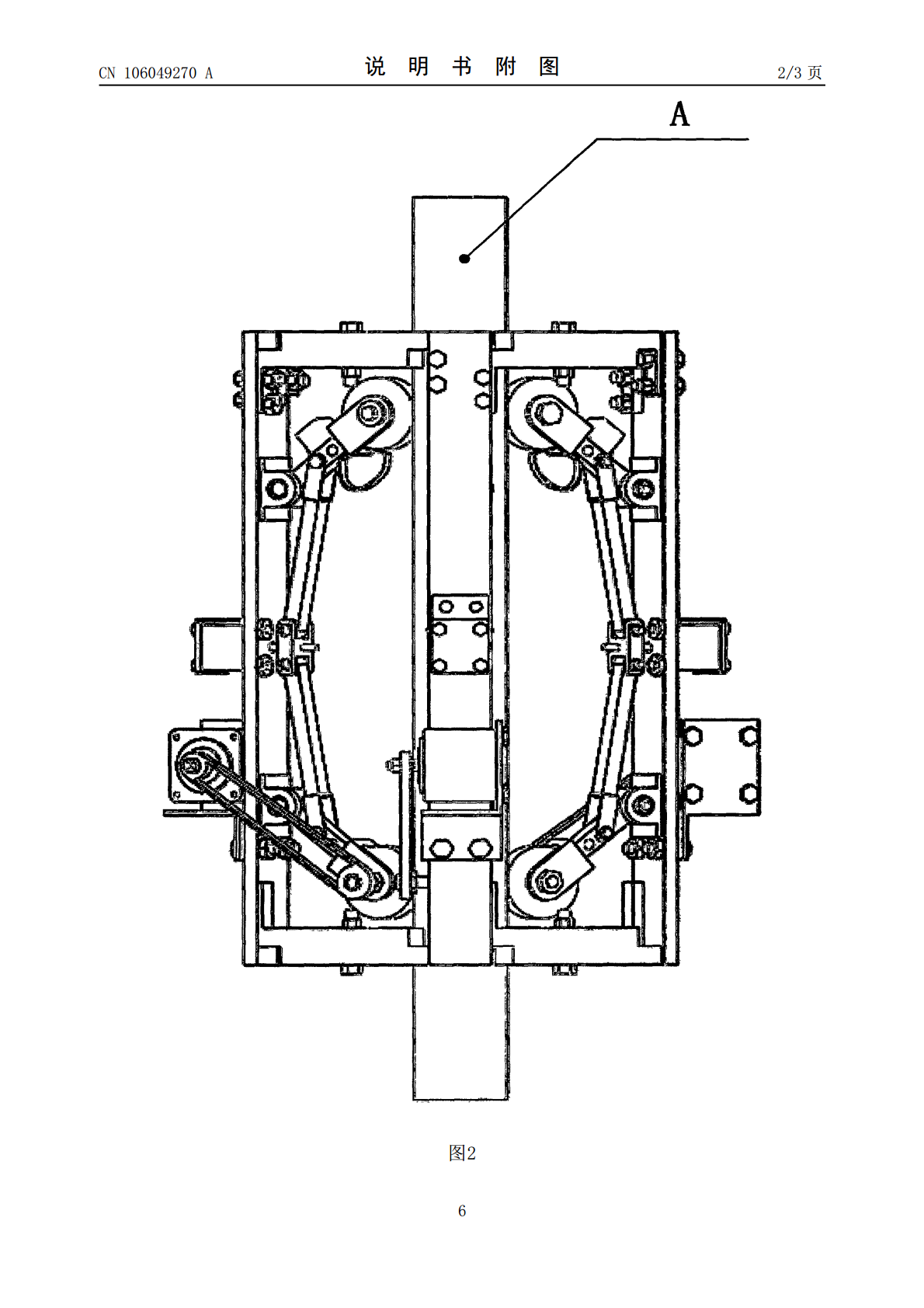
一种新型缆索爬升装置,其包括:机架(1),以及由上滚轮(2)、上铰链I(3)、上连杆I(4)、制动器(5)、上铰链II(6)、上支撑座(7)、上铰链III(8)、上连杆II(9)、上铰链IV(10)、预紧件(11)、丝杆(12)、预紧电机(13)、下铰链I(14)、下连杆I(15)、驱动电机(16)、同步带轮I(17)、下支撑座(18)、下铰链II(19)、同步带(20)、下铰链III(21)、下连杆II(22)、同步带轮II(23)、下铰链IV(24)和下滚轮(25)组成的爬升单元(K),本发明可以作为
一种新型轮式缆索爬升装置.pdf
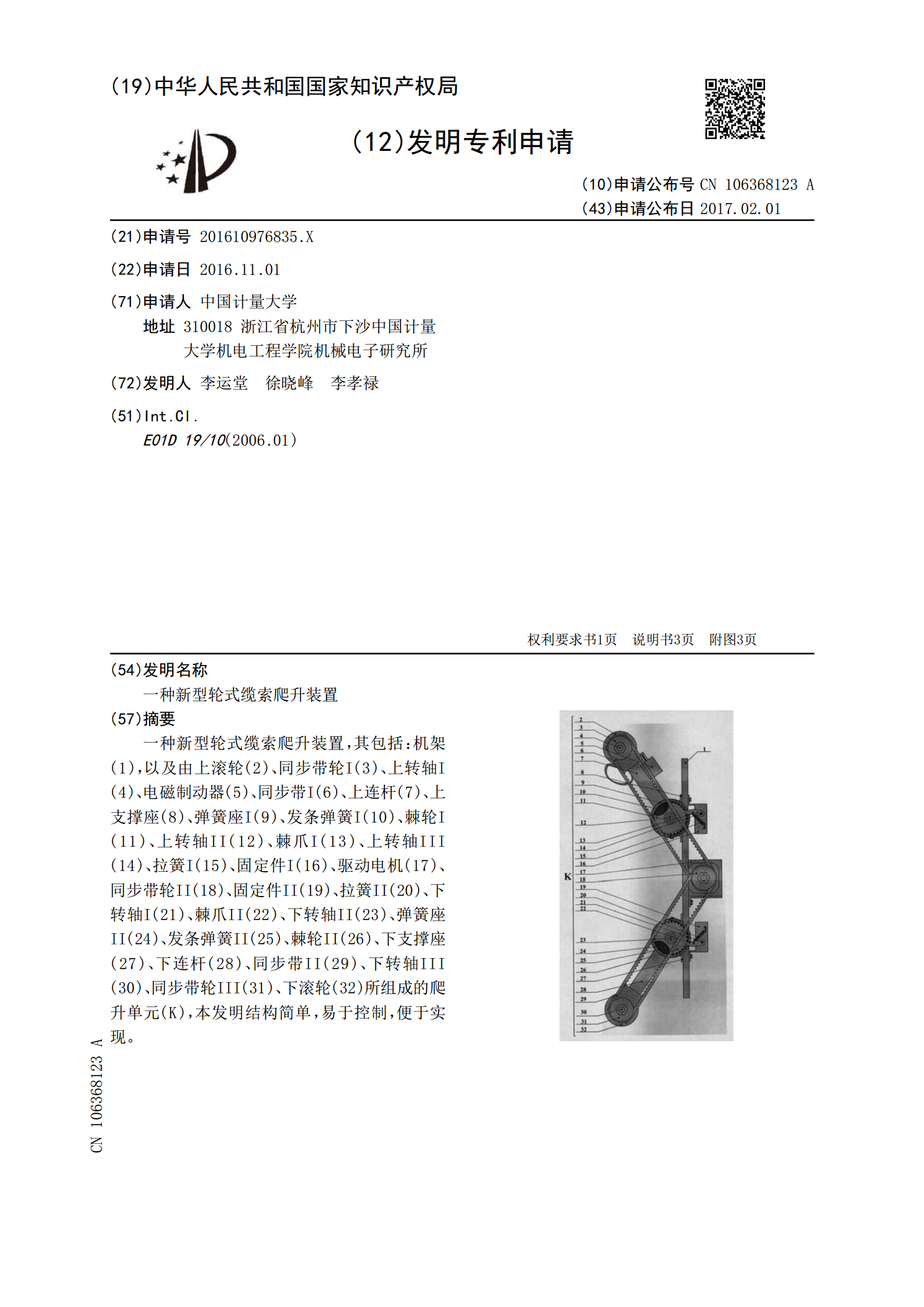
一种新型轮式缆索爬升装置,其包括:机架(1),以及由上滚轮(2)、同步带轮I(3)、上转轴I(4)、电磁制动器(5)、同步带I(6)、上连杆(7)、上支撑座(8)、弹簧座I(9)、发条弹簧I(10)、棘轮I(11)、上转轴II(12)、棘爪I(13)、上转轴III(14)、拉簧I(15)、固定件I(16)、驱动电机(17)、同步带轮II(18)、固定件II(19)、拉簧II(20)、下转轴I(21)、棘爪II(22)、下转轴II(23)、弹簧座II(24)、发条弹簧II(25)、棘轮II(26)、下支撑座
一种连续移动式缆索爬升装置.pdf
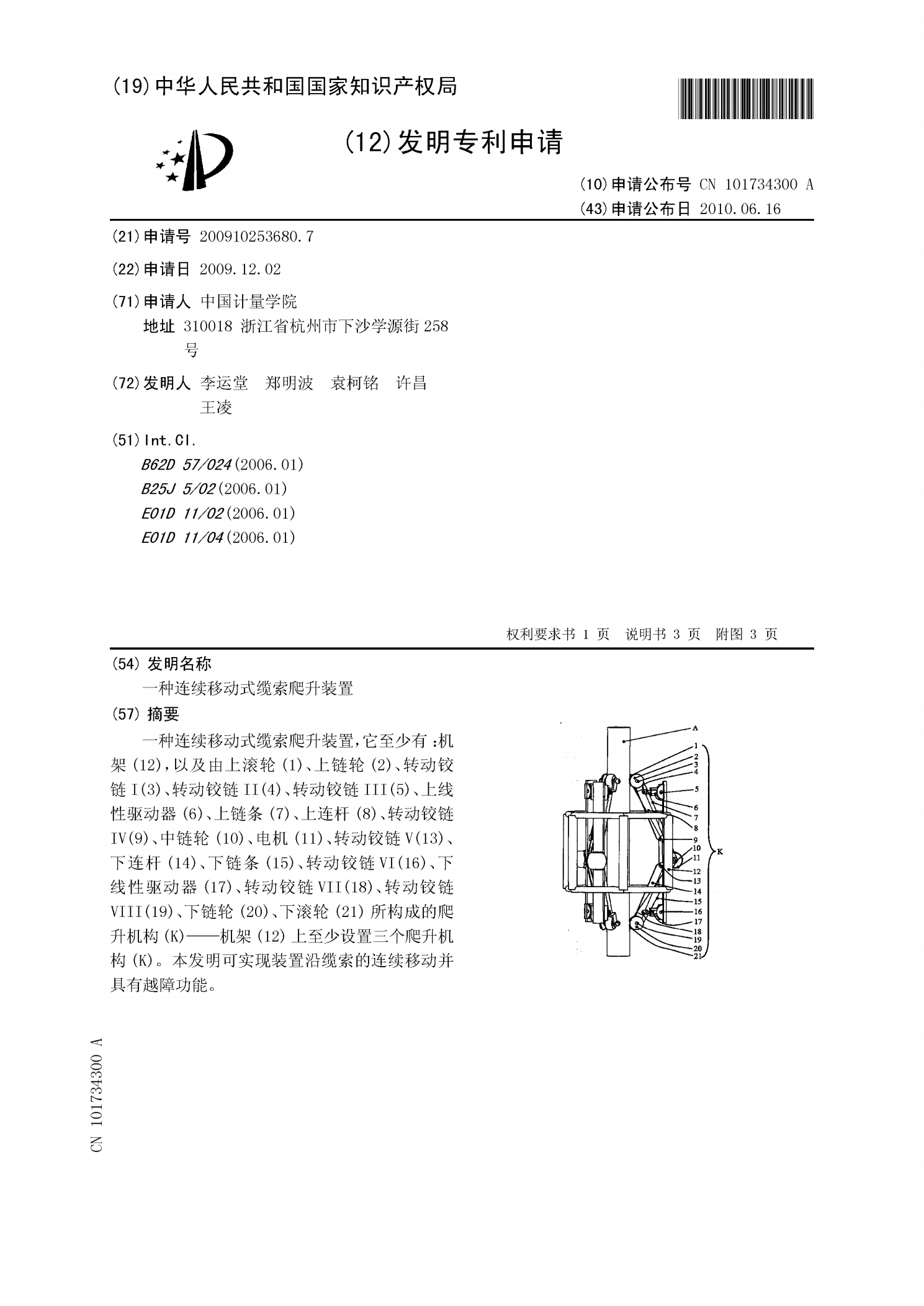
一种连续移动式缆索爬升装置,它至少有:机架(12),以及由上滚轮(1)、上链轮(2)、转动铰链I(3)、转动铰链II(4)、转动铰链III(5)、上线性驱动器(6)、上链条(7)、上连杆(8)、转动铰链IV(9)、中链轮(10)、电机(11)、转动铰链V(13)、下连杆(14)、下链条(15)、转动铰链VI(16)、下线性驱动器(17)、转动铰链VII(18)、转动铰链VIII(19)、下链轮(20)、下滚轮(21)所构成的爬升机构(K)——机架(12)上至少设置三个爬升机构(K)。本发明可实现装置沿缆索
一种用于高空缆索爬升机器人的动态下降限速装置.pdf
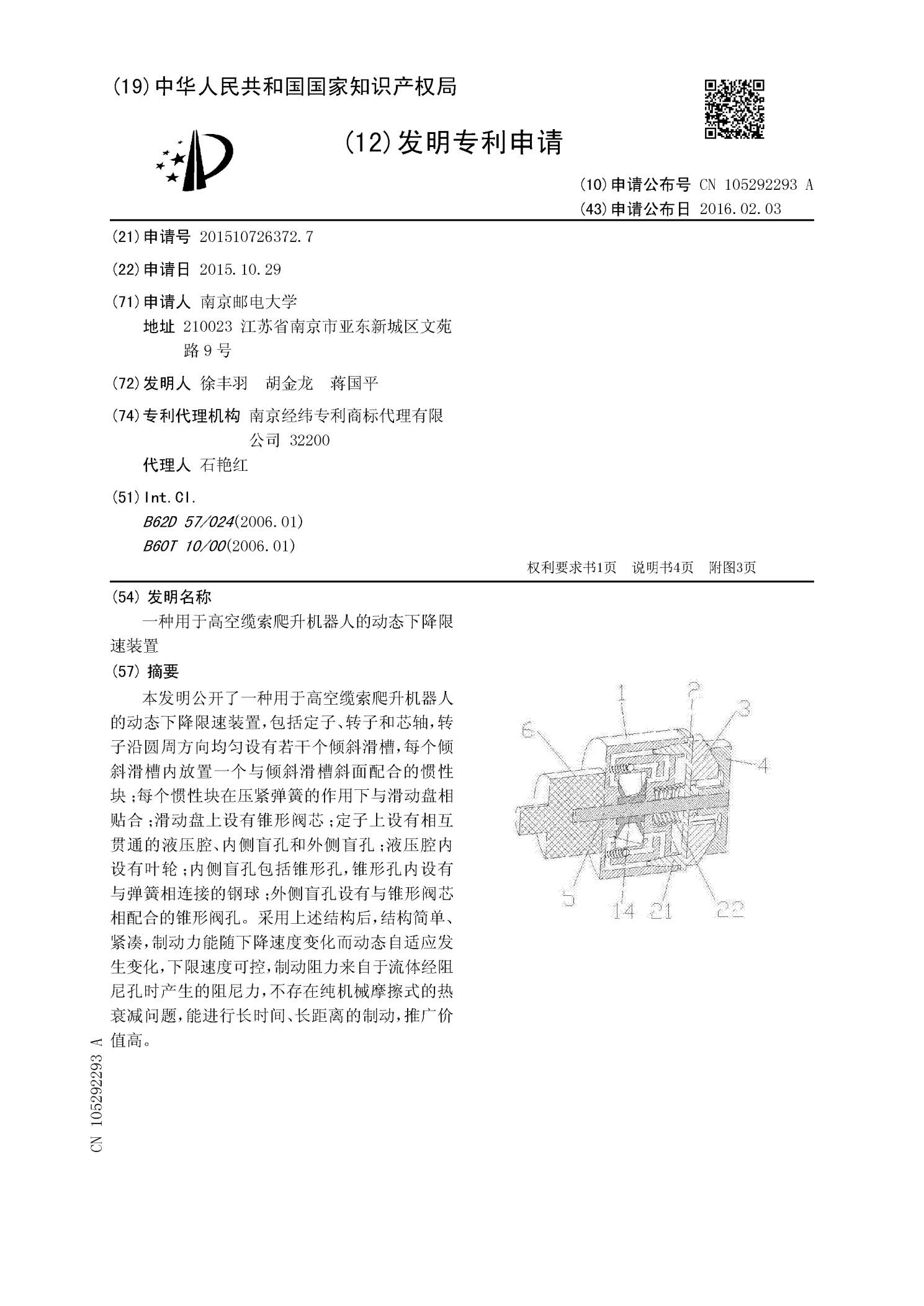
本发明公开了一种用于高空缆索爬升机器人的动态下降限速装置,包括定子、转子和芯轴,转子沿圆周方向均匀设有若干个倾斜滑槽,每个倾斜滑槽内放置一个与倾斜滑槽斜面配合的惯性块;每个惯性块在压紧弹簧的作用下与滑动盘相贴合;滑动盘上设有锥形阀芯;定子上设有相互贯通的液压腔、内侧盲孔和外侧盲孔;液压腔内设有叶轮;内侧盲孔包括锥形孔,锥形孔内设有与弹簧相连接的钢球;外侧盲孔设有与锥形阀芯相配合的锥形阀孔。采用上述结构后,结构简单、紧凑,制动力能随下降速度变化而动态自适应发生变化,下限速度可控,制动阻力来自于流体经阻尼孔时

一种闭式高空缆索爬升机器人.pdf
本发明公开了一种闭式高空缆索爬升机器人,包括三个滚轮组、侧边支撑、下降限速装置和障碍感应装置,侧边支撑对称设置在三个滚轮组的两侧,将三个滚轮组形成一个封闭式结构。每个滚轮组均包括至少一个滚轮,每个滚轮组均能作为驱动轮组。采用上述结构后,整个机构呈一种弹性机构,并不是对每个轮子单独进行弹性悬挂,故对越障极为有利。下降限速装置能实现对下降速度的调节,当机器人爬升不同倾角的缆索时,更具有实际的意义。流体阻尼,与机械式摩擦制动相比,热稳定性好,适合长时间,长距离制动,制动力不会衰减。同时制动力的大小将能随下降速度